.png) STMCU小助手
发布时间:2022-8-15 21:00
STMCU小助手
发布时间:2022-8-15 21:00
|
前言 HC-SR04作为简单的外设模块,广泛应用于简单的课设项目中,十分适合入门STM32。 一、HC-SR04介绍 HC-SR04的介绍,这里就不做累述了,大家可以上某宝上找店家要下用户手册,或者到其他博主的博客中看个大概的介绍。 二、使用步骤 1.接口定义
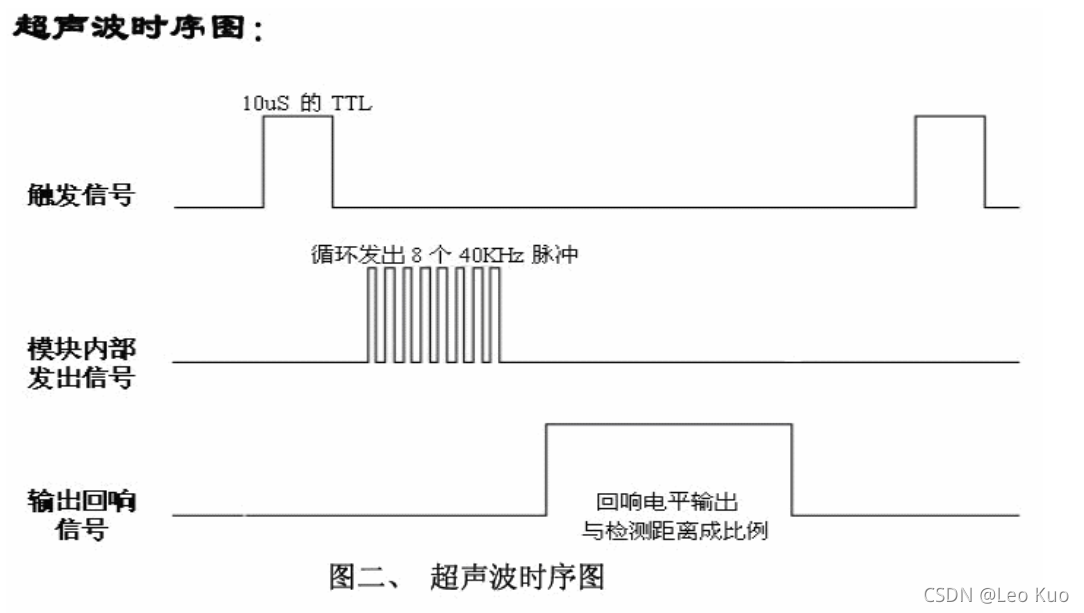
TRIG和ECHO两个接口也可以使用其他的IO口继续驱动,在这篇文章中,博主用的是PA6和PA7。当然也可以使用其他的IO口,只需要所使用的IO口可以输出输入高低电平即可。 2.阅读时序图 
如图,驱动HC-SR04需要先向TRIG口输入一段超过10us的高电平。此时模块会自动输出脉冲信号来检测是否接收到了信号的返回。若接收到了返回信号,则会将ECHO段拉高并持续一段时间,而持续的时间便是超声波信号发出到接收到返回的超声波信号的时间。 3.原理 
原理:IO口发送触发信号拉高Trig,延迟超过10us之后,再拉低Trig,作为超声波模块的启动信号,此时模块不断自动发出一段40khz的信号,当收到返回的超声波信号时,ECHO口则输出回响信号 。回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号时间间隔可以计算得到距离. 4.代码 hscr.c下的代码:
代码分析:该段代码初始化HC-SR04所使用到的IO口和时钟。并没有什么难度。 main. c的代码如下:
代码分析:此段代码的重点在于两个while循环,两个while循环都是为了检查ECHO的输出以及查询其高电平持续的时间,通过持续时间算出测量距离。 |
分享STM32资料-采用 STM32U031R8 MCU 的 STM32 Nucleo-64 开发板,官方资料,数据手册等资料
HRTIM 指南
使用 STM32 的 DWT 单元监控内存
DAC,COMP,HRTIM Fault 功能的使用
一个软件引起的 LSE 驱动不良的问题
STM32 GUI LTDC 最大像素时钟评估方法
STM32 Cordic 运算速度评估
全新OpenSTLinux 6.1版本发布
ST-LINK Utility介绍、下载、安装和使用教程
【2025·STM32峰会】GUI解决方案实训分享1-对LVGL咖啡机例程的牛刀小试以及问题排查
 微信公众号
微信公众号
 手机版
手机版