.png) STMCU小助手
发布时间:2022-8-19 16:32
STMCU小助手
发布时间:2022-8-19 16:32
|
一. 简介 MPU6050是一款六轴陀螺仪,可以通过IIC协议输出三个方向上的加速度和角速度,在平衡车和飞控中较为常见。一般情况下,模块有用的引脚只有四个(其它的不常用),即VCC,GND,SDA和SCL。操作它的第一步,即编写IIC协议。 二. IIC协议 作为三大常用协议之一,掌握它是非常有必要的。IIC为主从协议,分为主机和从机。IIC协议要比SPI要简单那么一点,没有像SPI那样还有模式的配置。下面就简单说说IIC协议。 SDA: IIC的数据线 SCL:IIC的时钟线 1.空闲态: SDA和SCL都为高电平。 2.起始态: 主机将SDA拉低 3.数据传输: 在SCL为低电平的时候,将数据输出,在SCL为高电平的时候,将数据输入。 4.应答态:在SCL为高电平的时候,检测到SDA为低电平。 5.非应答态:在SCL为高电平的时候,检测到SDA为高电平。 6.停止态:在SCL为高电平的时候,将SDA由低拉高。 IIC协议一共可以分为这六种状态,接下来将简要说明如何将这六种状态组成一个完整的IIC协议,来驱动MPU6050。 (1). IIC写 数据输出是以一个byte为单位的,从机地址一般为七位,与读写标志一起组成一个byte。0为写,1为读。 开始 -》 从机地址 + 0 -》 应答 -》发送寄存器地址 -》 应答 -》 写入数据 -》 非应答(应答) -》 停止 
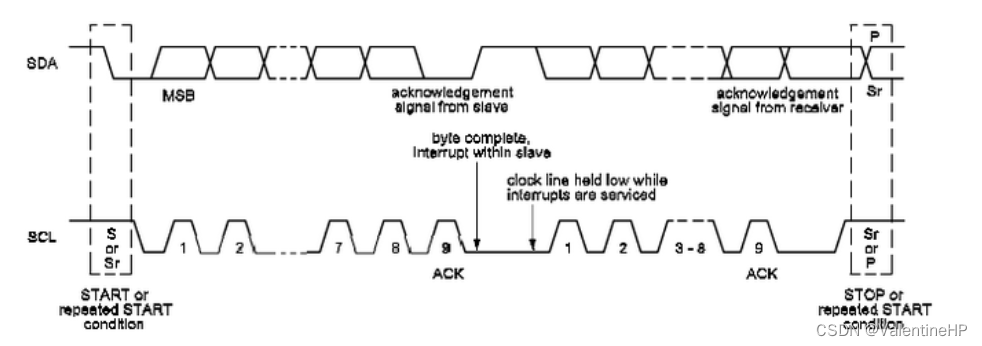
(2). IIC读 IIC读数据要比IIC写数据要复杂一点,主要是步骤上多了几步,但是状态什么的都完全一样。 开始 -》 从机地址 + 0 -》 应答 -》发送读取寄存器地址 -》 应答 -》开始 -》 从机地址 + 1 -》 读取数据 -》应答 -》 停止 可以看到,只要将这几个状态实现了,按照这个流程就可以很容易实现IIC的读和写。大概的时序图如下。 
三. 代码实现 根据上面的六个状态,定义出对应的六个函数,对应的只有五个,空闲态忽略,因为经过Stop后,IIC的时钟线和数据线都已经为高了。delay时间需要根据从机所能接受的最大速率来决定,不然的话,会出错,下面就来详细说明这几个函数。 
(1) MPU6050IICDelay(void) 这就不用说明什么了
(2) MPU6050IICStart(void) 将SDA配置为输出模式。然后将SCL和SDA全部拉高,dealy后,将SDA拉低,就ok了。
(3) MPU6050IICACK(void) 这里只包含了从机应答。
(4) MPU6050IICStop(void) 停止位这里,需要先将SCL和SDA都拉低,然后先将SCL拉高,后将SDA拉高,
(5) MPU6050IICWrite(void)
(6) MPU6050IICRead(void)
读写数据,可以搭配时序图来,都是将SCL为低的时候,将数据送出去。在SCL为高的时候,接收数据。 然后将上面的这几个函数依次组合成读写两个函数 
这里IIC驱动编写完成。 四. MPU6050 初始化 初始化的实质就是对寄存器进行配置,这就要查看芯片手册,了解每一个寄存器的作用了,以及初始化的时候寄存器配置的顺序。 这里将重要的寄存器列举出来了
(1). 初始化
(2)验证 通过读取芯片的ID,可以确定IIC是否有问题。
分享一个成果图 
|
分享STM32资料-采用 STM32U031R8 MCU 的 STM32 Nucleo-64 开发板,官方资料,数据手册等资料
HRTIM 指南
使用 STM32 的 DWT 单元监控内存
DAC,COMP,HRTIM Fault 功能的使用
一个软件引起的 LSE 驱动不良的问题
STM32 GUI LTDC 最大像素时钟评估方法
STM32 Cordic 运算速度评估
全新OpenSTLinux 6.1版本发布
ST-LINK Utility介绍、下载、安装和使用教程
【2025·STM32峰会】GUI解决方案实训分享1-对LVGL咖啡机例程的牛刀小试以及问题排查
 微信公众号
微信公众号
 手机版
手机版