.png) STMCU小助手
发布时间:2023-2-9 17:42
STMCU小助手
发布时间:2023-2-9 17:42
|
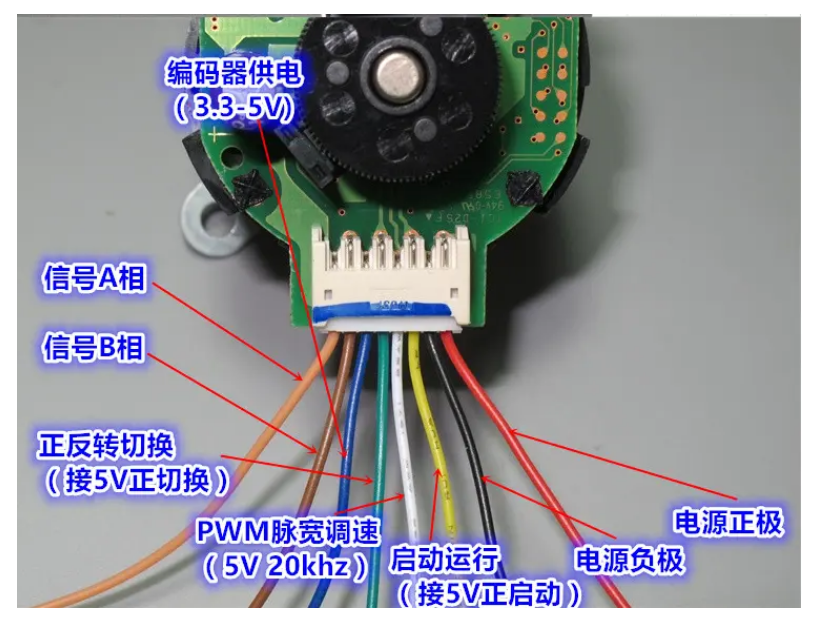
背景 本文用于记录平衡自行车的制作过程,及制作中遇到的问题;总体方案如下:采用采用STM32F103C8T6作为主控单元、MPU-6050作为位姿采集单元、0.96寸OLED显示位姿、无刷电机带动动量轮调节小车平衡、1S锂电池配合5V和12V升压模块作为电源、蓝牙模块用于无线控制及调试、SG90舵机用于控制行驶方向。 无刷电机简介 我用的无刷电机是在TB上淘的便宜货,小日本万宝至无刷电机,内置驱动,带100线双通道编码器,12V-24V的电压下均可运行。 ![21ZNG9V]}G9}`O~$RJD~PD5.png](data/attachment/forum/202302/09/174255yjr2iu4d5242iri4.png "21ZNG9V]}G9}`O~$RJD~PD5.png")
无刷电机驱动 在上一篇专栏建立工程()的基础上,使用外部中断测量电机转速,使用定时器3产生PWM信号控制电机转速,从而实现电机的闭环控制。 1、STM32外部中断配合编码器测独特速度 将编码器A相与PA3连接,B相与PA4连接,并且连接编码器VCC、GND。 在mian.c文件中重新定义外部中断回调函数:
在mian()函数while循环中增加在OLED中显示编码器运动状态的相关代码:
最终演示效果如下: 
2、STM32定时器PWM控制电机转速 在mian()函数增加下列代码,打开定时器3,并设置初始占空比为1(此时为PWM输出为高电平)
在mian()函数while循环中增加下列代码,是PWM占空比由1-0逐渐下降
通过测量PWM输出引脚的电压变化,大致判断PWM输出是否正常,如下所示: 
3、STM32F103C8T6引脚、外部中断、定时器3配置如下: 设置PA3引脚为GPIO_EXTI3;PA4引脚为GPIO_INPUT; ![]13O5_K{{)`S)D2JA0P{BLD.png](data/attachment/forum/202302/09/174256pmreooehmnp3p9en.png "]13O5_K{{)`S)D2JA0P{BLD.png")
打开外部中断3 AL0D$BCH9MXUIO@`0PW}U8.png")
设置外部中断引脚PA3为上拉,触发模式:上升沿触发 X3}~5`XM%E_4.png")
设置引脚PA4为上拉 ![9XW@}7(2M%]9T)K[_FV%(.png](data/attachment/forum/202302/09/174258vgsewzeukgsggsus.png "9XW@}7(2M%]9T)K[_FV%(.png")
设置定时器3通道1位PWM输出模式,PWM频率位20kHz(计算方式参考()),初始占空比为1000。 ![_{8N]~`I4]QEILQNJ(5Y`9I.png](data/attachment/forum/202302/09/174259zi90z4rk94u1k64u.png "_{8N]~`I4]QEILQNJ(5Y`9I.png")
作者:DIY攻城狮 https://www.bilibili.com/read/cv21718261?spm_id_from=333.999.0.0 出处:bilibili |
实战经验 | STM32CubeIDE实用技巧之如何指定变量、函数、文件到指定内存
【STM32U3 评测】步进电机驱动
【STM32U3 评测】MNIST 数字识别
【STM32U3 评测】介绍、环境搭建、工程测试
STM32Cube嵌入式软件更新
一步到位!STM32CubeIDE 搭建 ClassB 功能安全工程
扩展器件适配、优化开发流程——STM32CubeIDE 2.1.0新版本发布
留言赢礼 | 全新升级的STM32CubeIDE for Visual Studio Code
直播回顾 | STM32CubeIDE for VS Code开发新体验
经验分享 | LAT1485 STM32CubeIDE实用技巧之条件断点的妙用
 微信公众号
微信公众号
 手机版
手机版










学习学习