.png) STMCU小助手
发布时间:2023-3-7 14:00
STMCU小助手
发布时间:2023-3-7 14:00
|
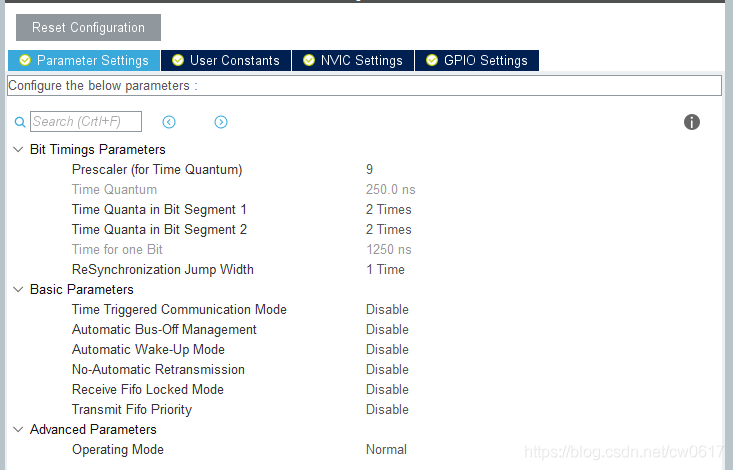
1、默认STM32CAN1就是主站。CAN2是从站 2、主站配置如下:参考时钟是72M/2=36M 波特率:36M/9/(2+2+1)=800K.所以通讯频率800K。 注意此处BUS-Off一定要enable。否则出现插上下载器两个站就不能同时发送的情况 
3、中断设置 
4、can开启函数: HAL_CAN_Start(&hcan1); HAL_CAN_ActivateNotification(&hcan1,CAN_IT_RX_FIFO0_MSG_PENDING); can发送函数: void CAN_TRANSMIT1(void) { TxMessage2.DLC=8; TxMessage2.StdId=0x314; TxMessage2.ExtId=0x00001314; TxMessage2.IDE=CAN_ID_EXT; TxMessage2.RTR=CAN_RTR_DATA; uint8_t TR_BUF[8]=“22222222”; if(HAL_CAN_AddTxMessage(&hcan1,&TxMessage2,TR_BUF,(uint32_t*)CAN_TX_MAILBOX1)!=HAL_OK) { printf("???1"); } } 5、can1配置 static void MX_CAN1_Init(void) { /* USER CODE BEGIN CAN1_Init 0 / CAN_FilterTypeDef sFilterConfig; / USER CODE END CAN1_Init 0 */ /* USER CODE BEGIN CAN1_Init 1 */ /* USER CODE END CAN1_Init 1 / hcan1.Instance = CAN1; hcan1.Init.Prescaler = 18; hcan1.Init.Mode = CAN_MODE_NORMAL; hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ; hcan1.Init.TimeSeg1 = CAN_BS1_2TQ; hcan1.Init.TimeSeg2 = CAN_BS2_1TQ; hcan1.Init.TimeTriggeredMode = DISABLE; hcan1.Init.AutoBusOff = ENABLE; hcan1.Init.AutoWakeUp = DISABLE; hcan1.Init.AutoRetransmission = DISABLE; hcan1.Init.ReceiveFifoLocked = DISABLE; hcan1.Init.TransmitFifoPriority = DISABLE; if (HAL_CAN_Init(&hcan1) != HAL_OK) { Error_Handler(); } / USER CODE BEGIN CAN1_Init 2 */ sFilterConfig.FilterBank = 0; sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; sFilterConfig.FilterIdHigh = 0x0000; sFilterConfig.FilterIdLow = 0x0000; sFilterConfig.FilterMaskIdHigh = 0x0000; sFilterConfig.FilterMaskIdLow = 0x0000; sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0; sFilterConfig.FilterActivation = ENABLE; sFilterConfig.SlaveStartFilterBank = 14; if(HAL_CAN_ConfigFilter(&hcan1, &sFilterConfig)!=HAL_OK) { Error_Handler(); } /* USER CODE END CAN1_Init 2 */ } 6、CAN1中断函数 void CAN1_RX0_IRQHandler(void) { /* USER CODE BEGIN CAN1_RX0_IRQn 0 */ HAL_CAN_GetRxMessage(&hcan1,CAN_RX_FIFO0,&RxMessage1,RXBUF); /* USER CODE END CAN1_RX0_IRQn 0 / HAL_CAN_IRQHandler(&hcan1); / USER CODE BEGIN CAN1_RX0_IRQn 1 */ /* USER CODE END CAN1_RX0_IRQn 1 */ } 7、CAN2配置 static void MX_CAN2_Init(void) { /* USER CODE BEGIN CAN2_Init 0 / CAN_FilterTypeDef sFilterConfig; / USER CODE END CAN2_Init 0 */ /* USER CODE BEGIN CAN2_Init 1 */ /* USER CODE END CAN2_Init 1 / hcan2.Instance = CAN2; hcan2.Init.Prescaler = 18; hcan2.Init.Mode = CAN_MODE_NORMAL; hcan2.Init.SyncJumpWidth = CAN_SJW_1TQ; hcan2.Init.TimeSeg1 = CAN_BS1_2TQ; hcan2.Init.TimeSeg2 = CAN_BS2_1TQ; hcan2.Init.TimeTriggeredMode = DISABLE; hcan2.Init.AutoBusOff = ENABLE; hcan2.Init.AutoWakeUp = DISABLE; hcan2.Init.AutoRetransmission = DISABLE; hcan2.Init.ReceiveFifoLocked = DISABLE; hcan2.Init.TransmitFifoPriority = DISABLE; if (HAL_CAN_Init(&hcan2) != HAL_OK) { Error_Handler(); } / USER CODE BEGIN CAN2_Init 2 */ sFilterConfig.FilterBank = 14; sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; sFilterConfig.FilterIdHigh = 0x0000; sFilterConfig.FilterIdLow = 0x0000; sFilterConfig.FilterMaskIdHigh = 0x0000; sFilterConfig.FilterMaskIdLow = 0x0000; sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0; sFilterConfig.FilterActivation = ENABLE; sFilterConfig.SlaveStartFilterBank = 14; if(HAL_CAN_ConfigFilter(&hcan2, &sFilterConfig)!=HAL_OK) { Error_Handler(); } HAL_CAN_Start(&hcan2); HAL_CAN_ActivateNotification(&hcan2,CAN_IT_RX_FIFO0_MSG_PENDING); /* USER CODE END CAN2_Init 2 */ } 8、CAN2中断函数 void CAN2_RX0_IRQHandler(void) { /* USER CODE BEGIN CAN2_RX0_IRQn 0 / HAL_CAN_GetRxMessage(&hcan2,CAN_RX_FIFO0,&RxMessage1,RXBUF); / USER CODE END CAN2_RX0_IRQn 0 / HAL_CAN_IRQHandler(&hcan2); / USER CODE BEGIN CAN2_RX0_IRQn 1 */ /* USER CODE END CAN2_RX0_IRQn 1 */ } 9、CAN2发送函数 void CAN_TRANSMIT1(void) { static uint8_t ll; TxMessage2.DLC=8; TxMessage2.StdId=0x003; TxMessage2.ExtId=0x00000003; TxMessage2.IDE=CAN_ID_EXT; TxMessage2.RTR=CAN_RTR_DATA; ll++; if(ll>100) {ll=0;} uint8_t TR_BUF[8]={0,1,2,3,4,5,6,ll}; if(HAL_CAN_AddTxMessage(&hcan2,&TxMessage2,TR_BUF, (uint32_t*)CAN_TX_MAILBOX1)!=HAL_OK) { // } } ———————————————— 版权声明:冬麻麻 |
STM32开发环境迁移实践:从 CubeMX 生成 CMake 工程到 VS Code 编译与调试
【STM32U3 评测】步进电机驱动
STM32CubeMX 6.17新版本发布
从 CubeMX 到 MX2:这些关键变化必须知道
配置工具STM32CubeMX2
ST推出全新STM32CubeMX2,秒启动,告别卡顿和臃肿!
STM32CubeMX出2.0了!CubeMX2速览-教程版
新版STM32CubeMX2初体验,抛弃了JAVA方案,采用Electron,启动速度非常流畅,不再支持MDK5
兔哥心中的ST中文论坛
实战经验 | 从CubeMX下载生成STM32元件封装库
 微信公众号
微信公众号
 手机版
手机版