|
摘要 本章还是点灯,但是小飞哥带大家换一种点灯方式,利用PWM功能实现“呼吸灯”,什么是呼吸灯?顾名思义,像人呼吸一样的灯...简而言之就是,吸气...呼气...实现灯光渐亮渐灭的效果。
PWM原理介绍脉冲宽度调制(PWM),是英文“Pulse Width Modulation” 的缩写,简称脉宽调制,是利用 微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。简单一点,就是对脉冲宽 度的控制,如下图(摘自正点原子手册)
PWM 原理示意图
上图就是一个简单的PWM 原理示意图。图中,我们假定定时器工作在向上计数PWM模式,且当 CNT<CCRx时,输出0,当CNT>=CCRx时输出1。那么就可以得到如上的PWM示意图:当CNT值小于CCRx的时候,IO输出低电平(0),当CNT值大于等于CCRx的时候,IO输出高电平(1),当CNT达到ARR值的时候,重新归零,然后重新向上计数,依次循环。改变CCRx的值,就可以改变PWM输出的占空比,改变 ARR的值,就可以改变PWM输出的频率,这就是PWM输出的原理。
STM32的定时器几乎都能够产生PWM波,高级定时器 TIM1和TIM8可以同时产生多达7路的PWM输出。而通用定时器也能同时产生多达4路的PWM输出,如下图定时器4,可以产生4路PWM波。本文,咱们只使用一路PWM,学懂原理之后,随便怎么搞~

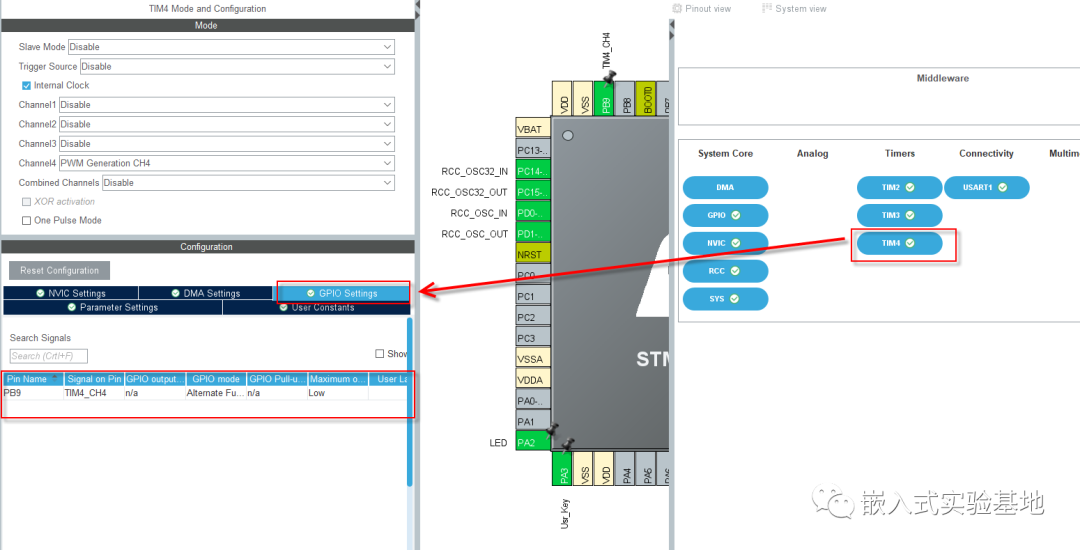
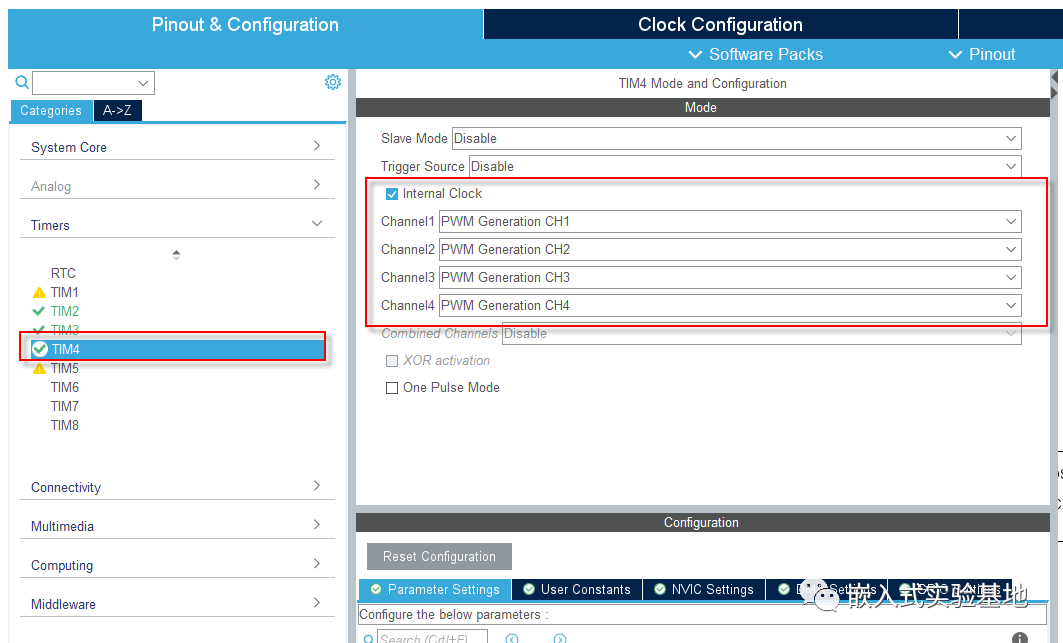 cubemx配置PWM cubemx配置PWM本次使用的是TIM4的通道4来产生PWM波,也即是PB9。硬件连接比较简单,LED正极连接PB9,负极连接GND即可。 关于时钟等配置,就不多做介绍了 选择TIM4->勾选inter clock->通道4->PWM output CH4->PB9

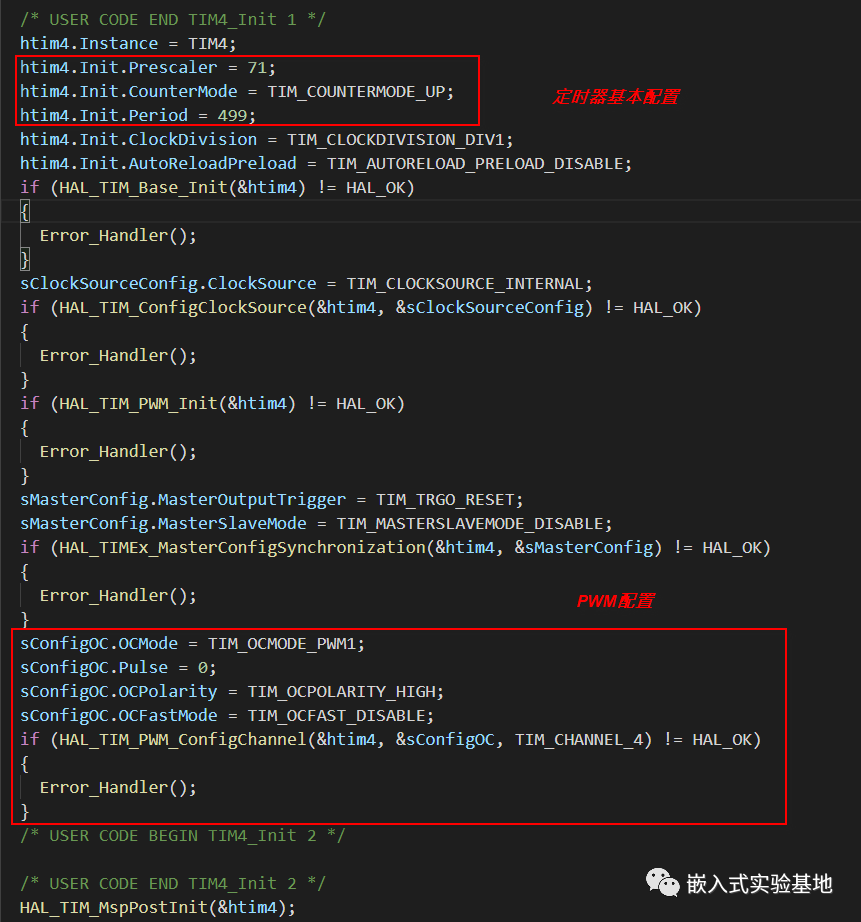
定时器参数配置,主要分为两部分,一部分是定时器的基本配置,分频系数、周期,这个配置不是固定的,把握频率的计算方式即可: fclk= (Fcore/(Prescaler+1)/(Period+1)
按照我的配置,计算有得到: fclk = 72000000/500/72=2KHZ 这个频率是直接影响到LED灯光的闪烁频率的,如果设置的太低了,会有明显的闪烁感。

PB9是被复用的

配置是比较简单的,直接生成代码即可
PWM代码解析上面知道,PB9是被复用为PWM通道功能的,代码如下,自从有了cubemx,代码初始化似乎变得简单了呢... - void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle)
- {
- GPIO_InitTypeDef GPIO_InitStruct = {0};
- if(timHandle->Instance==TIM4)
- {
- /* USER CODE BEGIN TIM4_MspPostInit 0 */
- /* USER CODE END TIM4_MspPostInit 0 */
- __HAL_RCC_GPIOB_CLK_ENABLE();
- /**TIM4 GPIO Configuration
- PB9 ------> TIM4_CH4
- */
- GPIO_InitStruct.Pin = GPIO_PIN_9;
- GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
- GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
- HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
- /* USER CODE BEGIN TIM4_MspPostInit 1 */
- /* USER CODE END TIM4_MspPostInit 1 */
- }
- }
上面我们对定时器及PWM参数的配置代码如下,其中有一个参数.pulse,这个参数是决定PWM的占空比的,计算如下: Pulse = .pulse/period
计算得出的就是我们波形,高电平(由于是配置的模式1)所占整个周期的比例,占得比例越高,相应的电压会越高,对应的LED灯会越亮
关于定时器的参数是被封装在一个结构体里面的: - /**
- * @brief TIM Time base Configuration Structure definition
- */
- typedef struct
- {
- uint32_t Prescaler; /*!< Specifies the prescaler value used to divide the TIM clock.
- This parameter can be a number between Min_Data = 0x0000 and Max_Data = 0xFFFF */
- uint32_t CounterMode; /*!< Specifies the counter mode.
- This parameter can be a value of @ref TIM_Counter_Mode */
- uint32_t Period; /*!< Specifies the period value to be loaded into the active
- Auto-Reload Register at the next update event.
- This parameter can be a number between Min_Data = 0x0000 and Max_Data = 0xFFFF. */
- uint32_t ClockDivision; /*!< Specifies the clock division.
- This parameter can be a value of @ref TIM_ClockDivision */
- uint32_t RepetitionCounter; /*!< Specifies the repetition counter value. Each time the RCR downcounter
- reaches zero, an update event is generated and counting restarts
- from the RCR value (N).
- This means in PWM mode that (N+1) corresponds to:
- - the number of PWM periods in edge-aligned mode
- - the number of half PWM period in center-aligned mode
- GP timers: this parameter must be a number between Min_Data = 0x00 and
- Max_Data = 0xFF.
- Advanced timers: this parameter must be a number between Min_Data = 0x0000 and
- Max_Data = 0xFFFF. */
- uint32_t AutoReloadPreload; /*!< Specifies the auto-reload preload.
- This parameter can be a value of @ref TIM_AutoReloadPreload */
- } TIM_Base_InitTypeDef;
- /**
- * @brief TIM One Pulse Mode Configuration Structure definition
- */
- typedef struct
- {
- uint32_t OCMode; /*!< Specifies the TIM mode.
- This parameter can be a value of @ref TIM_Output_Compare_and_PWM_modes */
- uint32_t Pulse; /*!< Specifies the pulse value to be loaded into the Capture Compare Register.
- This parameter can be a number between Min_Data = 0x0000 and Max_Data = 0xFFFF */
- uint32_t OCPolarity; /*!< Specifies the output polarity.
- This parameter can be a value of @ref TIM_Output_Compare_Polarity */
- uint32_t OCNPolarity; /*!< Specifies the complementary output polarity.
- This parameter can be a value of @ref TIM_Output_Compare_N_Polarity
- @note This parameter is valid only for timer instances supporting break feature. */
- uint32_t OCIdleState; /*!< Specifies the TIM Output Compare pin state during Idle state.
- This parameter can be a value of @ref TIM_Output_Compare_Idle_State
- @note This parameter is valid only for timer instances supporting break feature. */
- uint32_t OCNIdleState; /*!< Specifies the TIM Output Compare pin state during Idle state.
- This parameter can be a value of @ref TIM_Output_Compare_N_Idle_State
- @note This parameter is valid only for timer instances supporting break feature. */
- uint32_t ICPolarity; /*!< Specifies the active edge of the input signal.
- This parameter can be a value of @ref TIM_Input_Capture_Polarity */
- uint32_t ICSelection; /*!< Specifies the input.
- This parameter can be a value of @ref TIM_Input_Capture_Selection */
- uint32_t ICFilter; /*!< Specifies the input capture filter.
- This parameter can be a number between Min_Data = 0x0 and Max_Data = 0xF */
- } TIM_OnePulse_InitTypeDef;
同样的,PWM的配置也是被封装在一个结构体里面,所以说,用了cubemx是方便了,其实对初学者学习是不太好的,知道了怎么用功能,但是背后的代码结构可能了解的会很少...

 关于PWM的函数还是非常多的,此次功能比较简单,仅仅用到了红框中的几个函数,主要看看start函数,其他的初始化过程中自动调用了,不用关心。

start函数需要传两个参数,一个是定时器,另一个是对应的PWM通道号,本次 利用到的是TIM4,通道4

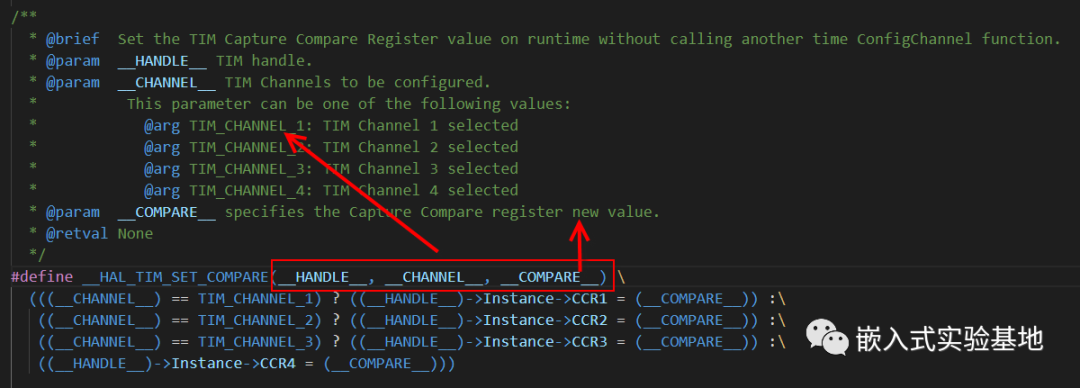
启动定时器之后,我们需要更改的参数是PWM的占空间比,HAL库以宏定义的方式给了我们定义,看了这个代码之后,你有没有一种感觉,每天满世界找优秀的代码,找优美的宏定义写法,这不就挺好的...所以,库函数本身就是一个宝藏学习资料,大家不要忽略了

 代码编写 代码编写看了上面的函数介绍之后,其实写起来就很简单了,结构体能够让代码变得整洁一些,先来定义一个呼吸灯相关的结构体: - typedef struct{
- uint16_t LedpwmVal;//占空比调整参数
- uint8_t LedpwmVal_Dir:1;//调整方向,1-递增,0递减
- }peripheral;
初始化结构体成员为0,1,启动PWM波,接下来编写呼吸灯效果代码,代码也是非常的简单,延时是不能省略的,否则效果是眼睛分辨不出来的...代码也是非常的简单
- while (1)
- {
- /* USER CODE END WHILE */
- /* USER CODE BEGIN 3 */
- HAL_Delay(10);//加延时,否则变化不明显,看不到效果
-
- if(PWM.LedpwmVal_Dir)
- PWM.LedpwmVal++;
- else
- PWM.LedpwmVal--;
-
- if(PWM.LedpwmVal>breath_UP)
- PWM.LedpwmVal_Dir=Breath_DOWN;//切换为PWM值递减状态
-
- if(PWM.LedpwmVal==Breath_DOWN)
- PWM.LedpwmVal_Dir=1;//切换为PWM值递增状态
-
- // TIM4->CCR4 = PWM.LedpwmVal;
- __HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_4,PWM.LedpwmVal);//设置占空比参数
- }
呼吸灯波形实际是怎么样的呢,接下来通过逻辑分析仪来看看波形
为了效果明显,我们选择10ms增加10的比例来看看波形: 递增效果:

递减效果:

转载自:Embedded小飞哥
如有侵权请联系删除
| 

 微信公众号
微信公众号
 手机版
手机版