|
1.1 初学者重要提示 1、 关于学习方法问题,可以看附件章节A。 2、 学会 STM32H7相关资源的获取方法,做到心中有数,否则心里老是没底。 3、 关于MDK和IAR两种编译器,推荐都掌握,以其中一个为主,另一个为辅。因为很多时候我们需要参考的工程代码不是自己熟悉的编译器,就会很被动。 4、 相对于F1、F4系列,H7最大的区别的还是MPU和Cache的配置,这两个配置会贯穿整个教程为大家做讲解,而外设的学习大同小异。 5、 H7携带了DTCM和ITCM,ITCM用于运行指令,也就是程序代码,DTCM用于数据存取,特点是跟内核速度一样,而片上的其它RAM主频都是200MHz,所以要充分发挥TCM的性能。 6、 STM32H7系列只有HAL库,没有再配套标准库了,这点要知道。HAL库的优点是配置方便,特别是配合图形开发工具STM32CubeMX时,缺点是源代码稍显臃肿,封装的有点多。 7、 这几年涌现出好几款非常棒的调试工具(如Event Recoder,SEGGER RTT),教程的后面章节会为大家做讲解。
; R- W* }- Q; O4 P" q1 j! J1.2 开发环境说明1、 IDE:支持两种IDE开发环境,MDK和IAR a. MDK推荐使用MDK5.26正式版及其以上版本。 b. IAR固定使用IAR8.3版本,由于IAR向下兼容性稍差,其它版本未做支持。 2、 调试器使用JLINK,CMSIS-DAP,ULINK或者STLINK均可。 3、 配套开发板是安富莱的:STM32-V7开发板,MCU是STM32H743XIH6。
2 W/ i. s' ^# R. o
1.3 STM32H7和F1,F4系列的区别使用STM32H7跟F1,F4系列的区别。 1、 最大的区别H7是多了一个L1 Cache一级缓存,这个缓存在为低速存储器带来加速的同时,也为程序设计带来了一些问题,其中最为主要的是数据一致性问题。 2、 STM32H7的自带外设比较之前的任何STM32型号都要生猛,算是大换血了,换了ADC,DMA,USART等重要外设,性能比之前要强劲很多。比如ADC换成了3.6Msps 16位分辨率,DMA支持任意互联了,USART也支持波特率自适应。 3、 到了STM32H7系列,ST官方仅提供了HAL库,没有再提供标准库,而对于F1,F4系列,标准库和HAL库都是有的。 4、 F1是M3内核,F4是M4内核,而STM32H7是M7内核,从编程的角度来说,几乎没有区别。. `- t" s4 ?/ N- K7 D2 U2 i2 b
, E% N7 u5 k) G5 P( G8 G. }
总的来说,主要有上面这四点不同,其它地方与使用F1,F4系列是相同的。
; \& H+ T3 K2 v- k: p
1.4 STM32H7开发资源查找学习一款新的芯片,需要大家从官方获取两方面的资料,一个是相关的技术文档,比如参数手册、数据手册、应用笔记等;另一个是软件包,官方在软件包中提供了外设驱动库和基于此库的大量例程。
& X* ]$ S% N' c1 K; P8 f5 f
1.4.1 开发文档学习STM32H7主要下载哪些相关手册呢?主要有以下几个,这几个手册是我们经常要使用到的,不光学习STM32需要这类手册,学习FPGA、DSP也是这些类型的手册,熟练查阅和使用这些手册也是电子工程师必备的知识之一。 * `3 h5 i0 w) K& M1 R+ m# X- S' {% _
参考手册(Reference Manual) 对芯片每个外设的具体描述和功能介绍,比如我们要查USART,SPI,DMA相关寄存器和功能的介绍就可以使用这个手册。
: I: }1 i/ Y$ P5 u$ t7 Z3 v9 L
数据手册(Data Sheet) 在我们要画PCB的时候用到这个手册的情况比较多,这个手册上面有关于这个系列芯片的引脚定义、电气特性、机械封装、料号定义等信息。
& S8 [5 g6 Y* F/ [9 N6 T" d
勘误手册(Errata Sheet) 描述了芯片某些功能的局限性,并给出解决办法。这个手册也比较重要,有时候我们觉得有些地方调试老是出问题,就需要查找一下,看看是否是硬件bug。
$ V* _( K, w2 j+ H. u9 D0 `" K
闪存编程手册(Flash Programming Manual) 芯片的片上Flash操作指南,比如芯片的擦除,编程,闪存读写保护,选项字节信息等。 ( D: I* i1 i, h# K& _& q0 q
内核编程手册(Cortex-M Programming Manual) 对内核的系统控制块的介绍。这个手册有时候也要用到,比如我们需要了解NVIC和SysTick相关的寄存器,就需要使用这个手册。这个手册可以在ARM官方网站下载,也可以到ST官网下载,区别是ARM官网下载的手册是通用的,而ST的是针对自家芯片做的。有时候在参考手册上面找不到相关寄存器的信息时,就需要用到这个手册。
; Z1 h I2 N! Q/ U
应用笔记(Application Note) 针对不同应用主题的描述性文档,部分笔记还会有配套的固件例程。应用笔记的重要性不言而喻,很多时候官方对一些应用做出了解决方案,都会以应用笔记的形式发布。 ' S) ~4 u0 _' t0 X7 z$ S
用户手册(User Manual) 一般是对某个软件库的说明文档。
8 k m* v$ h9 k) Q$ ]
Cortex-M3/M4权威指南 这也是非常重要的参考资料,对于有兴趣了解M3/M4内核的同学,这个资料相当重要,了解了内核才能更好的利用M3/M4。虽然是STM32H7是M7内核,大部分内容跟M3/M4都是一样的。 了解了这些手册的作用以后,我们学习如何在官网上面查找这些文档。前几年ST官方升级后,通过页面超链接的方式查找非常不方便,当前推荐直接在官方右上角的方框里面检索即可,比如使用的是STM32H7,直接输入STM32H7检索: 第1步:进入ST官方地址www.st.com,右上角输入STM32H7检索。 
第2步:检索后会弹出所有STM32H7的芯片(随着时间推移,会增加新型号)。 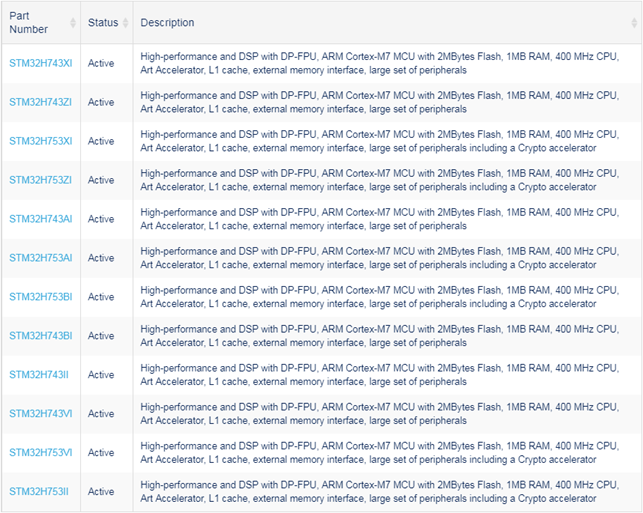
第3步:比如我们用的是STM32H743XI,点击进入第2步截图中的STM32H743XI选项即可。进入后,所有的相关资源就都在这个页面下了。  基本上大家所需的开发文档都在这个页面下了。 6 L/ S& [- X5 p0 F$ ^! z2 l2 ~
1.4.2 软件包 通过上面小节整理完毕相关文档后,就是STM32H7软件包的下载了。软件包也比较好找,同样推荐1.4.1小节的方式。 第1步:进入ST官方地址www.st.com ,右上角输入STM32CubeH7检索。 
第2步:检索后会弹出STM32CubeH7的软件包选项。 
第3步:进入STM32CubeH7的页面地址后,就在页面的最底端看到这个软件包了(随着时间推移,版本会不断更新)。  第4步:点击按钮“Get Software”后,弹出如下界面 
点击ACCEPT进入下面界面: 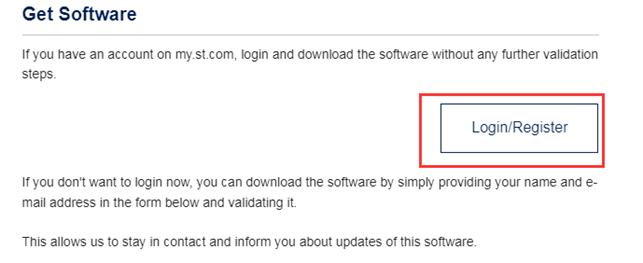
点击Login/Register 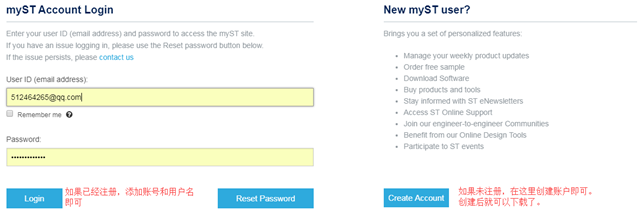
通过上面四步就获取了STM32H7的软件包。软件包的目录结构如下:
6 k r. e+ O. v0 v
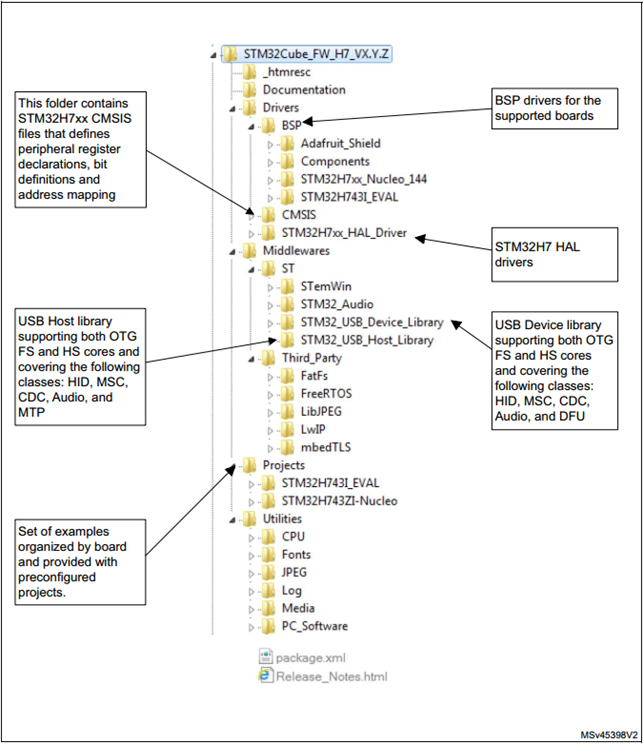
1.5 HAL库介绍HAL库就包含在大家下载的STM32CubeH7软件包里面。软件包的框图如下: 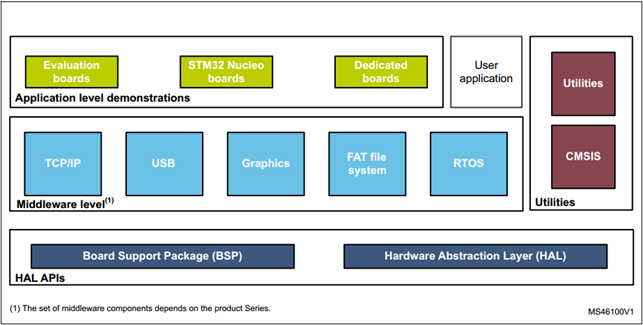
HAL库全称Hardware Abstraction Layer,即硬件抽象层,其实就是STM32H7的外设驱动包。代码文件位于路径:Drivers\STM32H7xx_HAL_Driver。如下是部分截图: 
单从人性化角度,这些外设驱动写的还是比较用心的,特别是每个C文件开头的使用说明。比如文件stm32h7xx_hal_gpio.c开头的说明:
/ s8 D1 Z0 _( a+ r7 ]9 J
- 1=====================================================================; o4 Z. X; |+ W
- 2
9 k5 }8 z1 c; v( A - 3 ##### GPIO Peripheral features #####! l t5 j- e% k0 Z# Z
- 4 + i" _8 O) w: y+ Z! \
- 5======================================================================9 f4 \% S* R# N: G4 P9 ]" l+ N
- 6 9 G- Z0 f) g, h+ |; A+ x* ?. p, [0 R
- 7 [..]
5 C+ r7 C' [4 Z4 K - 8
$ i a2 Z' i9 ~3 \) I - 9 Subject to the specific hardware characteristics of each I/O port listed in the datasheet, each
- q5 u" {1 N% P2 J - 10 ( D. z- c# Z0 c3 `( E, T
- 11 port bit of the General Purpose IO (GPIO) Ports, can be individually configured by software7 p" @* d5 S' n+ @8 h6 Q
- 12
* f; z/ T1 X$ d$ a - 13 in several modes:
% @) }+ j3 M4 c7 F1 A$ S/ \1 D# y - 14 0 J" m% V" I' f3 ^
- 15 (+) Input mode1 q: t% m' O, x! U0 ^
- 16
& S9 u( Y4 v- ~, W4 H( F$ v - 17 (+) Analog mode
# a. R9 k; M# Z+ A. T. Q5 i - 18 / O% u S( K& M
- 19 (+) Output mode
, I3 Y/ Y1 V$ f$ n' e - 20 " x+ z4 W5 B: N7 V( J
- 21 (+) Alternate function mode& A# P7 u7 W! J& B I) }& j7 i
- 22
- O, p, y! x' a# a( D( Q: [ - 23 (+) External interrupt/event lines' G4 S4 M' ?9 Q* O$ f
- 24
0 \8 v6 W6 s: N( `& c - 25 7 ~/ |% @+ Y m1 p
- 26 3 z- W8 i5 h$ x) M6 z
- 27 [..]
6 A' d7 c" {! Y Y2 S$ m; I - 28 - G+ v6 ^* ~, E! ^: B
- 29 During and just after reset, the alternate functions and external interrupt ; \ x [ K( c( L8 L N T
- 30
3 r1 b( b$ S& H4 t) D8 @ - 31 lines are not active and the I/O ports are configured in input floating mode.
/ g1 @1 @5 g) B( e+ b - 32
f. d& s6 o! {+ B% |, P Z# l - 33
, B) a; z0 t6 ~; y$ ]$ Y6 j" Y9 ? - 34 ' M* u3 O2 g2 i* t# Z0 G G% [% x
- 35 [..]
4 i/ m/ F/ r+ k. U# ^2 l& V - 36 % e c8 ?1 p+ R: P* V9 \
- 37 All GPIO pins have weak internal pull-up and pull-down resistors, which can be
) r3 G) o- o' ?! S - 38
. `! p# h" E, @' j3 e. D - 39 activated or not.
+ @% S0 f2 |+ c5 o5 m - 40
5 j0 m6 G/ \$ F5 i% f" f) r - 41 ! ?4 i& N3 t9 c3 f0 Y" f0 }: ^1 h
- 42 ( g( N/ A8 j2 I2 [
- 43 [..]
: L; i: q: Y- O - 44 4 }0 b s6 Y* o) C. [, q0 n+ S
- 45 In Output or Alternate mode, each IO can be configured on open-drain or push-pull
$ Z* G2 }1 A/ e6 f5 @ - 46 7 L) Q* s/ b) }$ o
- 47 type and the IO speed can be selected depending on the VDD value.
; I6 q; I$ T4 x8 M+ E - 48 5 E. l0 z9 Q. x% c
- 49 7 h# o+ f8 D B( L
- 50
- v! v* ^3 r. D r3 b1 A - 51 [..]
) [( Y5 H* J! N3 I5 l- ] - 52
( T# _2 E: n6 F - 53 All ports have external interrupt/event capability. To use external interrupt( P w# W' Q$ i4 B, {# w
- 54 8 q; E4 W. o E6 l7 i+ z7 I
- 55 lines, the port must be configured in input mode. All available GPIO pins are* P4 q$ l! a# g# i
- 56 8 Y3 g: M8 W3 ]4 G) |2 L) T$ S
- 57 connected to the 16 external interrupt/event lines from EXTI0 to EXTI15.6 a' L2 J& j5 k+ C8 ~6 b
- 58
2 \6 r0 Q7 M' s - 59 % `1 W0 Z6 a& y, c0 l C1 o: G
- 60 / l0 r5 {5 B) b5 e: R
- 61 [..]# j" F: J% X( `5 a0 ~3 _0 N
- 62 ' l. n) @# X; V1 r! }) u ?' f2 O, E
- 63 The external interrupt/event controller consists of up to 23 edge detectors* O4 Q8 d O* V! {3 k
- 64 # q$ d1 U) L6 u4 n+ r
- 65 (16 lines are connected to GPIO) for generating event/interrupt requests (each
* A H* J! @( J1 |: k - 66 $ \, p# k# a8 N7 `$ U+ |9 G
- 67 input line can be independently configured to select the type (interrupt or event)6 `6 ?3 m" z7 f0 C$ g. w
- 68 . ?1 Q) M# A8 \8 o' X5 O; y
- 69 and the corresponding trigger event (rising or falling or both). Each line can0 B# A5 x7 [( x4 @" F) q5 ^( N$ ?& Z
- 70 ' |! j$ a' B( n& {7 k
- 71 also be masked independently.
/ y( i( G5 r0 } - 72
( o% q. X! F2 i - 73
* P$ [ O" I" w9 k& A! O - 74
/ l- ^9 ]. F* p1 n2 t* } - 75 ##### How to use this driver #####
6 y: w' A9 b3 o; W - 76 # v Y6 Q- O/ w' X& m
- 77 ============================================================================== + i+ ?9 c! |; S. F( ~% |0 p
- 78 # R) J1 ?3 Q9 n; W2 y8 ?
- 79 [..]' y' V4 @5 t, u3 k. z. J
- 80
# M1 e/ j! T4 `" } _ - 81 (#) Enable the GPIO AHB clock using the following function: __HAL_RCC_GPIOx_CLK_ENABLE().
* b8 Z$ c# I% X% y# | - 82
% N- g% N* Q2 h, {4 F - 83
) _. e! R: e+ @7 `! K7 m! l4 o- u8 B - 84 : U- r T5 b( T, P
- 85 (#) Configure the GPIO pin(s) using HAL_GPIO_Init().
4 U3 `- L! _2 U% c+ C% z- ^6 J - 86 : \, e) H! `" r: _
- 87 (++) Configure the IO mode using "Mode" member from GPIO_InitTypeDef structure
~# q# [3 G6 n9 j* p8 H - 88 - x" M7 m0 `3 N1 K' p% e
- 89 (++) Activate Pull-up, Pull-down resistor using "Pull" member from GPIO_InitTypeDef2 w* z3 k2 O4 {1 Y& }! m
- 90 # [5 T& z/ E% m( ^2 Y+ h
- 91 structure.
! d7 f0 W' r( d - 92
( v2 E6 G9 k! l0 b R$ M - 93 (++) In case of Output or alternate function mode selection: the speed is, |0 D0 r- r$ V; G% N6 u
- 94 # B; b @+ G" C% W0 J) \# e1 s
- 95 configured through "Speed" member from GPIO_InitTypeDef structure.% a5 A t. c+ t. Q
- 96
% n/ q* R+ I: d7 O2 Q# j% ^ - 97 (++) In alternate mode is selection, the alternate function connected to the IO. G7 z& ]* X, f5 B. [3 e- N
- 98 % w1 y; ~! M: I5 }! u# G
- 99 is configured through "Alternate" member from GPIO_InitTypeDef structure.
3 k3 v; ~! L: _- q - 100 # O5 y( d, H' Q: i5 o# F
- 101 (++) Analog mode is required when a pin is to be used as ADC channel
/ `& x% h8 r& ]* t9 F5 d - 102
5 F: s0 W6 H, s* S - 103 or DAC output.+ r5 F: K/ k& p7 I
- 104 ) K8 {4 D1 w2 H* B. S
- 105 (++) In case of external interrupt/event selection the "Mode" member from
: o7 P3 Y& g$ S/ R7 n c - 106
+ ~; A% j% L3 p5 H1 b - 107 GPIO_InitTypeDef structure select the type (interrupt or event) and
: X4 o' m! Q5 E6 N( m# j/ A( U- ^ - 108 6 C4 M N0 Y1 {5 `# g
- 109 the corresponding trigger event (rising or falling or both).
% j6 [- Z' f/ b - 110
( I* M6 A: h V1 W - 111 % @9 a. k. B, [+ F# P2 V; |' B- w
- 112 8 Q8 \: {2 Q9 g8 V
- 113 (#) In case of external interrupt/event mode selection, configure NVIC IRQ priority
/ k$ [4 |, ~9 X+ F0 p S8 \! Q! h0 o - 114 : ]! j5 }2 v- c: P( q
- 115 mapped to the EXTI line using HAL_NVIC_SetPriority() and enable it using
( ^! x* w+ O# i) B - 116 , Z) M) b7 @9 y
- 117 HAL_NVIC_EnableIRQ().
6 V& A% D; I% x9 Z2 M- V9 Q+ p - 118
& J2 s# u. F+ |& U) }$ F$ X9 m2 v! A! t - 119
% U# r* n: l' `) o - 120
2 D$ f9 Q" K- m; p1 M* r - 121 (#) To get the level of a pin configured in input mode use HAL_GPIO_ReadPin().
- i$ A2 `! m; \$ H7 D9 K - 122
2 r f: H! L2 M- s$ P8 r) P8 k - 123
& m% W( Z" K7 [- r - 124 0 }" I n, b# }6 y6 l, h! j
- 125 (#) To set/reset the level of a pin configured in output mode use# M5 K& `0 g d& D6 q K: a
- 126 # U% x, c1 Q U/ x# t( ?# E; X" u
- 127 HAL_GPIO_WritePin()/HAL_GPIO_TogglePin().
3 {- L; R0 j0 z" X0 v) }, x6 @ - 128
2 h" T0 b+ F; L T' _ - 129
, l. v% U/ z% ?9 E - 130 * e! a1 _/ I; P
- 131 (#) To lock pin configuration until next reset use HAL_GPIO_LockPin().
4 [7 A# B$ p+ I% ~* S - 132 ' U9 ^& W) z* e1 R' n7 E
- 133
! B4 m: ^8 X: A* ^7 @! O - 134 ; y) w$ ` t6 Q, R0 K0 h
- 135 , W6 f& {1 F. ^* f+ `8 u
- 136
' W4 [6 G% l1 Q) B2 U - 137 (#) During and just after reset, the alternate functions are not
g+ r# u. d1 z3 C2 K* x - 138 5 |0 F- z' f! k- v( T B8 p
- 139 active and the GPIO pins are configured in input floating mode (except JTAG
" t7 U0 s+ q L$ l9 V - 140 & Z/ W: f5 K; l* n* b. k$ i6 _
- 141 pins).
7 L& D: R8 o4 a& k5 r; J+ h( D4 s% Q - 142 * v( E5 }4 t4 v4 t. I) A, j
- 143
7 I6 R/ \: ?6 f, h# a - 144
8 ^. u5 U& _0 D( z4 r$ H9 l - 145 (#) The LSE oscillator pins OSC32_IN and OSC32_OUT can be used as general purpose
7 I! ]0 E7 J. @- U9 J5 q2 ? - 146
0 f- ~( v3 ^( I+ l1 n" Z% b - 147 (PC14 and PC15, respectively) when the LSE oscillator is off. The LSE has
) Z% v z: \6 Y+ ]5 ` - 148
2 F/ y0 h2 F' P) p' z) N, {, m - 149 priority over the GPIO function.
' Z0 |9 r1 i: c7 Z; ? - 150
8 f8 l k& }3 C- @ - 151 ( J8 S; h. m# ^' ?- y2 U
- 152 ) V- w& \3 n! N1 c
- 153 (#) The HSE oscillator pins OSC_IN/OSC_OUT can be used as s/ L0 z& [' j# z u; F$ T
- 154
5 `+ s5 A1 Q- m8 M; B) K1 D1 y5 T - 155 general purpose PH0 and PH1, respectively, when the HSE oscillator is off.
, l& Q; i' |- C* m+ w' }; z2 B3 w - 156 ( c; s, E6 S7 W
- 157 The HSE has priority over the GPIO function.
/ P* S- ^2 G; l4 {* ~& nHAL库的使用方法跟之前F1,F4系列的标准库差不多,只是HAL库封装的稍显臃肿。事情都是两面的,代码臃肿了,易用性会好些。 ! y- n) r- l, o. U! D# R
1.6 CMSIS软件包介绍CMSIS(微控制器软件接口标准,Cortex Microcontroller Software Interface Standard)是ARM官方设计的驱动包,框图如下: 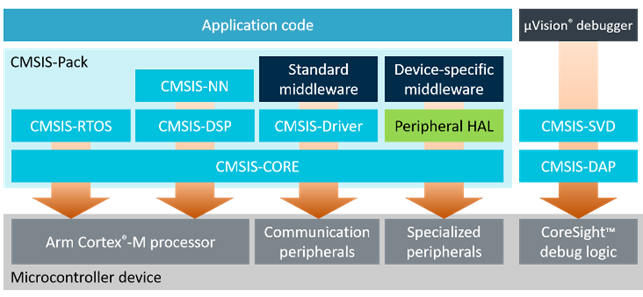
ARM推出CMSIS软件包意在统一各大芯片厂商的外设驱动,DSP数字信号处理,下载器和各个主流RTOS的API统一。几年下来,各个厂商一直是各自为战,所以CMSIS的驱动一直没有被各个芯片厂商采用。而且ARM做得也不够完善,没有ADC、DAC、定时器之类的外设驱动。 这两年情况好了不少,特别是ARM为ST做的CMSIS-Driver明显完善了很多。针对我们这个教程来说,当前还用不到这些东西,主要用到CMSIS软件包里面的如下头文件即可(不同版本,截图中的文件可能不同,这个软件包是一直在更新中的,下面的截图的版本是V5.3.0):
" Q, y* H% T, q9 R8 P7 v2 O( k
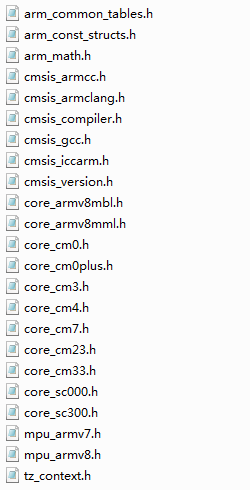
这个软件包可以在三个地方获取: 1、STM32CubeH7软件包里面。 每个版本的Cube软件包都会携带CMSIS文件夹。 2、MDK安装目录(下面是5.3.0版本的路径)。 大家安装了新版MDK后,CMSIS软件包会存在于路径:ARM\PACK\ARM\CMSIS\5.3.0\CMSIS。 3、GitHub。 通过GitHub获取也比较方便 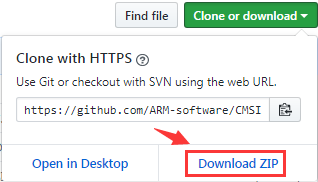
当然,也可以在ARM官网下载,只是这两年ARM官网升级得非常频繁,通过检索功能找资料非常麻烦。所以不推荐大家到ARM官网下载资料了。 下面为大家简单介绍下CMSIS软件包里面这几个文件夹: F( X7 c3 _9 u$ e2 q
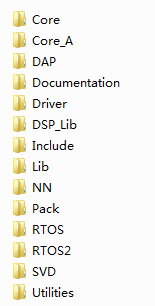
Core Cortex-M处理器内核和外设的API。 它为Cortex-M0,Cortex-M0 +,Cortex-M3,Cortex-M4,Cortex-M7,Cortex-M23,Cortex-M33,SC000和SC300提供了标准化接口。 还包括用于Cortex-M4,Cortex-M7和Cortex-M33 的SIMD指令。当前这个文件下只有一个示例文件,还用不上。
9 F) ~0 A+ W, B/ ^ s2 A, g
Core_A 同上,只是用于Cortex-A5/A7/A9。 % ]% u: D& l+ P8 z" m) k
DAP 这个是ARM官方推出的下载器固件,也就是大家所说的CMSIS-DAP下载器。
. l+ U, ]$ M: { r; n9 P
Documentation 这个是CMSIS软件包的Help文档,打开后效果如下:
" V$ }- I7 [# M2 J( I5 a M) W

Driver 这个是ARM做好的驱动框架,支持的外设如下: 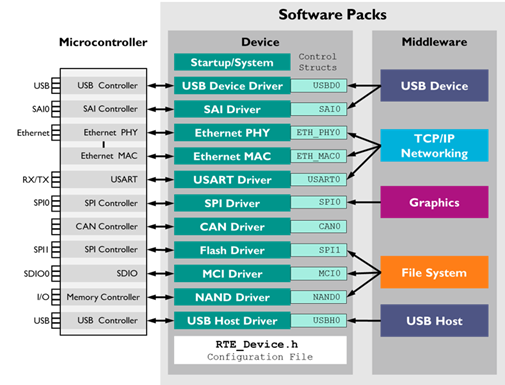
针对不同厂商,ARM会出一个完整的驱动包,比如STM32H7系列,在MDK安装目录的此路径下(前提是大家安装了STM32H7软件包):ARM\PACK\Keil\STM32H7xx_DFP\2.1.0\CMSIS\Driver。 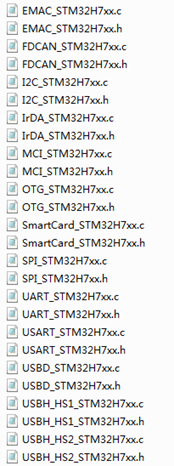
ARM做的这个驱动跟HAL库有什么区别呢?ARM做的这个库要调用到HAL的一些API,然后封装了一些比较好用的API,方便用户调用。 8 K. W; I# C/ R7 ~$ b
DSP_Lib 这个是ARM提供的DSP库,此库支持以CM0、CM3、CM4以及CM7为内核的所有MCU,含源码。
$ j3 x0 {3 a. B+ |0 T
Include 这个文件比较重要,虽然是头文件,但是封装了很多内核方面的API,是大家工程里面务必包含的路径。 $ V; o1 }2 R- j$ w* `
Lib 这个文件是GCC和MDK格式的DSP库文件。 & c4 {5 H) h6 h
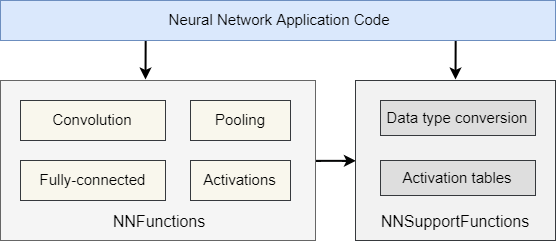
NN 这个是ARM新出的神经网络库,框图如下:
2 j/ i3 V, W9 H1 i
Packs 这个文件没什么用,大家不用管。 " A# E7 l }: e" g0 m: @9 J# {6 R0 |
RTOS 这个是RTX4以及CMIS-RTOS V1封装层,含源码,免费,Apache-2.0授权。 % s" b) Z$ f% L( {. v9 \' A
RTOS2 这个是RTX5以及CMIS-RTOS V2封装层,含源码,免费,Apache-2.0授权。 & {4 Q0 b: X! l+ i7 L7 E
SVD SVD的全称是System View Description,系统视图描述。对芯片的外设、存储器等进行了详细描述,编译器要用到这个文件,不同系列芯片有不同的SVD文件。以STM32H7为例,在MDK的option选项里面可以看到以svd为后缀的文件被调用。 0 i# ?, a! N* T. n/ n0 T& Y, o) q

Utilities 这个文件里面提供了一些实用的小软件或者文件。
2 Q4 y& |7 C: L, n0 O4 l关于CMSIS软件包就为大家介绍这么多,后面用到哪个文件时,再为大家详细介绍。 ' c C. e# d' j/ p
1.7 STM32CubeMX开发平台STM32CubeMX是ST在2014年推出的图形开发软件,方便用户配置时钟、外设、引脚以及RTOS和各种中间件。整体框图如下: 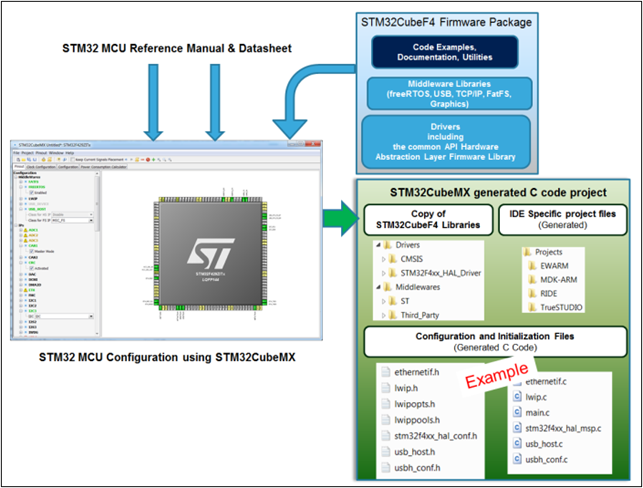
通过这个图形软件,可以让大家方便地生成工程代码,支持MDK,IAR,TrueSTUDIO等编译器。针对STM32CubeMX的使用,后面会专门做几期专题教程。 + t; } {1 l0 I# N
1.8 STM32H7调试方法STM32H7的调试方法主要分为两大类: 1、MDK和IAR编译器自带的调试 MDK调试方法在第5章进行了详细讲解。 IAR调试方法在第7章进行了详细讲解。 2、终极调试组件Event Recoder的使用方法。 在8章节进行了详细讲解。
e! X9 D" ~1 A% r
1.9 STM32H7出现硬件异常的解决办法大家做项目时,经常会遇到硬件异常问题,所以专门为此做了一个章节(具体在11章节进行了详细讲解)。
, |0 J) F! B- a. X
1.10 总结本章节就为大家讲解这么多,建议初学者花些时间对 STM32H7的开发文档的章节结构了解一下,随着以后的学习最好可以达到熟练查看这些开发文档的程度。 . q3 K' }( ~6 u: {
. h9 q4 O/ v6 s2 u8 d; R; s5 f | .png) STMCU小助手
发布时间:2021-12-25 10:45
STMCU小助手
发布时间:2021-12-25 10:45