1、什么是CAN
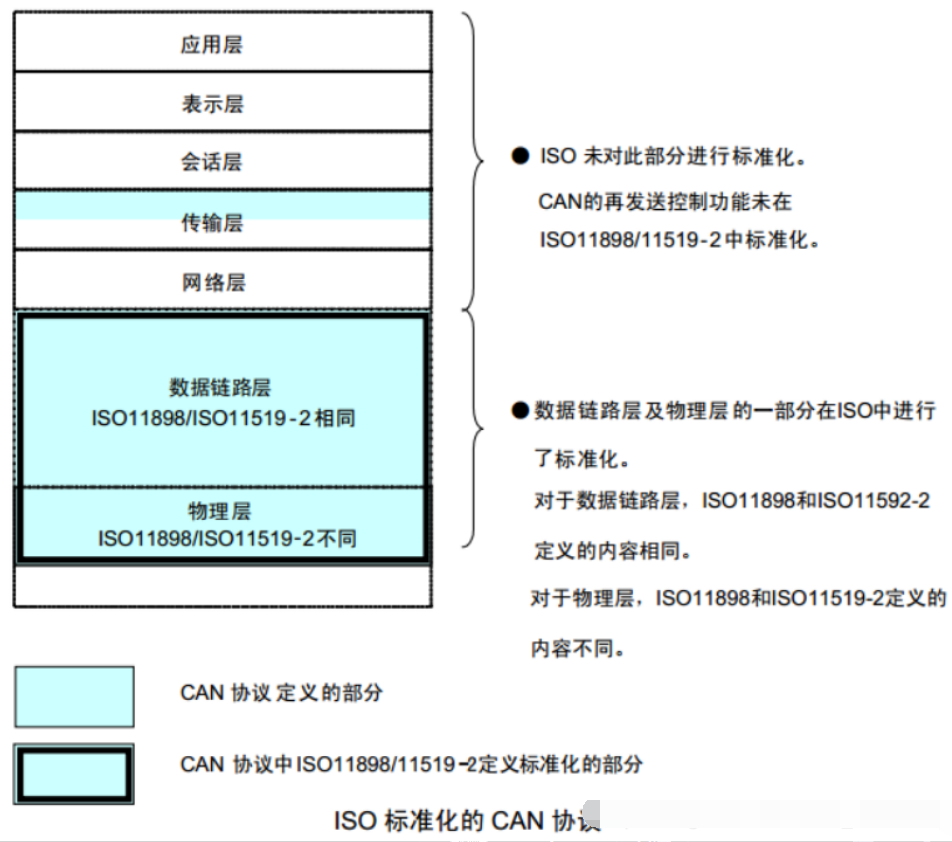
2 B5 ]3 _, G ~+ x0 }! w8 z' v CAN是Controller Area Network 的缩写(简称称CAN),是ISO国际标准化的串行通信协议。由德国电气商博世公司在1986 年率先提出。此后,CAN 通过ISO11898 及ISO11519 进行了标准化。现在在欧洲已是汽车网络的标准协议。ISO11898是针对通信速率为125Kbps~1Mbps的高速通信标准,而ISO11519-2是针对通信速率为125Kbps以下的低速通信标准。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。
1 z2 S5 O; _# f3 c- W# g# v3 e/ N2 v& C) n6 }- d
CAN 控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。具有很高的可靠性,广泛应用于:汽车电子、工业自动化、船舶、医疗设备、工业设备等方面。
3 i; V. D5 y& E# N/ ` @$ \
5 A1 }( H4 H4 D1 m
R$@(AS~3Y~ABOSVG`XZ(5.png") 6 F5 E# F9 F& v; ]0 `) Z+ p
6 F5 E# F9 F& v; ]0 `) Z+ p
1 i0 q4 g; f1 N% u5 g8 @
2、CAN协议的特点
4 ~0 O! P0 n) ~/ H7 K ①多主控制。
5 p K0 x& |& k* r3 X4 _; `2 r
$ V2 s9 o; R8 i( q ? ②系统柔软性。
8 g1 N! Z5 r$ I* O5 ~5 Z( e8 w6 u: |! }. K- P8 I5 b7 v2 z; {8 B! p
③ 速度快,距离远。
- u# @7 ~% a. S$ r5 b
. O0 s3 N, t1 U ④ 具有错误检测、错误通知和错误恢复功能。$ N4 m1 b/ |6 Y
' p. j( ^$ I+ N5 C0 x! \5 G ⑤ 故障封闭功能。* c+ a2 u0 z3 x4 ]8 y2 u
; X6 g+ F+ r, x3 o8 B
⑥连接节点多。
. U8 Y N5 |, M- [! l$ r
: b. R2 d6 n+ u9 w, S3 {3、ISO11898标准下的物理层特征/ }: R) Y N! p/ U5 F) K8 e+ G
CAN 控制器根据CAN_L和CAN_H上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。
- s, x1 v# B! `) j' z' C
. [/ v. {5 B" H8 Y7 L 显性电平对应逻辑:0,CAN_H和CAN_L之差为2.5V左右。
u2 Y. |$ ^! u: ?" Q8 e x3 L F# G. Y4 P) G. p+ O
隐性电平对应逻辑:1,CAN_H和CAN_L之差为0V。0 D/ J' C) _& H# y# H4 ]
0 C. q m& h* e
显性电平具有优先权,只要有一个单元输出显性电平,总线上即为显性电平。而隐形电平则具有包容的意味,只有所有的单元都输出隐性电平,总线上才为隐性电平(显性电平比隐性电平更强)。另外,在CAN总线的起止端都有一个120Ω的终端电阻,来做阻抗匹配,以减少回波反射。
: \0 h& l5 L8 X% F
5 \8 W1 G' Z. ^: e4 V z) Z

1 _; n9 d; t; m6 d$ J0 g
: Z8 \! o8 t: s) _% N4、CAN 协议的5 种类型帧
6 Y, u M+ z% D9 E- |5 R% q) H
( R% ?7 g/ x. u$ i% d
 4 a! O8 L0 ]) P& h" [0 h8 R5 Y' a
4 a! O8 L0 ]) P& h" [0 h8 R5 Y' a
- i, q$ ?# [( K; N其中,数据帧和遥控帧有标准格式和扩展格式两种格式。) }; J. E$ y$ c* d2 K0 D3 }9 l4 U
! S0 m0 H; I; G! k; M$ x* e& B
标准格式有11 个位的标识符(ID),扩展格式有29 个位的ID 。
% K- b" T3 \. r7 x: A7 q5 J3 i s9 l c0 |( Z
其中,最常用,也是最复杂的是数据帧,接着就看看数据帧: q+ V9 k, q: ^9 W4 o
% G2 _5 I l; \- t; T. T9 w' P7 l数据帧一般由 7 个段构成: E% r! H: k- \. u9 S! p' m
# m4 P+ S3 h+ x6 o3 f6 @( n* C
(1) 帧起始。表示数据帧开始的段。+ R8 W7 T, t) q Q1 o
(2) 仲裁段。表示该帧优先级的段。
! o: ~% w* {. H0 L! ^5 d' Q: p(3) 控制段。表示数据的字节数及保留位的段。
; y/ L5 G6 w6 k(4) 数据段。数据的内容,一帧可发送 0~8 个字节的数据。9 o1 v P8 u5 F. X
(5) CRC 段。检查帧的传输错误的段。# W* ?0 R# h- D9 O% _4 x. z
(6) ACK 段。表示确认正常接收的段。
+ T2 _7 p9 J; o$ i(7) 帧结束。表示数据帧结束的段。
R# P7 Y; [5 q; Z3 @6 n3 s1 X; O) r$ A( J2 g
![~A5_U[81UV8]~5SJIFJF9TG.png](data/attachment/forum/202205/16/112742jbr029gxdzb2gxvr.png "~A5_U[81UV8]~5SJIFJF9TG.png")
. x8 x* d2 b' n: ^* Q: B# R6 x Z+ }4 P1 ?# g% Z5 _8 g
4.1、总线仲裁介绍3 a# q$ r! U4 u! h7 s- A8 S6 _3 B
同时多个单元发送数据时,总线仲裁过程:% b7 y3 }# D: J/ S
, L" J$ j7 w j) O
IDI{7Z@DSA615FA8)E.png")
3 S, k, v3 i2 v% R- t6 ] x/ D9 D4 N) `* |
上图中,单元 1 和单元 2 同时开始向总线发送数据,开始部分他们的数据格式是一样的,故无法区分优先级,直到 T 时刻,单元 1 输出隐性电平,而单元 2 输出显性电平,此时单元 1仲裁失利,立刻转入接收状态工作,不再与单元 2 竞争,而单元 2 则顺利获得总线使用权,继续发送自己的数据。这就实现了仲裁,让连续发送显性电平多的单元获得总线使用权.
& g! t' I! q" O& }3 w! n2 o6 G' y: B, `/ B
规律:
4 O$ S8 q% k! p5 |8 G
0 `5 J4 Z5 F% q Z 1,总线空闲时,最先发送的单元获得发送优先权,一但发送,其他单元无法抢占。
5 i- A c7 m" w, _& c% D7 g) R: d# `& `' S
2,如果有多个单元同时发送,则连续输出显性电平多的单元,具有较高优先级。9 W+ v$ P" P' z5 S& H6 m
/ H6 k7 Y& O4 B) s3 j' U4.2、位时序
4 i5 ?8 p; Q% O 位速率:由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。一个位一般可以分为如下四段:) v' w, m8 f% E; L
7 ^; I, m- E" M; I/ q' @) E 同步段(SS)
! e$ r. N! Y+ W' o& P 传播时间段(PTS)" B5 _' ~8 _! N* K1 f4 A
相位缓冲段 1(PBS1)
. Y# i7 \3 I7 _+ W! K 相位缓冲段 2(PBS2)/ q( l1 w/ N+ i" c4 o( w; c
' Q" c4 n* J0 @$ u- r 这些段又由可称为 Time Quantum(以下称为 Tq)的最小时间单位构成,1 位分为 4 个段,每个段又由若干个 Tq 构成,这称为位时序。6 q+ v6 L! Y1 W7 j6 j
: c7 d5 [. `" G! T- e2 } m+ R) A 位时间=1/波特率,因此,知道位时间,我们就可以知道波特率1 位由多少个 Tq 构成、每个段又由多少个 Tq 构成等,可以任意设定位时序。通过设定位时序,多个单元可同时采样,也可任意设定采样点。各段的作用和 Tq 数如表所示:2 o& O4 i: u; x. s
& z3 \5 A; i0 ]9 P, B

9 C1 [. V8 j& ]# b6 ]1 l
/ f7 @- e x, O1 个位的构成如图所示:) U5 _# [+ u7 @8 `
; }/ s. [$ a/ }, A, M* e5 e
![%QR7Z1KPF)9]}7_HZ)]IH78.png](data/attachment/forum/202205/16/112743f117516p7aw1ztn8.png "%QR7Z1KPF)9]}7_HZ)]IH78.png") 1 Q# {4 o- H1 _7 T
1 Q# {4 o- H1 _7 T
: `$ n1 I \& g1 E上图的采样点,是指读取总线电平,并将读到的电平作为位值的点。位置在 PBS1 结束处。根据这个位时序,我们就可以计算 CAN 通信的波特率了。图中采样时间加大或减少量的最大值就是SJW。
5 c B9 I4 _0 [5 u) ^* @( I9 x) |) V; i( I1 ^0 Y* s* h
5、STM32 CAN控制器简介
2 q' Y3 m( Q8 C- _6 ~; \# {& h STM32F4 自带的是 bxCAN,即基本扩展 CAN。它支持 CAN 协议 2.0A 和 2.0B。它的设计目标是,以最小的 CPU 负荷来高效处理大量收到的报文。它也支持报文发送的优先级要求(优先级特性可软件配置)。对于安全紧要的应用, bxCAN 提供所有支持时间触发通信模式所需的硬件功能。3 l L* T( [, l% p/ {. V* ~
STM32F4 的 bxCAN 的主要特点有:
/ W3 b( b# }) |$ G) L ①支持 CAN 协议 2.0A 和 2.0B 主动模式% ]5 B+ {. r4 s# u; e9 T) M! D
②波特率最高达 1Mbps
9 {% [7 k6 f; \& b ③支持时间触发通信
& @4 o* K& M$ X8 H% E6 `5 K- v ④具有 3 个发送邮箱" c9 z# g" k) `- G" t& u% h
⑤具有 3 级深度的 2 个接收 FIFO
+ a# S" B1 d0 t ⑥可变的过滤器组(28 个, CAN1 和 CAN2 共享)
( c7 U! v" K0 ^' c7 Q' W
5 w% N) I2 [( |/ f. b* }
16~{@VDJYEVZN9IKG(T%H.png") 0 A2 T& T% {- d4 z, V: h, \
0 A2 T& T% {- d4 z, V: h, \
F2 u9 j. a- Q
5.1、标识符筛选器
1 H0 T. ^0 V( [. h+ QCAN的标识符不表示目的地址而是表示发送优先级。接收节点根据标识符的值,来决定是否接收对应消息。3 o* M' I" e8 q: Y
STM32 CAN控制器,提供了28个可配置的筛选器组(F1仅互联型才有28个,其他的只有14个),可降低CPU处理CAN通信的开销。# F$ @7 l# ~3 }0 B, R
STM32 CAN控制器每个筛选器组由2个32位寄存器组成(CAN_FxR1和CAN_FxR2,x=0~27)。根据位宽不同,每个筛选器组可提供:
) K9 {" j% V4 P( b$ T% A ● 1个32位筛选器,包括:STDID[10:0]、EXTID[17:0]、IDE和RTR位
; @+ d$ Y4 E/ h! c" B. F% U
8 |0 K. ^3 C' f/ e7 z( l ● 2个16位筛选器,包括:STDID[10:0]、IDE、RTR和EXTID[17:15]位
m' O1 u* S* Q3 Y# H* P J$ W' H
4.筛选器可配置为:屏蔽位模式和标识符列表模式。8 f& F8 y' \1 K4 D3 l
, x% i9 B) i c, V) \
在屏蔽位模式下,标识符寄存器和屏蔽寄存器一起,指定报文标识符的任何一位,应该按照“必须匹配”或“不用关心”处理。
) \& ^; H& |2 Z/ e$ x- |7 s5 z1 Q# t+ b
在标识符列表模式下,屏蔽寄存器也被当作标识符寄存器用。因此,不是采用一个标识符加一个屏蔽位的方式,而是使用2个标识符寄存器。接收报文标识符的每一位都必须跟筛选器标识符相同。' }6 g9 P5 U9 [* _7 z' M$ W% J
' p3 _) W/ l+ J. P# o/ o( J
 4 M* I4 U4 S* z2 h& [$ V
4 M* I4 U4 S* z2 h& [$ V
$ s/ y! C# c; m7 b5 n# M4 D3 c y为了过滤出一组标识符,应该设置筛选器组工作在屏蔽位模式。
H. K4 L2 ~) w3 ~; e" ]0 k+ D9 i为了过滤出一个标识符,应该设置过滤器组工作在标识符列表模式。
: X0 Z' l2 B7 B' a' y$ P应用程序不用的筛选器组,应该保持在禁用状态(通过CAN_FA1R设置)。* m- p1 R* @. U) L
筛选器组中的每个筛选器,都被编号为(即:筛选器编号)从0开始,到某个最大数值-取决于筛选器组的模式和位宽的设置。
) Q2 X. Q# n; c% c通过CAN_FFA1R的设置,可以将筛选器组关联到FIFO0/FIFO1: V$ j5 \( k. h" I/ j, V2 \* R
5.2、STM32 CAN模式, y3 @$ m- |: s( }
1)工作模式
) f4 o( p9 ~- x% g% Q+ a% k, b4 V! e5 f, i% o
①初始化模式(INRQ=1,SLEEP=0). A1 ^$ E$ }; [1 W4 b0 }% H
: e8 w9 M( V h. y2 x G
②正常模式(INRQ=0,SLEEP=0)
2 ?/ M- R+ {% ^9 g% i4 f
& s) h3 e) \$ B/ _7 m$ {- L! z ③睡眠模式(SLEEP=1)( N" n4 p+ e! G O
, c9 O/ t% W* h/ W$ Q% E
2)测试模式
% o' n; O) N- Q% C# q( i$ ~3 s* x: j' r" i" p! [
静默模式( LBKM=0,SILM=1 )
: M5 v" C; ` D7 Y+ y5 J8 D* o/ o; s$ M+ m1 q& g. i* s$ s

$ Q( r' f$ u3 @( l/ d- R' I6 Y1 r% {/ T# _5 d1 h
环回模式( LBKM=1,SILM=0 )
! R% P) U, \1 J* L! \% B( q U7 S0 Q) e" B

5 `, l7 s: o8 n! u( \, Q7 G, \8 U% T* o( }! J1 i7 F
环回静默模式(LBKM=1,SILM=1)0 r9 E& ~' p! G
7 T3 P; i( ~) ^: y8 i! M$ E3 z# ]; V
WACIRR[N.png") 1 i$ v7 g4 _5 v4 v$ W7 K d; \0 z
1 i$ v7 g4 _5 v4 v$ W7 K d; \0 z
5 q/ n3 g8 u5 B! [3 e/ L2 a3)调试模式
, z) K% r% B# M" D' Q, l
/ ]$ f v' P; t$ a0 V5.3、STM32 CAN发送流程
. g7 |; \& P4 }5 A& j CAN发送流程为:
; D, ]8 G+ l2 J1 c# g
* F' X3 T4 b1 ?0 K1 b3 A1 ] 程序选择1个空置的邮箱(TME=1)--->设置标识符(ID),数据长度和发送数据--->设置CAN_TIxR的TXRQ位为1,请求发送--->邮箱挂号(等待成为最高优先级)--->预定发送(等待总线空闲)--->发送--->邮箱空置。: g% {- ?' o- w1 x: i
( }' p% h$ O v) R3 b9 C' O" T
还包含了很多其他处理,终止发送(ABRQ=1)和发送失败处理等
7 c0 J& ~0 v7 f' C4 Z) T/ z
: v2 `6 A% Y% w2 L0 a
![]H1Q8B)[T86KV_74XRMXFDP.png](data/attachment/forum/202205/16/112745fb71rb7k7rc2tn4y.png "]H1Q8B)[T86KV_74XRMXFDP.png")
4 H9 K/ X% c2 C6 h5 y2 j$ o- E
% @! T9 ]4 j& U+ Y; u' E5.4、STM32 CAN接收流程$ z- ~, ]2 R% l
CAN接收流程为:
- q$ ]4 ~5 }9 h2 K- s: w! u) F: s0 J X3 {) n- G0 X
FIFO空--->收到有效报文--->挂号_1(存入FIFO的一个邮箱,这个由硬件控制,从而节省了 CPU 的处理负荷,简化了软件并保证了数据的一致性)---->收到有效报文---->挂号_2---->收到有效报文---->挂号_3---->收到有效报文à溢出。
3 W4 O- G" u# v/ Z* L) [: q; K
, f1 Z, v, n( j/ H8 s5 E' w! J CAN收到的有效报文,存储在3级邮箱深度的FIFO中。FIFO接收到的报文数,我们可以通过查询CAN_RFxR的FMP寄存器来得到,只要FMP不为0,我们就可以从FIFO读出收到的报文。
$ N- \9 z, ?5 \, Z1 f4 {; K2 E
( v5 H+ W9 |9 c 报文FIFO具有锁定功能(由CAN_MCR,RFLM位控制),锁定后,新数据将丢弃,不锁定则新数据将替代老数据7 Z9 i1 l7 u6 f. e& U* m
1 g# p, J' S' ?- m5 U% X+ V
![Z{NCPU77TQBGI%J$%]XO[XU.png](data/attachment/forum/202205/16/112746wdxexde24dxzdpff.png "Z{NCPU77TQBGI%J$%]XO[XU.png") ! {' m" y4 u, d
! {' m" y4 u, d
" B* y# q6 P# r4 p5.5、STM32 CAN位时序
5 B% ?4 M' {4 |+ w7 O2 ^ STM32F4 把传播时间段和相位缓冲段 1(STM32F4 称之为时间段1)合并了,所以 STM32F4 的 CAN 一个位只有 3 段:同步段(SYNC_SEG)、时间段 1(BS1)和时间段 2(BS2)。 STM32F4 的 BS1 段可以设置为 1~16 个时间单元,刚好等于CAN的传播时间段和相位缓冲段 1 之和。
/ K: S$ Z' A; V( y+ r( C* j7 b+ K+ Y2 K/ K) a9 S
@KRRV56{DVXE1BBK895T.png") 5 J9 C: z& h. l; ~3 ?) i. d
5 J9 C: z& h. l; ~3 ?) i. d
6 L9 G3 j4 | B% a& G/ M* F
图中还给出了 CAN 波特率的计算公式,我们只需要知道 BS1 和 BS2 的设置,以及 APB1的时钟频率(一般为 42Mhz),就可以方便的计算出波特率。) \& e# Q6 e7 f6 r3 c
% \. Q5 E+ {9 H& S: i7 r5 f
比如:" _$ T: h; o3 |9 Z0 z) X0 D
3 ]" U1 U+ B% m, V$ j STM32F103,设TS1=8、TS2=7、BRP=3,波特率=36000/[(9+8+1)*4]=500Kbps。: c5 Z/ n2 ]1 W% F; p5 Q' y
0 W1 y) E% O* K( z) {4 v' j+ q STM32F407,设TS1=6、TS2=5、BRP=5,波特率=42000/[(7+6+1)*6]=500Kbps。
& d( f5 z; ^# j$ _1 X* M+ @
: ?4 W# v1 {5 A1 y3 d: E3 H6、参考代码, G5 K% f9 j/ ]7 ]; h3 m% W
- #include "can.h"
+ |- H, t. e2 z1 j/ [8 M, t - #include "delay.h"
) U; E' k. z+ ^6 }6 A- K. s1 G - #include "usart.h"3 V5 l* c8 S: v M. K3 Y% r
- 8 S% M& C8 t- f/ g, F. Z
- u8 CAN1_Mode_Init(u8 tsjw,u8 tbs2,u8 tbs1,u16 brp,u8 mode)
& `: T# Y2 y4 Q4 p8 m6 S7 s - {. m- O/ F1 G5 t: K; G, r
- GPIO_InitTypeDef GPIO_InitStructure;. a7 H2 U* ^1 z: W
- CAN_InitTypeDef CAN_InitStructure;9 b q. n) _/ M8 j7 L) i9 W
- CAN_FilterInitTypeDef CAN_FilterInitStructure;
5 |7 X0 O5 T0 \. L, F* G4 A5 l - $ y- X3 i+ z! R! v7 W$ }0 j
- RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);. R$ E) J0 ^) r ^# H- `* K
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
, h4 x% ^/ H3 [- e: q - 3 u- N5 J q3 Y: F+ ~
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11| GPIO_Pin_12;2 W# ?+ @5 {" V: {
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;6 T9 Z8 f0 `( ^/ F" b- i
- GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;& f3 o" _1 p9 S. d4 A
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;* _% d0 [; v. o
- GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;" k' y/ J6 S7 i' X
- GPIO_Init(GPIOA, &GPIO_InitStructure);- K! \- K( M7 ~* f: v% [6 h
- ) ~6 J) [1 V8 X) ]3 x V3 E1 _
- GPIO_PinAFConfig(GPIOA,GPIO_PinSource11,GPIO_AF_CAN1);# B7 I% a% M5 I$ e" N2 K3 @
- GPIO_PinAFConfig(GPIOA,GPIO_PinSource12,GPIO_AF_CAN1);
) Y) R/ K1 x" Q$ U% H- m -
, Q* e4 ?+ E5 N- Z - CAN_InitStructure.CAN_TTCM=DISABLE; ?6 `' g. n5 j$ J% E
- CAN_InitStructure.CAN_ABOM=DISABLE;
( e& j6 L0 Z/ z+ H& g+ l - CAN_InitStructure.CAN_AWUM=DISABLE;$ U. f: [: U/ Y* i0 V; J, R
- CAN_InitStructure.CAN_NART=ENABLE;7 W Y Z- M1 L/ B# l
- CAN_InitStructure.CAN_RFLM=DISABLE;. G o* d* G+ e( `
- CAN_InitStructure.CAN_TXFP=DISABLE;/ f* {) E* g. l) h- Z2 }
- CAN_InitStructure.CAN_Mode= mode;( o8 Y' a V/ A; W5 \6 a9 y
- CAN_InitStructure.CAN_SJW=tsjw;5 }0 R, N8 K( B/ M Z+ K
- CAN_InitStructure.CAN_BS1=tbs1;
( v. m) t5 @$ M1 T - CAN_InitStructure.CAN_BS2=tbs2;
3 `6 ^* T$ P8 A- G - CAN_InitStructure.CAN_Prescaler=brp;8 r% x- j! N+ w7 m
- CAN_Init(CAN1, &CAN_InitStructure);) e" {3 F" x" ~- t$ Y4 Y7 i4 U f
) \* b8 W/ G/ t7 E: }" T- CAN_FilterInitStructure.CAN_FilterNumber=0;
]) M$ Q! n7 S" q - CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;
; g3 b& M- Z" x0 M# N- [, s; F - CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit;8 t: Q z8 i: S6 e
- CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;( [0 r% Y- R% `+ L& Z
- CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;5 W v$ s9 U9 L* Y2 V
- CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;
+ \# D9 Z! B/ ^. Z* S - CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;8 \( c( N4 l2 J) b
- CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;6 G0 F; U* D$ O; A& f& a- |
- CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;
z# I8 S5 ?, }* _$ z - CAN_FilterInit(&CAN_FilterInitStructure);0 K( q5 m, v6 @+ T) S
-
: C9 b* @ I1 ?7 p - CAN_ITConfig(CAN1,CAN_IT_FMP0,ENABLE); / f! z+ p% G4 y( h; D( ]# @
- + {( ?' u8 J7 C/ x
- NVIC_InitStructure.NVIC_IRQChannel = CAN1_RX0_IRQn;6 b% t3 m" ~( q5 F
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
0 ^. Q, V* c- z - NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
' \. G0 G( s* ]& F4 r/ z: x4 t - NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
' V8 W5 F, \4 L% M1 O j - NVIC_Init(&NVIC_InitStructure);
( w4 }9 ?, A1 P: Q - , q- g+ l5 [( }
- return 0;1 p/ S4 {4 i5 _' M, N" T: V
- } : u" X5 m7 T( ?# `0 T3 y. l
- ' w3 H5 v* c) F8 X% ]" d) \9 D
-
+ P0 K0 v6 u6 R/ F i% ` - void CAN1_RX0_IRQHandler(void): v8 i" m' ]1 |7 Y
- {5 |4 P% g8 U J7 y* k2 ^4 l# C4 x
- CanRxMsg RxMessage;
! p& ?8 ~* _, Y& ] - int i=0;
3 j' @8 |, E- L* h( [0 G2 m) ]( K - CAN_Receive(CAN1, 0, &RxMessage);
" \0 A* w2 r) D. N0 x( F; [, Z! p - for(i=0;i<8;i++)7 x0 m: @: \2 l! R7 C% Z
- printf("rxbuf[%d]:%d\r\n",i,RxMessage.Data<i>);
% n. k9 f6 d8 d. J1 e7 w - }6 P8 w0 Y. t( y0 P
- ) L) j- c9 F/ b4 {
9 B3 ?& a) x' L: N* {0 _0 c# y- u8 CAN1_Send_Msg(u8* msg,u8 len)" b' b8 D1 P1 z7 s* W$ `
- {
2 C; d0 B" a/ a1 c - u8 mbox;
+ y9 C1 p4 O( m( V" e. B; `; u - u16 i=0;! Q( w/ Z& L# j
- CanTxMsg TxMessage;. s2 b' q0 v: D( b& B" `
- TxMessage.StdId=0x12; 4 i% d& Q- G2 o0 Z" D
- TxMessage.ExtId=0x12;' f. R9 i! T, [
- TxMessage.IDE=0;
: p# N4 Y2 Z0 D# L( z0 c - TxMessage.RTR=0;
3 V1 o9 h \3 v, N8 G u) U' t - TxMessage.DLC=len;
; i, E6 p+ `& _( f. U% s" W4 @ - for(i=0;i<len;i++)7 i; g- r5 b+ R) [3 b$ J
- TxMessage.Data<i>=msg<i>; 2 ?5 D$ C: Z% e! {' E' c
- mbox= CAN_Transmit(CAN1, &TxMessage);
' y3 C( P' H8 E. B- i+ U+ } - i=0;5 j* ~- |. i! U/ ], c& j* O
- while((CAN_TransmitStatus(CAN1, mbox)==CAN_TxStatus_Failed)&&(i<0XFFF))i++;. p4 g0 {' S( K2 q/ k
- if(i>=0XFFF)return 1;$ X3 W( k7 D- j* S7 i* v
- return 0;
* h' D3 w" W3 p& p2 h ] - & V8 |& T. I: ]+ _
- }
% u& W# U# \ [% |! p - : @( k1 v7 x2 I3 n
- u8 CAN1_Receive_Msg(u8 *buf)! h5 f% v+ O. v1 H2 w4 Z+ z
- { - y% X2 g) M) r" d9 A
- u32 i;
) V* B( K. W/ i: R. F - CanRxMsg RxMessage;! N/ V! P7 n I
- if( CAN_MessagePending(CAN1,CAN_FIFO0)==0)return 0;
/ \# p& w8 T" o+ g Z5 A0 v; h - CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);0 S! e& ]! L6 P) P1 r
- for(i=0;i<RxMessage.DLC;i++)
1 F I. {- r# V2 X+ L. @* @ - buf<i>=RxMessage.Data<i>; 2 g `/ U- J' M( _
- return RxMessage.DLC;
& q4 V! ]! z' L- ], H+ b - } N3 x- r0 |/ l0 W8 _2 i+ t
- </i></i></i></i></i>
2 B Z& a) Y- o+ s- |& k
, y+ [9 A& C- x' a |
.png) STMCU小助手
发布时间:2022-5-16 11:26
STMCU小助手
发布时间:2022-5-16 11:26