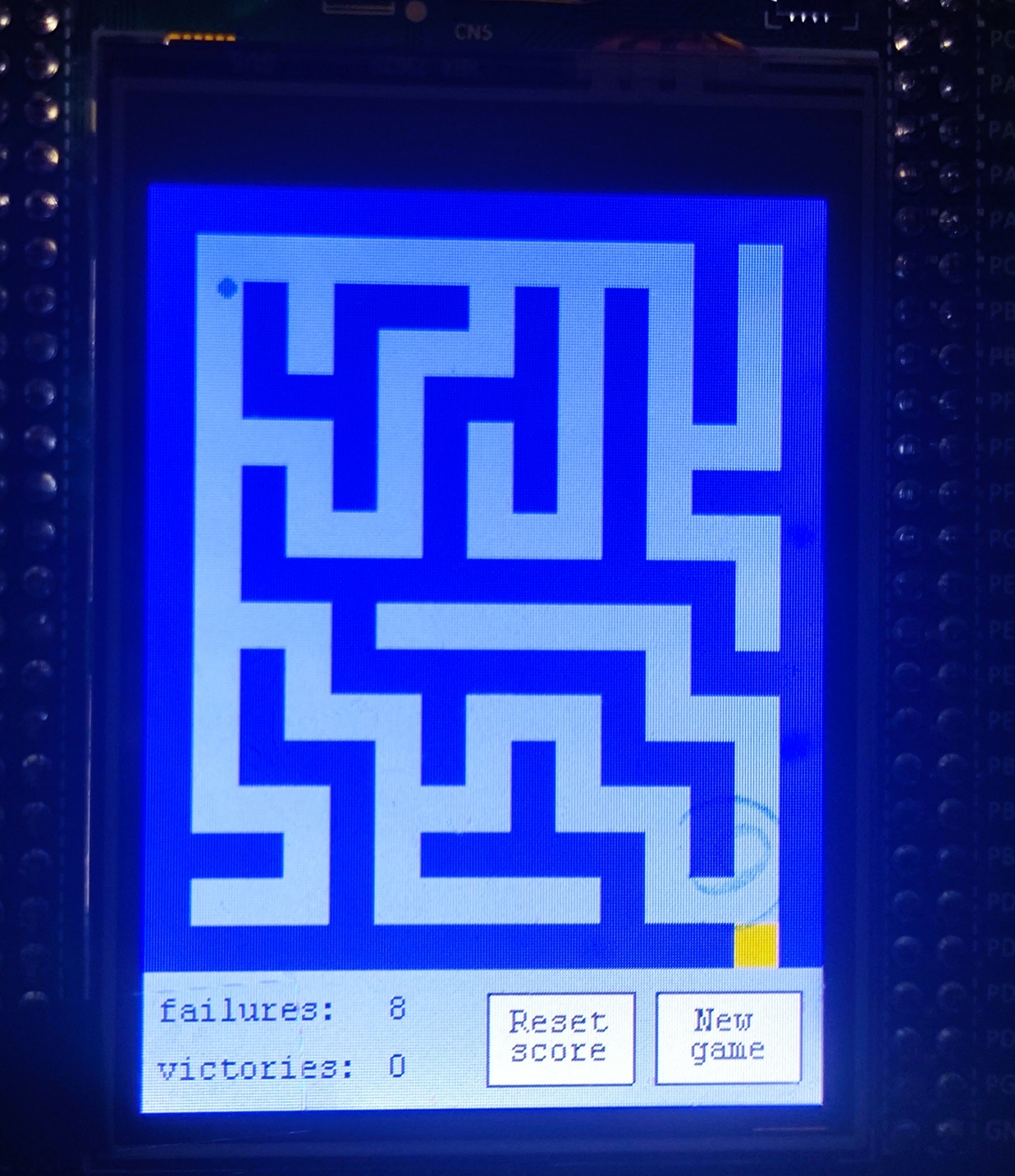
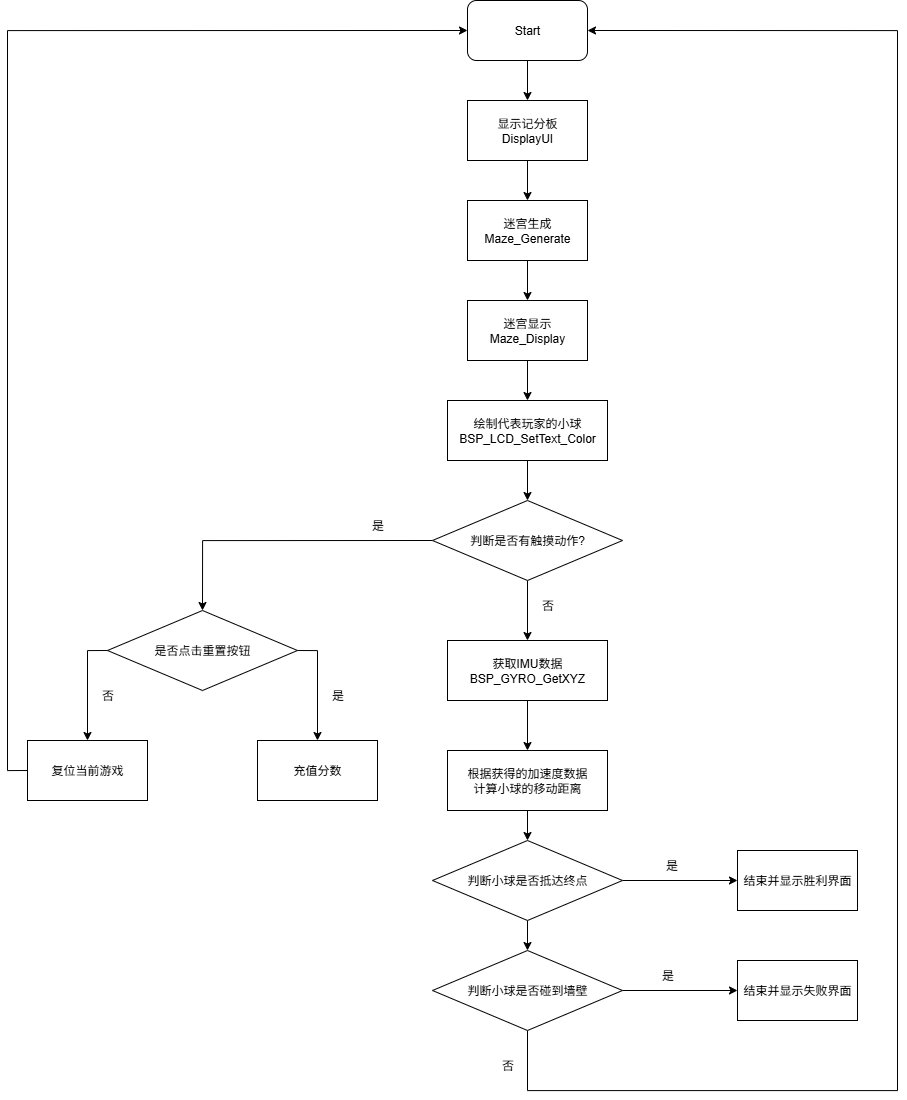
利用STM32F429Disco的角速度计l3gd20实现一个迷宫游戏,程序的功能框图如下。

STM32F429Disco有官方提供的BSP可供使用,利用CubeMX可以创建基于BSP的工程项目。
https://shequ.stmicroelectronics.cn/forum.php?mod=viewthread&tid=869338
以此为基础,添加迷宫地图生成、加速度计控制小球和小球碰撞检测的功能。
1、迷宫地图生成和显示
迷宫地图由网格构成,STM32F429Disco的屏幕分辨率为240x320。以16x16pixl大小的网格划分迷宫,可以设计一个15x17大小的迷宫。每个网格使用0或1表示该网格是否可以通行。在程序中以一个数据来表示迷宫的可通行属性。
int static maze[255];
迷宫地图的初始化、路径生成以及设定起点和终点的函数如下
void Maze_Generate(int array[], const int width, const int height, RNG_HandleTypeDef *hrng) {
int x, y;
/* Initialize the maze. */
for(x = 0; x < width * height; x++) {
array[x] = 1;
}
/* Carve the maze. */
for(y = 1; y < height; y += 2) {
for(x = 1; x < width; x += 2) {
Maze_Carve(array, width, height, x, y, hrng);
}
}
/* Set up an entry and an exit. */
array[16] = 0; //Maze entry
array[(height - 1) * width + (width - 2)] = 0;
}
void Maze_Carve(int maze[], const int width, const int height, int x, int y, RNG_HandleTypeDef *hrng) {
int x1, y1;
int x2, y2;
int dx, dy;
int dir, count;
uint32_t generatedNumber;
HAL_RNG_GenerateRandomNumber(hrng, &generatedNumber);
dir = generatedNumber % 4;
count = 0;
while(count < 4) {
dx = 0; dy = 0;
switch(dir) {
case 0: dx = 1; break;
case 1: dy = 1; break;
case 2: dx = -1; break;
default: dy = -1; break;
}
x1 = x + dx;
y1 = y + dy;
x2 = x1 + dx;
y2 = y1 + dy;
if( x2 > 0 && x2 < width && y2 > 0 && y2 < height
&& maze[y1 * width + x1] == 1 && maze[y2 * width + x2] == 1) {
maze[y1 * width + x1] = 0;
maze[y2 * width + x2] = 0;
x = x2; y = y2;
HAL_RNG_GenerateRandomNumber(hrng, &generatedNumber);
dir = generatedNumber % 4;
count = 0;
} else {
dir = (dir + 1) % 4;
count += 1;
}
}
}
根据生成的数据,调用BSP中的LCD绘制图形的函数,绘制相应的迷宫地图。
void Maze_Display(const int maze[], const int width, const int height, const int rectangle_side_size, uint32_t color) {
int i, j, top_left_rectangle_pixel_X = 0, top_left_rectangle_pixel_Y = 0;
for(j = 0; j < height; j++)
{
for(i = 0; i < width; i++)
{
int debug = maze[j * width + i];
if(debug == 1)
{
LCD_Drawing_Rectangle(top_left_rectangle_pixel_X, top_left_rectangle_pixel_Y, rectangle_side_size, rectangle_side_size, color);
}
top_left_rectangle_pixel_X += rectangle_side_size;
}
top_left_rectangle_pixel_X = 0;
top_left_rectangle_pixel_Y += rectangle_side_size;
}
LCD_Drawing_Rectangle(208, 256, rectangle_side_size, rectangle_side_size, LCD_COLOR_ORANGE);
}
2、游戏流程
一局游戏开始时,设置游戏起点并绘制代表玩家的圆点。
int x_position = 25, y_position = 23;
BSP_LCD_FillCircle(x_position, y_position, 3);
通过调用BSP中读取角速度传感器l3gd20的数据,得到XYZ的速度信息,通过与对应的阈值进行对比,对小球在X与Y方向的位移进行调制,得到下一个位置的值。
float gyroBuffer[3];
float Xval, Yval, Zval = 0x00;
float sensitivity = 5000.0f;
int distance = 1;
while(1){
BSP_GYRO_GetXYZ(gyroBuffer);
Xval = gyroBuffer[0];
Yval = gyroBuffer[1];
Zval = gyroBuffer[2];
if (Xval > sensitivity && Yval < sensitivity && Yval > -sensitivity)
{
BSP_LCD_SetTextColor(LCD_COLOR_LIGHTBLUE);
BSP_LCD_FillCircle(x_position, y_position, 3);
y_position += distance;
BSP_LCD_SetTextColor(LCD_COLOR_BLUE);
BSP_LCD_FillCircle(x_position, y_position, 3);
if (BallHitTheWinningWall(x_position, y_position))
{
DisplayWinningScreen();
goto start;
}
if (BallHitTheLosingWall(maze, x_position, y_position, 3))
{
DisplayFailureScreen();
goto start;
}
}
....
Hal_Delay(20);
}
得到新的位置,通过与maze数据中存储的迷宫数据做对比,判断小球是否抵达终点。
bool BallHitTheWinningWall(int x_position, int y_position)
{
if (x_position >= 208 && x_position <= 224 && y_position >= 256 && y_position <= 272)
{
victories++;
return true;
}
return false;
}
bool BallHitTheLosingWall(int array[], int x_position, int y_position, int radius)
{
int32_t d;
uint32_t curx;
uint32_t cury;
d = 3 - (radius << 1);
curx = 0;
cury = radius;
while (curx <= cury)
{
if (CalculateIfCollisionOccurred(array, x_position + curx, y_position - cury) ||
CalculateIfCollisionOccurred(array, x_position - curx, y_position - cury) ||
CalculateIfCollisionOccurred(array, x_position + cury, y_position - curx) ||
CalculateIfCollisionOccurred(array, x_position - cury, y_position - curx) ||
CalculateIfCollisionOccurred(array, x_position + curx, y_position + cury) ||
CalculateIfCollisionOccurred(array, x_position - curx, y_position + cury) ||
CalculateIfCollisionOccurred(array, x_position + cury, y_position + curx) ||
CalculateIfCollisionOccurred(array, x_position - cury, y_position + curx))
{
failures++;
return true;
}
if (d < 0)
{
d += (curx << 2) + 6;
}
else
{
d += ((curx - cury) << 2) + 10;
cury--;
}
curx++;
}
return false;
}
bool CalculateIfCollisionOccurred(int array[], int x, int y)
{
int row = floor(x / 16);
int col = floor(y / 16);
if (!(array[row + 15 * col] == 1)) return false;
return true;
}
以上为利用STM32F429I-Disco的角速度计实现的迷宫游戏代码说明。






 微信公众号
微信公众号
 手机版
手机版










