.png) STMCU小助手
发布时间:2022-1-14 22:51
STMCU小助手
发布时间:2022-1-14 22:51
|
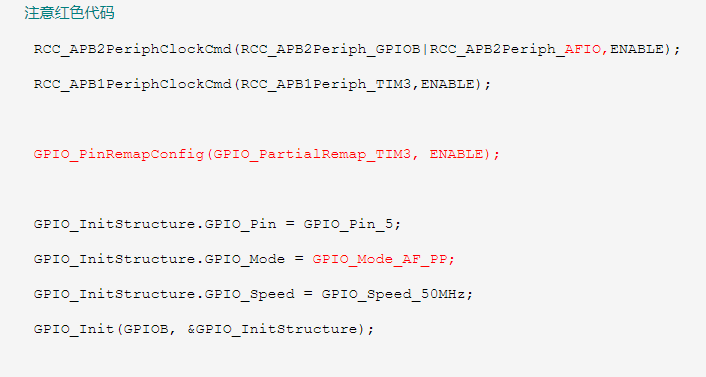
PWM、、英语好的人估计又知道这三个大写字母代表哪三个英语单词了、小弟不才,就说中文意思好了:脉冲宽度调制,玩过飞思卡尔的人估计对PWM非常的不陌生吧、电机驱动需要PWM,控制舵机的转向需要PWM,总之、可以说,PWM,you are so good。 STM32的PWM,就是由定时器产生的,但是奇怪的是除了定时器TIM6和TIM7不能产生PWM外,其他的定时器都可以产生,而且还有多路之分,“高级官员”TIM1和TIM8说:老子可以产生多达7路,而其他的定时器默默的哀伤,因为自己最多只能产生4路(四个通道)。 注:对于寄存器,本博客就不再深入的讲解,大家也可以参照STM32的参考手册,因为本博客讲解的是思路和用库函数,所以就不再细讲寄存器,请见谅 1、捕获/比较模式寄存器1(TIMx_CCMR1) 2、捕获/比较使能寄存器(TIMx_CCER) 3、捕获/比较寄存器2(TIMx_CCR2) 那好,我们该怎么利用定时器来产生PWM呢??再此之前,我们来了解产生PWM的背后那不为人知的秘密: 脉冲宽度调制模式可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。 在TIMx_CCMRx寄存器中的OCxM位写入’110’(PWM模式1)或’111’(PWM模式2),能够独立地设置每个OCx输出通道产生一路PWM。必须设置TIMx_CCMRx寄存器OCxPE位以使能相应的预装载寄存器,(请注意这句话!!!!)最后还要设置TIMx_CR1寄存器的ARPE位,(在向上计数或中心对称模式中)使能自动重装载的预装载寄存器。 在PWM模式(模式1或模式2)下,TIMx_CNT和TIMx_CCRx始终在进行比较,(依据计数器的计数方向)以确定是否符合TIMx_CCRx≤TIMx_CNT或者TIMx_CNT≤TIMx_CCRx。 所以,该寄存器的值一直与CNT比较,根据比较结果产生相应的动作,利用这里一点,我们通过修改这个寄存器的值,就可以控制PWM的输出脉宽了,(在这里有专门的库函数可以操作,所以是相当方便) 那怎么操作呢??在这里,我们通过一直没有提过的非常重要的概念:重映射,把TIM3_CH2的PA7重映射到PB5,而PB5是连接LED的,所以我们可以通过观察LED的亮度才体验PWM、、也难为了LED君,老是被观察,脸也不红下、、 所谓的重映射,就是把原本默认的引脚给诱惑到另一个引脚上,专业上给的是重映射,但是我觉得并非这么简单、果然,它还有一个功能:复用、、所以第一步: 我们要打开复用的时钟和把IO口设成复用推挽输出,当然也要打开TIM3的时钟,见代码:(映射有部分映射和全部映射,都有可用的函数,在这里我们是部分映射,但是,映射了一个引脚,另外的引脚也被牵扯下来了,哎)
接下来: 通用计时器的初始化:(请看代码:
接下来,就是PWM的重头戏了,在这里,我们要设置TIM3_CH2为PWM模式,(注意,由于TIM3可以产生四路PWM,每路都有不同的但类似的函数来控制)在这里,我们是通过 void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct)来实现的 打开"stm32f10x_tim.h"可以看到,在这里,我们只显示一些跟我们有用的参数: TIM_OCMode输出模式;—>PWM2 TIM_OutputState输出使能;—>使能PWM TIM_OCPolarity输出极性;—>极性为高 代码如下:
接下来,最关键的一步也是最容易遗漏的:就是使能预装载寄存器,在这里我们通过库函数 TIM_OC2PreloadConfig 使能或者失能TIMx在CCR2上的预装载寄存器 请看代码:
好了,最后一步,我们开启定时器TIM3,这个大家也不陌生了吧、、还是老规矩;知道的,来人,赏美女十个,还不知道的,拉出去调戏十分钟
亲、、在这里、、你觉得你能看到LED从暗到亮了吗??你想看,LED君还不肯呢、没错了、、但这是为什么呢?? 原因就是这里设置产生的PWN是固定脉宽的、、那我们怎么来改变它呢??咦、库函数为我们提供了这样的一个好机会: TIM_SetCompare2 设置TIMx捕获比较2寄存器值 通过这个函数我们就可以设置脉冲宽度,从而控制PWM了、、代码如下:
好了,我们来总结下步骤: 1、开启TIM3定时器的时钟,如果有复用,也要打开复用的时钟。 2、初始化TIM3 3、设置TIM3_CH2的PWM模式,并使能其输出(注:要使能预装载寄存器) 4、开启TIM3 5、改变脉冲宽度,从而改变PWM 少了一些自认为是幽默风趣的语言、、为了是让自己不再显得那么吊儿郎当、、这篇博客在这又到了尾声、、本人也在学习阶段、、尽量把自己当成读者,让读者看得懂、、有写错之处望指出来、不胜感激、、希望能对你有理解上的帮助、、 |
实战经验 | ClassB功能安全认证代码与应用代码分区的实现要点
STM32G0 系列 I2C 通信异常典型案例分析与解决方案总结
经验分享 | LAT1490 两个STM32G0 I2C 通信异常的案例分析
经验分享 | STM32G0 I2C bootloader Go 命令后调试连接失败:DBG_SWEN 位复位修复
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
如何在STM32和Arduino上实现卷积神经网络
STM32与51单片机差异一文速览
STM32芯片命名规则
STM32 引脚到底有多少?为什么一个引脚能当好几个用?
 微信公众号
微信公众号
 手机版
手机版