本项目中使用了Zigbee模块(DRF1609H),作为无线数据传输使用,初始化DRF1609H主要涉及以下几个方面的内容:
! Y8 O3 p: B ~( F4 @( @2 }1,设置节点的类型,可以设置为:Router、End Device。Zigbee网络有3种类型的节点:Coordinator、Router、End Device,Cordinator接在电脑上面收集数据,我们这里是采集节点,所以只设置为Router或End Device。9 @ R* k$ S# E! y/ u
2,检测节点是否加入了网络
. X& o9 l g, B3,如果节点没有加入网络,则启动自动扫描加入网络
; E8 C6 P# s! Z9 U' E$ V. ~: [1 x; g& b) s. P' Q
1,节点类型的设置:
7 M9 p* `% L; Q; g首先读取DRF1609H的参数:G031向DRF1609H发送读取参数指令,发完参数后,有一个500MS的超时等待参数的回复,参数回复总共是53个字节,放在receiveConfigData里面。; v) w$ J( e* u. I$ x
6 v: ?6 `3 n7 l' `6 j: b
- //--Read DRF1609H Configures --: q# o3 ~( T- C: i) B
- drf1609h_readModule();
7 `/ W- C) [3 L4 j. { - HAL_UART_Receive( &huart1, receivedConfigData, 53, 500 );
- //------------------------------
2 H; u' j) j3 S6 x - void drf1609h_readModule(void)
6 [8 _% j5 `( I. @, k' r- | - {& J( W' }0 p2 m& o2 E( X, [5 x
- drf1609h_sendedIns = sendIns_read;8 I4 X# D+ j5 r, f! w$ n$ J' S0 D
- HAL_UART_Transmit_DMA( &huart1, readIns, 9 );" q+ J, F3 w2 Q9 M
- }
9 Y3 s7 y! U( T
- //---If DRF1609H Error or Read Error ------
2 S" g/ ~$ j# Y9 O% }9 c2 ]1 a+ |6 p - while( readParameterProcess(receivedConfigData, 53) == 0 ). D1 \- r) m; y$ s6 k% a9 e
- {
! k- y! B- ~, C8 P' ~6 z7 }& ` Z - drf1609h_readModule();
& ?. ~ ^. E+ x% Y8 j! P* @ - HAL_UART_Receive( &huart1, receivedConfigData, 53, 500 );* d. S9 g" w; |4 t( n
- }
- //------------------------------
& E, e6 \5 R7 i, i! N7 i - uint8_t readParameterProcess(uint8_t *inputData, uint16_t inputLen)
1 N) r/ ~4 Y) [5 X3 f - {) s8 a1 \7 c& G' D
- uint8_t result=0;
% g7 ^: o! ?; q6 o( x& D* l$ p/ `/ F7 n - ; v$ y! Q1 N+ N) C
- uint8_t tempXY=0;
7 R- w% M* `6 l# k0 a" I - uint8_t tempRight=0;* q, H7 j0 _$ E0 E6 s$ T0 V8 {
- uint8_t i=0;7 [4 H+ }8 _# J+ f) q# j
- ! H. P( A9 X* I; f' y+ s
- tempXY = getXY(inputData, inputLen);
$ M! p0 E5 V6 c. V- w' [" i - ( Z: s1 ^# [* o6 n
- if(inputData[0]==0xFA) { tempRight++; }) f! n; u* l4 u+ q
- if(inputData[1]==0x31) { tempRight++; }* o4 E; O% Y& p6 Y: P2 y0 O( W
- if(inputData[2]==0x0A) { tempRight++; }
3 a9 ]: U# |# |/ g - if(inputData[inputLen-1]==tempXY) { tempRight++; }
% e4 U2 p- h$ _5 D$ o; U - , I) b" H7 |; X$ o# T
- if(tempRight==4)
: p8 D; U8 Q" K - {
. i) `1 {) j% H3 B- T - //------
; y! ]6 C! Q c# R& \! v9 A$ K' B - drf1609.pointType = inputData[readHeaderLen +0];, o) o, {- A) v' g0 d/ H
- drf1609.PAN_ID = inputData[readHeaderLen +1]*256 + inputData[readHeaderLen +2];0 `8 K& m- \ j8 {' F0 E
- drf1609.Channel = inputData[readHeaderLen +3];
" G& j# z$ [6 Z4 k! { - drf1609.transferModel = inputData[readHeaderLen +4];! a) \# D$ o4 u! U; T# u0 q
- drf1609.userAddress = inputData[readHeaderLen +5]*256 + inputData[readHeaderLen +6];
0 d9 L% I9 I& b+ w. A0 V - drf1609.X7X8 = inputData[readHeaderLen +7]*256 + inputData[readHeaderLen +8];
; ~' |: \2 ~+ t: L2 D/ ^" A; a; ? - drf1609.uartBraudRate = inputData[readHeaderLen +9];$ q8 W& c% J6 N. l) p+ N9 d$ t. ]
- drf1609.uartDataBits = inputData[readHeaderLen +10];3 `* h" X- J. }# m6 I
- drf1609.uartStopBits = inputData[readHeaderLen +11];
- [/ E B7 \' \* p2 p - drf1609.uartParity = inputData[readHeaderLen +12];
" f+ ^2 t1 j J, [ k. s) Y' Y9 ~ - drf1609.X13X14 = inputData[readHeaderLen +13]*256 + inputData[readHeaderLen +14];, g; j* _8 \3 V9 B% H, _, n
- drf1609.antennaSelect = inputData[readHeaderLen +15];
- c( {5 d; x( D; |6 B9 {4 i/ } - 5 T. K: F+ [- ^7 q
- //-------3 P% o1 I6 J( |5 x
- for(i=0; i<8; i++)
; O4 l: \7 n: F) Z - {/ U5 L& ]! S! K# |, ^
- drf1609.macAddress<i> = inputData[readHeaderLen +16 +i];
# |/ ?( t8 Y5 {) d- l* g+ g - </i>}7 b0 j* u; ~, N$ R$ c
-
1 _7 n6 V+ _7 \( K) z9 H# _5 L& B - //--------- s% Z7 \. s' i% }
- drf1609.prePointType = inputData[readHeaderLen +24];
* t' b G+ c' h) J - drf1609.prePAN_ID = inputData[readHeaderLen +25]*256 + inputData[readHeaderLen +26];
}( L2 A- [+ r( E - drf1609.preChannel = inputData[readHeaderLen +27];
! x& E6 X8 d* }2 s { - drf1609.preTransferModel = inputData[readHeaderLen +28];
* `0 H+ t) m: W2 t( z - drf1609.preUserAddress = inputData[readHeaderLen +29]*256 + inputData[readHeaderLen +30];% Z+ P& d" {/ j, n' q
- drf1609.X31X32 = inputData[readHeaderLen +31]*256 + inputData[readHeaderLen +32];& @$ M3 }8 Q4 i7 c- H
- drf1609.preUartBraudRate = inputData[readHeaderLen +33];
8 e7 h( t c1 p- v1 P* Z - drf1609.preUartDataBits = inputData[readHeaderLen +34];
8 s6 P/ q5 E/ K6 y9 D! v - drf1609.preUartStopBits = inputData[readHeaderLen +35];
. ?: D _4 ^2 D& r- y# V - drf1609.preUartParity = inputData[readHeaderLen +36];/ e3 n# d+ l' B
- drf1609.X37X38 = inputData[readHeaderLen +37]*256 + inputData[readHeaderLen +38];
( e* H( a* b2 A" @! N( @, h7 C) I - drf1609.preAntennaSelect = inputData[readHeaderLen +39]; I3 X R6 h3 W5 ]+ a
- ! ? M' O. @$ |
- //-----------
# v, S! c0 Q4 G1 z' b" Z2 Z) j - drf1609.shortAddress = inputData[readHeaderLen +40]*256 + inputData[readHeaderLen +41];/ z( H0 x- f3 _5 H9 q" J" @% W U
- drf1609.X42 = inputData[readHeaderLen +42];+ Z( g3 l7 P2 q1 q" O# C+ |
- drf1609.isSecurity = inputData[readHeaderLen +43];9 _( T0 V2 X/ S
- ^ ?$ _. @3 a$ x$ J
- for(i=0; i<4; i++)& p5 `& \ \ E; `/ @& d4 Z5 Y
- {9 K8 |% k6 W, Z I- U
- drf1609.securityCode = inputData[readHeaderLen +44 +i];
4 W' u n( @) S) Q - }9 r, w- ^. e9 Z* u3 l, M+ U
5 s3 I+ P" N4 C( p2 }/ b* `- result =1;" M; R% t6 W9 e. s: g
- }
7 W0 E" j6 b' k# L$ |. w - ! u; a0 L3 C4 G4 u* r
- return result;% `% }9 k! I3 M( u
- }
接着比较读出来的节点类型与要设置的节点类型是否一致,如果不一致的话,就重新写入要设置的节点类型: - if( drf1609H_setPontType != drf1609H_readPointType )
写的过程:
3 _: t* G- A) C3 r1,产生写入参数
! G& n7 H* W. q* r2,写入- P9 N) U$ h$ ?& A0 t* `
3,接收回复的参数,看看写入是否正确! `1 {2 ?* A+ N$ o7 o
+ Y O2 ?8 B) s2 ?3 A _5 O
- getWriteIns(drf1609);
3 d6 H: Z: J1 C4 d3 H( j g
( m+ _+ e+ {4 r0 a- drf1609h_writeModule();" k' W0 O( `$ f# w- Z# {
- HAL_UART_Receive( &huart1, receivedConfigData, 5, 500 );
( C+ a8 \* [4 n) b写入正确以后,则重启模块(注意:DRF1609H的写入参数生效,都需要重启),这里是用一个IO口,控制DRF1609H的RESET脚拉低重启。
, P( i- n3 K, C# r: `- if( is_InsBack(receivedConfigData, 5) )5 y d7 O9 r* i2 W( z
- { e' m9 w9 S6 j/ d2 Y& s
- if(receivedConfigData[2] == 0x0A)
& T9 p# C8 z- U' R1 W - {
' v5 z. s# |' m: M- f% a1 @ - drf1609h_reset();
: D4 H2 U, _( g; {, t% r2 ^ - HAL_Delay(2000);/ H( i4 t3 i e
- drf1609h_status = drf1609h_powerOn;
7 X3 q) [: K3 a/ h# E9 a - }
: q. r4 p* \8 ]) `8 g, K0 u; j, J; a - else" Z/ I M" Q$ h; C% j6 w
- {3 m0 V& Y" a3 \ j+ `, J) t
- errorStart=1;1 x8 ^/ O" S, E8 s6 E
- }- I' j5 k; ]0 W" D: O5 o
- }
, S. t5 {* i5 _, P+ l) j3 c - else
- p) @' a+ @/ Z D/ b. y3 m - { b0 g* j% U- i& m! H2 ^
- errorStart=1;
" u: ` H) r: V2 M/ f" Q - }
7 B) U1 y. l7 H/ {6 W* ?需要注意的是,getWriteIns(drf1609),这个函数是把drf1609结构体,直接变换成写入指令,建议用户不要修改这部分,直接拷贝使用
0 ^2 g$ Q: N0 y% Z4 J" f8 L; x9 P: g8 m$ a% }
- //---------------------------------------------------* e6 M2 Y6 b; D
- void getWriteIns(_zigbeeParameters inputParameter)
4 w! [3 q+ M7 j% H { - {# y. [9 Z+ d2 p6 X+ g1 @ I
- uint8_t i=0;
' b' Z+ I# t5 Z' |) k0 }! N - uint8_t tempXY=0;
* m5 n N J' b - 7 p D2 P2 f0 M3 X
- writeIns[0]= 0xFC;
% p' G) Z0 ?5 e8 I; E* t- b/ b - writeIns[1]= 0x27;
) P( e, W+ [' I# ? d# w. |' s - writeIns[2]= 0x07;
5 i+ }/ d& k2 Z& v -
8 @, |- v, n) s- d, f - writeIns[writeHeaderLen +0]= inputParameter.pointType;, _/ \4 q; F7 K. t9 E+ P3 B
- writeIns[writeHeaderLen +1]= (inputParameter.PAN_ID & 0xFF00)>>8;
7 C3 F; y1 @- G4 I3 U( M7 F7 Q* q - writeIns[writeHeaderLen +2]= inputParameter.PAN_ID & 0x00FF;) D% r- ]4 U& S1 O2 d7 ?, h
- writeIns[writeHeaderLen +3]= inputParameter.Channel;4 k6 \! z, R0 t# Z2 ^8 ^; y
- writeIns[writeHeaderLen +4]= inputParameter.transferModel;1 f! J0 c0 a! H9 j/ Q" p( q
- writeIns[writeHeaderLen +5]= (inputParameter.userAddress & 0xFF00)>>8;
" a& O0 p* t: o) c+ D - writeIns[writeHeaderLen +6]= inputParameter.userAddress & 0x00FF;
! N8 C% h$ b, y: r j/ K. R6 B5 ~: [ - writeIns[writeHeaderLen +7]= (inputParameter.X7X8 & 0xFF00)>>8;. l) t9 c- |# @ U3 o8 @
- writeIns[writeHeaderLen +8]= inputParameter.X7X8 & 0x00FF;
- I, Y0 M; v G - writeIns[writeHeaderLen +9]= inputParameter.uartBraudRate;+ V7 ]& q6 f: R, |* C
- writeIns[writeHeaderLen +10]= inputParameter.uartDataBits;
( i5 f8 }: F- B# O4 V - writeIns[writeHeaderLen +11]= inputParameter.uartStopBits;$ B' G- Q: I; p5 B5 A: |% S& z
- writeIns[writeHeaderLen +12]= inputParameter.uartParity;8 Y" Y& L+ A7 c8 J
- writeIns[writeHeaderLen +13]= (inputParameter.X13X14 & 0xFF00)>>8;7 n7 \" L) s* ]4 a# V& y
- writeIns[writeHeaderLen +14]= inputParameter.X13X14 & 0x00FF;
' P6 d- M# f! V - writeIns[writeHeaderLen +15]= inputParameter.antennaSelect;
/ h) N; ?4 x/ b. [- w - 9 c& |; d, V% p! R
- writeIns[writeHeaderLen +16]= inputParameter.prePointType;) w/ X7 u# U' d" f/ p2 k* C
- writeIns[writeHeaderLen +17]= (inputParameter.prePAN_ID & 0xFF00)>>8;$ Z1 @% j, D( J+ a3 `9 U# N0 r
- writeIns[writeHeaderLen +18]= inputParameter.prePAN_ID & 0x00FF;
% t) x1 C+ W* i; u3 N3 z - writeIns[writeHeaderLen +19]= inputParameter.preChannel; Q/ o! M& E9 f
- writeIns[writeHeaderLen +20]= inputParameter.preTransferModel;
8 `) I& G8 w: v; J - writeIns[writeHeaderLen +21]= (inputParameter.preUserAddress & 0xFF00)>>8;
0 t* N A! | a1 n- i. a) o/ [1 \4 { - writeIns[writeHeaderLen +22]= inputParameter.preUserAddress & 0x00FF;! p5 v k3 p R& A7 c/ x6 g
- writeIns[writeHeaderLen +23]= (inputParameter.X31X32 & 0xFF00)>>8; //--AS ReadParameter's X31 X32
! q% l" W5 B) G1 p; l) s; c3 n - writeIns[writeHeaderLen +24]= inputParameter.X31X32 & 0x00FF; //--AS ReadParameter's X31 X32
* b4 `: r2 y4 u3 m6 W* H! L$ V - writeIns[writeHeaderLen +25]= inputParameter.preUartBraudRate;
, U0 K# `' r. n( P" z, k - writeIns[writeHeaderLen +26]= inputParameter.preUartDataBits;: t* r. p- }$ B8 E$ a
- writeIns[writeHeaderLen +27]= inputParameter.preUartStopBits;, Y8 Y9 ~0 d9 R5 R n1 N+ a
- writeIns[writeHeaderLen +28]= inputParameter.preUartParity; }, W6 X( `+ I
- writeIns[writeHeaderLen +29]= (inputParameter.X37X38 & 0xFF00)>>8; //--AS ReadParameter's X37 X383 K3 i& e- V2 k( S4 r! H! o
- writeIns[writeHeaderLen +30]= inputParameter.X37X38 & 0x00FF; //--AS ReadParameter's X37 X38
- U6 I/ I, m. b0 }5 h1 ` - writeIns[writeHeaderLen +31]= inputParameter.preAntennaSelect;* \7 }- v; s O: R
- writeIns[writeHeaderLen +32]= 0x1;
. T* W( j* _) V: R9 Q' q& Q ~/ C6 c; o - writeIns[writeHeaderLen +33]= inputParameter.isSecurity;0 N) [# t& c# ^6 j$ C$ E
-
, T$ f5 {( k/ y* U ] - for(i=0; i<4; i++)% j- w) q; {% n+ d4 ]6 }
- {' ?/ y# D! ?7 G* q& s' l' p
- writeIns[writeHeaderLen +34 +i]= inputParameter.securityCode<span style="font-style: italic;"><span style="font-style: normal;">;9 B6 C: E. C/ j
- }2 W1 n; q5 @1 B" p' Q0 |
-
& E. z* q, ?, ]) Z, C - tempXY = getXY(writeIns, writeInsLen);
8 D# q+ Z$ H7 Z, Y -
1 i f9 @! J% c4 [ o# t - writeIns[writeInsLen-1]= tempXY; 9 N5 ~( N$ x- G' ~ O9 O
- }</span></span>
2,检测节点是否加入网络
0 O! k, q# J' _7 `& T) `检测节点是否加入网络,我们这里使用了读取DRF1609H节点信号强度指令,如果读取信号强度成功(回复的数据是正确的),则表明DRF1609H已经加入了网络并且与Coordinator通讯正常。
: u8 p. O7 L N* H* O. f6 a这个函数用来检测DRF1609H是否加入了网络,加入则回复1,没有则回复0:0 {# ]' C- l8 X! ]
注意:这里是检测10次,没有加入也回复1,主要考虑在低功耗情况下,如果Coordinator没有开机,如果节点一直检测,则对耗电不利,用户应根据实际情况修改使用。
" {; R# ^) I) I- T
" f- b4 V7 e& R+ h+ ^" Y- uint8_t drf1609h_isJoinedNet()
5 z, S# i! ]7 {/ D2 C! @/ R - 1
/ s$ b+ o# Y& c }4 V - //----------------------* @- `6 Q" N: h1 }! _* S
- uint8_t drf1609h_isJoinedNet()0 T- k2 m6 v2 N& T! m, n6 H. q
- {; c$ U$ J ~3 @, p
- uint8_t result=0;
( U4 k5 n' ~; q. S$ d - uint8_t i=0;
; L# P) E% w3 a
" C2 _1 p9 _1 q3 t- //MX_USART1_UART_Init();) l( c+ B7 m( v( y0 G, n( R
- //HAL_Delay(10);& _1 a2 x) {+ z: R# r; X+ g3 {
- for(i=0; i<8; i++)
, y% {: i( M7 F; _" J6 r5 m - {
& j- _ A4 j& o& c! |# n/ s; g - receivedSignalData<span style="font-style: italic;"><span style="font-style: normal;">=0;
0 V' `7 K8 m& i, @. _9 v5 ? - }
2 z/ { X$ O4 W* U
" I4 q, L# f7 I; x" g( H+ G" A- drf1609h_requestSignalIndex();
. B; V6 k$ M3 F" ?* L( @ - HAL_UART_Receive( &huart1, receivedSignalData, 8, 500 );1 f i0 {2 _& Z! N# f2 U
- HAL_Delay(1000);
) m" g6 w% G& @3 |: V: H - 0 L* X7 b! O* x4 b, A
- if( checkSignalData(receivedSignalData, 8) ). v# P# y( l6 E4 d( p
- {# f; o) z* N5 J/ W( [3 }
- result=1;
; F, K# W u% o: @ - receivedSignalData[8] = drf1609.pointType;
$ `4 t4 x9 O1 Z, J4 W - HAL_UART_Transmit_DMA( &huart1, receivedSignalData, 9 );
! s$ t1 r; p! {$ l* m1 q7 \ - }; l* X. c. | o: Z
- else
8 d7 P* n$ T, R5 N, C0 }* d - {
3 Q I8 }8 t: [( f) ^ ~) }! S - haveTryToJoinTimers++;: q' Z2 i' x E1 c5 F$ X ?0 H
- if(haveTryToJoinTimers >= maxJoinTimers)) Q: n! ~, d+ A# e0 N- g, ]( C1 e
- {
8 d* r" C- p! ^ p9 H - result=1;
* E( o6 Z& M) A! k - }/ H8 D K; k2 f
- else3 O* L7 A* H( ]) v# y+ O
- {
! R4 T; i7 s/ @; e2 m - result=0;
, P: ~( w9 U; g: Z* J3 Y - }
$ |2 ^ M- j2 e! ~; i$ C- k6 K m - }# I" p, C$ | q( w; i6 e6 ^3 ?# t
- ! A4 k! V" Z. W
9 R3 q& e/ R0 K: B- return result;& N; g/ I. _) G5 k9 W0 ~2 q
- }</span></span>
检测的过程:7 W; I; r$ O3 s! ]
1,发送读取信号强度指令8 Q5 d5 W f! z2 {& p7 @1 e
2,等待接收回复数据
) B4 M4 y- M9 K/ ~9 X3,如果接收回复数据成功(已经加入网络),这里将收到的数据加上自己的节点类型发送给Coordinator,通知节点已经加入成功
. o1 I9 @1 t$ p% w' W
, x4 [( G: b3 G& ~* C- drf1609h_requestSignalIndex();
- w0 t& R+ M, c0 o7 w+ n- ^ - HAL_UART_Receive( &huart1, receivedSignalData, 8, 500 );6 V$ n1 @$ J1 @4 h) G! K) w; g
- HAL_Delay(1000);: g1 ^8 i0 k3 i# ?
- * \, u, r8 L4 R- T
- if( checkSignalData(receivedSignalData, 8) )
/ f1 d: v/ s# N- N - {2 \7 J1 P8 |0 W x- c% P
- result=1;; `4 W( _" Q4 Z
- receivedSignalData[8] = drf1609.pointType;
5 o/ `2 Z% s' N( B. a) s" o, f9 q% Q - HAL_UART_Transmit_DMA( &huart1, receivedSignalData, 9 );) F( X" k# L! R. x/ t
- }
5 }8 ] Y; j& E2 p3,启动节点自动加入网络
+ f$ K/ R6 k6 s H如果连按三次DRF1609H的Function按键,则开始自动扫描,如果扫描到Coordinator,则可以自动加入网络,并从Coordinator处获得“给Router预设的参数”,所以节点是不要设置的,我们节点的板子上也没有把DRF1609H的串口留出来,而是通过连按三次按键,自动加入网络,自动取得参数。 G+ Q" v: e% Z$ `$ l
1,检测DRF1609H是否加入网络,用的是读取信号强度的指令
3 |& @! g! c+ n |+ i" }2,如果没有加入网络,则启动自动加入网络
; W2 G: _/ E. ^6 l5 ?3 c3,启动后,等待12秒,再读取信号强度,判断是否加入了网络
% Y7 A5 }9 Z. O8 M0 I注意,板子上有按键,如果是低功耗模式,建议不要启动这个功能,用按键手工加入网络,如果Coordinator没开机,一直扫描网络,会很快耗光电池。
& ]/ H% \6 t- ^1 l/ |
2 R* Y! j# O" X: k- //-- Do 5 timers get Signal Index ----//
& K* F, R; K+ Q. h/ g - for(i=0; i<5; i++)2 H4 o$ |: _* \* ~+ ^8 U
- {! O& R" }1 U& z- K% n
- drf1609h_requestSignalIndex();
" i* a: g/ J- F9 F! ?! ~" a9 ~; e5 ? - HAL_UART_Receive( &huart1, receivedSignalData, 8, 500 );
/ y+ S0 y" e- V9 Y - HAL_Delay(500);: c; P- _3 e5 E. }0 r6 |
- 5 w! g2 r: {! z2 K# }; g( I
- if( checkSignalData(receivedSignalData, 8) ) Q' V& v8 b+ Q" n* z9 B6 ?+ F- n
- {, e$ E; S/ e. B. M1 i0 K7 P
- tempVal++;; h: N9 L& v& T: P( a+ p1 i! Y' e) Q
- i=5;. i/ c$ v& q- v4 S/ {
- }# G: I `1 D- M' c$ Y4 W
- else. _4 A. H A3 ]; K9 q! a& ^2 G5 Y7 r6 T
- {! w- m D3 P2 L- j$ `6 `0 G6 L
- notGetSignalVal++;
* h& o$ {4 G6 Q# C% B. J" t - }1 F5 {$ t3 v5 j; l, G0 x6 P/ l2 K3 u
- }
- drf1609h_autoJoinNet_Start();, ~7 c, V3 I8 ^. W1 n* i) b
- HAL_Delay(12000);
1 ]+ O" i8 c. [! G' p! v进去自动加入网络的代码看看,其实就是模拟三次按键:
. i: Z; a; q" _( C6 i0 A+ ^开始以后,DRF1609H上的2个灯会快闪,观察到一个灯灭,一个灯慢闪以后,说明已经加入网络。0 U" J/ y; `/ ~" L8 m* @2 _: A
7 C9 D5 W G+ L5 U1 ~" D" s0 H
- //---------------------------------------
" D5 M! D+ b, A* K& L% b - /* This Simulate Function Key to start
' W9 L- O9 l, u. ~/ s2 | - * point auto join net
; E/ }0 e; T5 u' p6 s - * ____ ______ ______ ______
! f5 Y( ~ ~' Z' E; m5 R - * |__| |__| |__|
2 J2 [$ ]$ ^) X, k- C; d d - *$ A" x3 L. z$ x2 N9 R! n
- * 120 200 120 200 120 200
3 R3 r6 f9 o. Z' [ - *
. Z" h9 `' s3 q( p, | - * ----------------------------------*/) }: A! z( @& C8 o" o5 w) y" R
- void drf1609h_autoJoinNet_Start()
7 t; B# k3 I- m4 d1 ]: J - {
0 W* {0 V- e. r, C - uint8_t i=0;
; P$ s/ W3 u8 V2 A
* A; h6 A$ M( l5 w- c& b6 Q- set_autoJoinNetPin_output();3 V5 @5 ]+ h" b+ U# L
- set_autoJoinNetPin_out_1();0 q# D$ I( u2 n
- HAL_Delay(100);
3 O. ?( B6 J, x) k - ( B @3 z1 E6 s* v4 g, c, L; C! k
- for(i=0; i<3; i++)
4 H; g( o8 {% C! Q- {9 c - {8 V; d U. b, U/ L2 e9 X
- set_autoJoinNetPin_out_0();" e, P& _, [' T- {" g. q3 ~
- HAL_Delay(120);
( a1 Z+ t: Y' z, @5 Y3 o4 b0 y0 i - " v2 M2 \/ m) p0 y6 m4 |# D
- set_autoJoinNetPin_out_1();
. H) x, h- ^2 D7 n+ o2 } - HAL_Delay(200);
c4 q- ]3 a+ T7 C8 F x - }
2 T0 L; y; Z' _% d! D, m5 ] - & y! E* o! m% m' f) s
- set_autoJoinNetPin_input();
, H; {+ u9 g, @! f) d( [2 |/ ` - }
+ F# l: }6 L2 D- ~, l8 P0 x h4,DRF1609H的相关指令
/ `/ D; t' ?& _4 j; k主要有读取参数、读取信号强度、写入参数等指令,项目里面都已经列出来了. v1 c! w, f7 [
如果需要增加其它的功能,要参考DRF1609H的说明书# t$ Y/ k- r. W* a
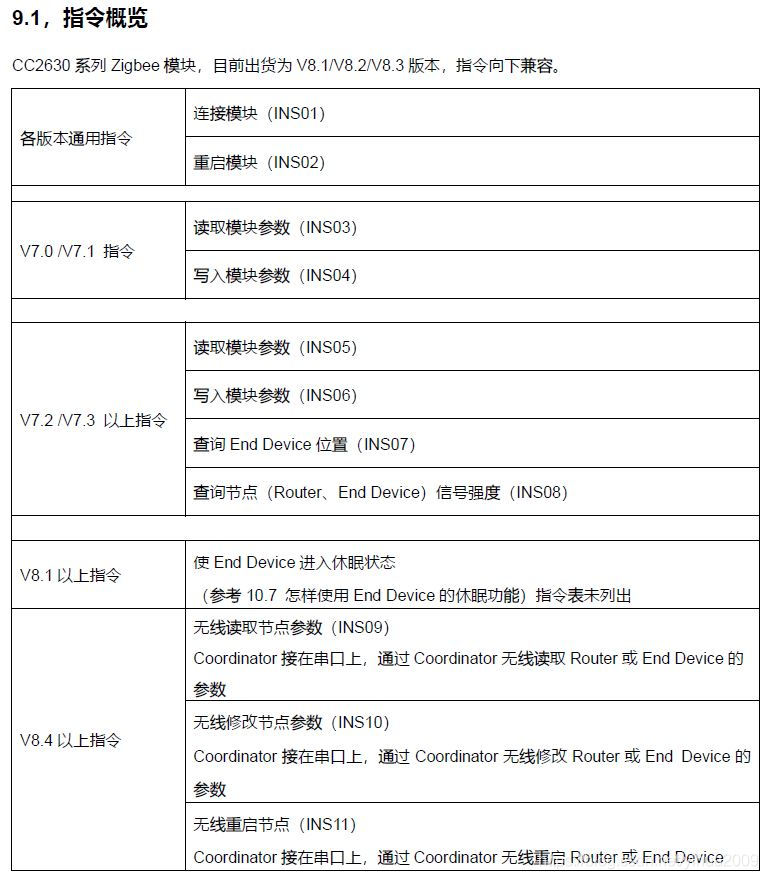
# b( z1 r. {+ S2 m P. i- uint8_t linkIns[9] = {0xFC, 0x06, 0x04, 0x44, 0x54, 0x4B, 0x52, 0x46, 0x81}; //---INS01( x. V- m) \1 F2 ^; T5 K9 B
- uint8_t restartIns[9] = {0xFC, 0x06, 0x06, 0x44, 0x54, 0x4B, 0xAA, 0xBB, 0x50}; //---INS024 }6 r( s9 m7 ^
- uint8_t readIns[9] = {0xFC, 0x06, 0x0E, 0x44, 0x54, 0x4B, 0x52, 0x46, 0x8B}; //---INS05) C& H* G7 i J1 |5 I& L5 X. Q
- uint8_t writeIns[42]; //--INS06
- p9 \/ O" J# ? - uint8_t requestSignalIns[9] = {0xFC, 0x06, 0x0C, 0x44, 0x54, 0x4B, 0x52, 0x46, 0x89}; //--INS08
& m, C: z" [7 u0 ~9 A2 V
) W* V6 Q3 U @3 ]& m( P+ s0 C7 D |
.png) STMCU小助手
发布时间:2021-11-13 22:00
STMCU小助手
发布时间:2021-11-13 22:00