1. 材料介绍
STM32F103VET6开发板,此处我使用的是野火的指南者,不过F103系列的应该都是可以通用的,具体大家可以自行参考相对应开发板的用户手册。
SG90舵机一个。我使用的是180°旋转的,实际上在某宝购买的时候360°、180°、90°的SG90都叫这个名字,如果你真的不懂的话,选购之前最好是问问客服可以旋转多少度。
杜邦线若干。
2.接线方法
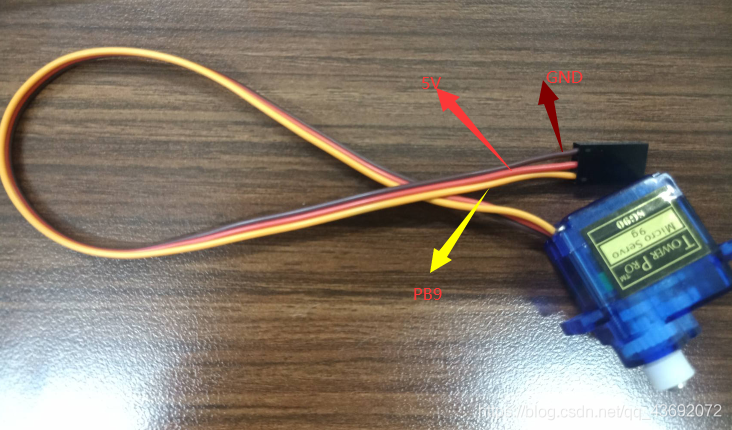
主要是SG90舵机的三根线,我使用的这款舵机红线接5V(3.3V带不动舵机),棕色接GND,黄色线接开发板的PC6.

3.舵机控制原理
控制信号
舵机的控制信号为PC6输出的PWM信号,周期为20ms,其中脉冲宽度从0.5ms~2.5ms,对应舵盘的0°到180°,呈线性变化。
也就是说,给舵机提供一定的脉宽,它的输出轴就会保持在一个与之对应的角度上,直到下一个不同的脉宽出现,转到新的对应角度。
反馈信号
舵机接收来自信号线的控制信号,电机在转动时,会带动反馈电位计的转动,电位计将输出一个电压信号到舵机控制板,进行反馈,该信号与控制信号进行比较,从而调整转动方向与速度,直到反馈信号与控制信号相同。
代码部分
- <font face="微软雅黑" size="3">#include "stm32f10x.h"
- void pwm_init(void);
- void delay(uint32_t x);
- int main()
- {
- pwm_init(); //PWM初始化
- while(1)
- {
- TIM_SetCompare1(TIM3, 195);//0度
- delay(10000000);
- TIM_SetCompare1(TIM3, 190);//45度
- delay(10000000);
- TIM_SetCompare1(TIM3, 185);//90度
- delay(10000000);
- TIM_SetCompare1(TIM3, 180);//135度
- delay(10000000);
- TIM_SetCompare1(TIM3, 177);//比180度旋转的稍微小一点,因为舵机旋转到180度之后可能会卡一下,详细原因可以自行查找
- delay(10000000);
- // TIM_SetCompare1(TIM3, 175);//180度
- // delay(10000000);
- }
- }
- void pwm_init()
- {
- GPIO_InitTypeDef GPIO_InitStructure; //声明初始化GPIO的结构体变量
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//声明初始化定时器的结构体变量
- TIM_OCInitTypeDef TIM_OCInitStructure;//根据TIM_OCInitStruct中指定的参数初始化外设TIMx
- //开启时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
- // 配置GPIO的模式和IO口
- GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6;// PC6
- GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
- GPIO_Init(GPIOC,&GPIO_InitStructure);
-
- //TIM3定时器初始化
- TIM_TimeBaseInitStructure.TIM_Period = 199; //PWM 频率=72000/(199+1)=36Khz//设置自动重装载寄存器周期的值
- TIM_TimeBaseInitStructure.TIM_Prescaler = 7199;//设置用来作为TIMx时钟频率预分频值
- TIM_TimeBaseInitStructure.TIM_ClockDivision = 0;//设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM3, & TIM_TimeBaseInitStructure);
- GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE);//改变指定管脚的映射 规则在F103参考手册里。
- //PWM初始化
- TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
- TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//PWM输出使能
- TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low;
- TIM_OC1Init(TIM3,&TIM_OCInitStructure);
- TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);//使能或者失能TIMx在CCR1上的预装载寄存器
- TIM_Cmd(TIM3,ENABLE);//使能或者失能TIMx外设
- }
- void delay(uint32_t x)
- {
- while(x--);
- }
- </font>
|
.png) STMCU小助手
发布时间:2021-8-6 12:51
STMCU小助手
发布时间:2021-8-6 12:51
 微信公众号
微信公众号
 手机版
手机版