77.1 初学者重要提示
6 I+ X) \( P9 ?/ _& |) ~( ` 学习本章节前,务必优先学习第76章,本章是建立在76章的基础上。- [! ?( _/ c, K$ o* o
本章77.6小节的知识点对于本章的理解尤其重要。- K2 t8 N" [' r( |3 `
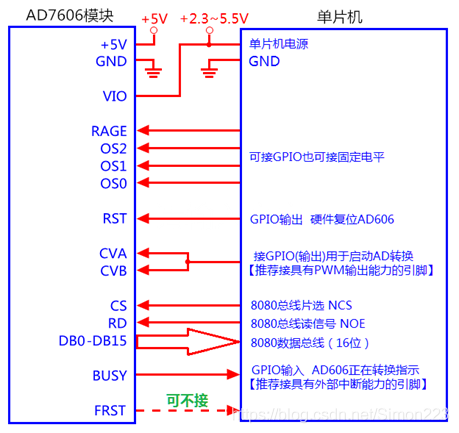
AD7606 的配置很简单,它没有内部寄存器,量程范围和过采样参数是通过外部IO控制的,采样速率由MCU或DSP提供的脉冲频率控制。
6 T7 A# U8 f$ Z2 m1 r AD7606必须使用单5V供电。而AD7606和MCU之间的通信接口电平由VIO(VDRIVE)引脚控制。也就是说VIO必须接单片机的电源,可以是3.3V也可以是5V(范围2.3V – 5V)。
8 C0 h1 ?( K* g6 a) W 正确的理解过采样,比如我们设置是1Ksps采样率,64倍过采样。意思是指每次采样,AD7606会采样64次数据并求平均,相当于AD7606以64Ksps进行采样的,只是将每64个采样点的值做了平均,用户得到的值就是平均后的数值。因此,如果使用AD7606最高的200Ksps采样率,就不可以使用过采样了。
0 i* P/ y) f9 R- c' q% r STM32H7驱动AD7606配合J-Scope实时输出,效果绝了,堪比示波器,使用方法详解本章节77.9小节。
8 s0 |2 i/ X, H. m8 C# `* b, _ K 本章配套例子的串口数据展示推荐使用SecureCRT,因为数据展示做了特别处理,方便采集数据在串口软件同一个位置不断刷新。
* w% _3 m4 U) |, p+ E! E AD7606数据手册,模块原理图(通用版)和接线图都已经放到本章教程配置例子的Doc文件里。( D* H4 y9 v) K4 Y. {5 U
测试本章配套例子前重要提示:
6 T% y4 L' v* E& M! y U/ k 测试时,务必使用外置电源为开发板供电,因为AD7606需要5V供电电压。板子上插入AD7606模块时,注意对齐。: C2 f; X! v1 A
板子上电后,默认是100Ksps,2倍过采样。( Q) I: _ w6 d5 R @, V
如果使用的JLINK速度不够快,导致J-Scope无法最高速度实时上传,可以使用摇杆上下键设置过采样来降低上传速度。5 N" D9 Y) o: p: x' f
默认情况下,程序仅上传了AD7606通道1采集的数据。
$ V2 l$ O' N! L3 y, P2 {
( g$ s' l; z! `6 B77.2 ADC结构分类7 c c6 @0 x' Q7 Z9 S* o9 I
, d& w1 ~0 |0 P9 X& D
$ ~0 [( y2 D( ]77.3 AD7606硬件设计
1 R+ ~1 ^, Z5 F/ C. h9 T- t- X# q( G$ R6 l
6 ~7 [6 L" I, M @77.4 AD7606关键知识点整理(重要)
0 N1 V2 M+ H- F. K U+ K# M/ Y; x3 o! O, B( Y" @
) N0 Q0 } @) [) F/ H) L( @+ g77.5 AD7606的FMC接口硬件设计; i$ O/ q9 ?& @6 _
. p1 W+ U) }9 P' p1 T
+ `9 w5 H9 Q0 A, O/ ~77.2,77.3,77.4和77.5小节的知识在第76章节有详细说明,本章不再赘述。* p3 B, e2 k- D" S+ E: X
9 _& h5 q/ `) f4 d. X, D2 c77.6 AD7606的FMC DMA实现思路
1 ?' \1 m0 b& E1 ~3 l5 VFMC的并行接线方式如下:; x3 i. r8 `2 M% H
1 H! f. @7 G+ s5 l- ?4 ]
9 ^' z8 S7 q& _/ ?, E# r# S2 S9 k/ [& j
5 m" p0 H4 Q3 |, v& g7 [8 y这里实现FMC DMA方式的关键就是BUSY引脚去触发DMA控制,如果是单纯的DMA正常模式,实现比较简单,接收到INT引脚的就绪状态,使用FMC DMA将8路数据全部读取出来即可。
- w0 a+ f5 J$ b' h' ~7 ]2 \9 Y% i/ r Y* L3 ^9 c
难点在于驱动AD7606不像SRAM,SDRAM,仅需一个FMC接口就行,它还需要一个独立的时钟引脚,每次时钟触发要连续读取8次数据。针对这个问题,就可以使用DMAMUX的事件触发方式来实现,可以选择的主要是:
8 a0 }3 q0 l( W5 }
& c4 p9 j- V$ h# p3 k Y: s: P- HAL_DMAMUX1_REQ_GEN_EXTI0
9 J, p/ f) a6 \) z# h - HAL_DMAMUX2_REQ_GEN_EXTI08 u4 j( O0 P! b# |( L% i) ~
- HAL_DMAMUX2_REQ_GEN_EXTI2
按照这个思路,尝试了下面三种方案,但实现都太复杂了。
, }& h3 j% W F" n4 j& f) i( Q- T: ^" f& u5 [( c
方案1:
/ C) `: _) t3 l3 w/ H+ E2 U" C定时器配合DMAMUX两级级联,苦于找不到合理级联触发源。, t* @" d- ]" p
& I, H* P I/ H 方案2:. K5 D0 n2 F5 P
定时器触发DMAMUX,然后DMA触发MDMA,这个是可以实现的,就是MDMA玩起来有点复杂。1 G. `- s T- p5 g1 r5 |; y
: g+ W9 q* [- E
方案3:
$ Q* Z+ S& S4 R1 c' h两路DMAMUX控制,不限制必须用定时器的PWM引脚,然后配置定时器做同步触发源,也是可以实现的,占用太多硬件资源。6 K% Q& j+ {- U4 t; ?1 N# S
最终这三种方案全部否决了,实现的略麻烦。最终有个第4套方案,实现这套方案有如下几点:2 ]! i2 R7 g# z
. {9 ^4 [" X& @8 m
77.6.1 定时器PWM输出控制AD7606转换
' W: B) [3 ?5 I V, s通过定时器PWM输出控制AD7606转换比较容易实现,我们上一个章节就是这种方式控制的。. r6 a0 [# ^2 m; I/ j; t& g
6 G* Q3 o4 ?0 y: G: p# t6 w0 g77.6.2 定时器UP更新事件触发DMA实现突发传输, q& X, a' D' L+ l" C1 O! G$ r! ~
有了定时器PWM控制AD7606转换。还需要保证每个PWM脉冲读取一次数据,而且是连续读取8路。这就需要用到下面两个知识点,非常关键:
/ O8 [0 Z4 }) B4 a- s同时开启同一个定时器的PWM输出和UP更新事件。
- i/ N% t8 ~1 ^1 ~这样可以保证每个PWM后都配有一个UP更新,通过UP更新来触发DMA传输。# F5 {/ c( {1 M, H4 Y
) s3 d* | [- e; m# c2 u
DMA突发功能实现每次触发连续读取8路数据。
! ]) N2 J9 Y- n5 x) W$ o! pSTM32H7支持的突发方式如下,下面这个表格尤其重要,配置突发务必要按照这个表格来配置:8 u2 _% w# d ]4 y: B ?4 g
7 m9 d7 D6 T( P! j
/ ?6 U! [+ L- j1 |3 |
& z3 z9 h. v, H' E: v+ I2 N我们要实现的是连续读取8路16bit数据,上面表格中红色方框部分刚好支持。9 N1 C4 d+ Y% F) m& W* ~8 u
. k7 ?9 K+ b _+ z' l# a6 I
77.6.3 不使用BUSY引脚如何保证读取正确的数据
4 ~' }6 M) }/ M) a解决这个问题的关键就是AD7606支持转换期间读取:2 ~2 y3 h) B) ^3 a1 @2 }
8 J3 F! u4 z. A) |1 g- [( d, C
/ {8 v! u7 O9 G8 n/ _+ }/ f. d$ X& u8 y
这个功能正好用在本设计中,这里有四个关键时序参数:! L: Y* \) k' |$ ?' }
& ~! s( v9 _3 A$ w; a
t2/ J& _5 q: U6 b! J% F
表示最短的CONVST低电平脉冲,最小值25ns,这个时间我们用PWM脉冲低电平控制。+ j. P! }4 s- b
* O5 |, c0 \2 ?7 J6 e
t3
$ ^; ]2 k6 q9 U+ A% M+ x ^* Z表示最短的CONVST高电平脉冲,最小值25ns,这个时间我们用PWM脉冲高电平控制。6 U, X1 @1 n1 G6 d
4 N+ j4 j2 t) ~( K
t60 m+ D6 Q: b; \. ~3 y( h% l& D4 J
表示CS上升沿和BUSY下降沿之间的最长时间,最大值25ns。这个参数的主要作用是限制用户一定要在BUSY转换有效之前立即读取。, @2 y" o: T; P/ E2 |
6 s5 d5 M" O$ Dconv/ H4 e4 G' }+ W6 J3 X' Y C. Y
表示AD7606转换时间,对于AD7606-8来说,最小值范围是3.45us到4.15us。
6 t" R N7 Z5 {5 G4 w9 O6 Z: B U3 t7 i2 S
! x" x7 W' \$ ]; G: J/ ~+ P
: L; `: [( J8 I3 a: z
/ W0 c& c! W; x5 ~, ?
) b) s; ]5 B5 O- {+ ^) Z+ Q有了这三个参数,配置PWM的占空比就比较考究了,我们仅需配置好PMW低电平宽度,将其设置为接近于25ns的低电平脉宽时间,其余时间全是高电平即可。这样我们就保证了每次脉冲立即读取上一次的转换数据。
* B) ~3 b7 \3 q9 l p+ `6 L2 O% Y( Z- d" I; `, K
77.6.4 FMC DMA双缓冲实现& w% D" Q( r: B
DMA双缓冲的实现比较简单,我们借助DMA半传输完成中断和DMA传输完成中断即可。其中半传输完成中断就是DMA数据传输完成一半的中断。; q6 \ k' \( m% W
( t4 l$ S3 ^8 Y' E9 r) {
77.7 AD7606的FMC接口驱动设计
% x# M5 o1 e6 AAD7606的程序驱动框架设计如下:
0 C5 G6 k6 M$ c% B" y6 Z* Q" \" W7 [
( a+ ?" o! o! l$ j1 ^9 U$ P, ^( `# `8 k# g) y+ m- d2 m
! u8 _& X! \* Y" J2 u有了这个框图,程序设计就比较好理解了。( x+ o5 V- l+ l+ }1 w& S9 e
W/ n& o1 g5 y1 N
77.7.1 第1步,AD7606所涉及到的GPIO配置
2 G. o+ T) i" ?6 [7 C这里需要把用到的GPIO时钟、FMC时钟、GPIO引脚和复用配置好即可:6 O: s a, `- u
/ i& t V% ~ j. D4 c7 j
- /*
/ u; G9 ?3 L. W9 F* D+ P5 o# m - *********************************************************************************************************8 p$ B e- `3 {- f t
- * 函 数 名: AD7606_CtrlLinesConfig6 z1 J% t7 }& h- L1 m( w
- * 功能说明: 配置GPIO口线,FMC管脚设置为复用功能
5 w" h, L3 p8 {0 g# S - * 形 参: 无! v/ \. ~+ ?4 v2 C( b5 Y2 b
- * 返 回 值: 无, X b& q# W7 n
- *********************************************************************************************************8 y0 v* h5 e% F! X) @. D$ N
- */! a F j/ B5 Q
- /*
) g7 y5 Y, r1 z. _5 c - 安富莱STM32-H7开发板接线方法:4片74HC574挂在FMC 32位总线上。1个地址端口可以扩展出32个IO" e r$ Y4 I7 y; r7 S9 d
- PD0/FMC_D28 I" F$ S p: {- Q- ^: A
- PD1/FMC_D3
) P' D7 f- ~2 }+ H1 r: A. k2 _ - PD4/FMC_NOE ---- 读控制信号,OE = Output Enable , N 表示低有效
! X. M, i, i S1 V1 T# _ - PD5/FMC_NWE -XX- 写控制信号,AD7606 只有读,无写信号
1 X+ Y* W1 V" V2 n+ b, d- m7 f - PD8/FMC_D13
! h6 {# f1 H' N3 ?8 c) F& C, G' I - PD9/FMC_D14 z1 q b2 |5 ^2 {. d
- PD10/FMC_D15
# u! _+ G9 c3 [/ ] `2 ` - PD14/FMC_D0
0 l9 O5 Y" a) C1 I - PD15/FMC_D1
. p! o5 c W+ c5 }- W3 x - 3 W% G; N( }, Q8 `
- PE7/FMC_D4
" N. U y' D# F - PE8/FMC_D5
1 O0 \9 M/ p' R( Q - PE9/FMC_D62 \9 `1 N# Y8 H/ ^4 I2 H/ Y* K
- PE10/FMC_D7
% a$ k0 O9 T4 @# B/ e2 D ? - PE11/FMC_D8: K. v' d$ h4 ]6 ]8 [: e
- PE12/FMC_D9
- Q, b/ {9 E! D - PE13/FMC_D10" A/ } d7 @! l+ ~
- PE14/FMC_D11; I) V5 i; u, o! E+ y$ j) q
- PE15/FMC_D12
! f. Q/ M" o2 g) I. K" |, d4 s8 X: D
* A$ s# [0 D/ N5 ]/ T1 w' e/ c- PG0/FMC_A10 --- 和主片选FMC_NE2一起译码. h$ Z+ Z3 y7 F% i# C
- PG1/FMC_A11 --- 和主片选FMC_NE2一起译码6 F6 K) M/ a! O# z0 o; f" z2 Y
- PD7/FMC_NE1 --- 主片选(OLED, 74HC574, DM9000, AD7606) # E% S: V1 x9 p
- / p. U$ f- A+ D/ `
- +-------------------+------------------+0 h9 I2 r$ O/ S0 U3 @
- + 32-bits Mode: D31-D16 +
% q/ f/ z' J# Q" \' k' P - +-------------------+------------------+# F3 O* [4 w1 H7 h, {/ _6 R) [
- | PH8 <-> FMC_D16 | PI0 <-> FMC_D24 |! O# S8 A0 v5 o) G$ ]
- | PH9 <-> FMC_D17 | PI1 <-> FMC_D25 |6 H2 A; Z5 V; G& d8 E; _4 y
- | PH10 <-> FMC_D18 | PI2 <-> FMC_D26 |# m" f3 _, B' Q4 S, Y
- | PH11 <-> FMC_D19 | PI3 <-> FMC_D27 |( B% ]9 ?9 t& s( c/ x8 j) ?) Z$ W/ z
- | PH12 <-> FMC_D20 | PI6 <-> FMC_D28 |
! m7 J: m/ l& v( ~ - | PH13 <-> FMC_D21 | PI7 <-> FMC_D29 |
9 G1 q' G! h0 |/ Z5 ~) ~ - | PH14 <-> FMC_D22 | PI9 <-> FMC_D30 |
% e. ^ t# s8 V' i" C% q - | PH15 <-> FMC_D23 | PI10 <-> FMC_D31 |5 A' W+ {' g! y, U- Z2 R0 Y
- +------------------+-------------------+
' l0 E3 u$ h" Y. i - */
2 v4 Z6 H) C3 g9 S
8 ]0 f. B, Y, X- s# L- /*
& m9 j- J8 j" s! p8 H - 控制AD7606参数的其他IO分配在扩展的74HC574上
- N/ ] b5 S! T& ~7 f" L - X13 - AD7606_OS0' g+ W! X) C, _1 N& i0 W+ [0 g6 P
- X14 - AD7606_OS1
% ~6 l. r4 w9 G$ V0 c) H - X15 - AD7606_OS2
& D2 `: O* G& X5 \8 i& ^ - X24 - AD7606_RESET
\7 n3 D2 u& [+ v' `# b - X25 - AD7606_RAGE
+ C/ L2 s1 k! Q. p" c" j
8 t8 o4 y: r, P- PE5 - AD7606_BUSY
3 _; G! G! y+ s: G7 R9 T) q) u - */
& o$ ] ^2 d# |; P+ w7 O) V' J - static void AD7606_CtrlLinesConfig(void), r* L+ B) H' q. F! F
- {
2 { X' g" j! M3 X h& R& @ - /* bsp_fm_io 已配置fmc,bsp_InitExtIO();$ K3 b7 _+ i0 D
- 此处可以不必重复配置 n4 V A1 l. @+ @7 ~1 _* H3 V* m- [
- *// P0 P$ P; ^/ L c* a
- - H* D2 h! {" [9 s* c! A
- GPIO_InitTypeDef gpio_init_structure;. Z" I! |, O/ P- ~5 t7 @* q
- & P4 S# C' ]. T/ x! @
- /* 使能 GPIO时钟 */! l2 F. j, z7 x: S6 v
- __HAL_RCC_GPIOD_CLK_ENABLE();6 e! l$ }" k! S. ?6 {2 T9 U
- __HAL_RCC_GPIOE_CLK_ENABLE();
0 P9 C- ~" {. j - __HAL_RCC_GPIOF_CLK_ENABLE();
. E: Z7 B' L& Z1 U' a5 R - __HAL_RCC_GPIOG_CLK_ENABLE();
5 {; |8 A$ M# a - __HAL_RCC_GPIOH_CLK_ENABLE();
+ s2 y1 q n( h) c( J1 ^, x - __HAL_RCC_GPIOI_CLK_ENABLE();
3 ?6 V) F3 I4 f! H4 M - 0 r, w c/ l: c- G# T2 n; w! I$ s% Z
- /* 使能FMC时钟 */
2 I1 |% T% h' d, \# { - __HAL_RCC_FMC_CLK_ENABLE();% V$ N4 k0 T1 U+ W; z
' w4 _5 M% d6 q; |6 G# l! h2 H- /* 设置 GPIOD 相关的IO为复用推挽输出 */; h+ K! d& a- F4 J
- gpio_init_structure.Mode = GPIO_MODE_AF_PP;5 q; P8 f6 l |7 K# Z; R
- gpio_init_structure.Pull = GPIO_PULLUP;
* W! M1 \' [6 B2 X1 j8 |6 F* T - gpio_init_structure.Speed = GPIO_SPEED_FREQ_HIGH;3 I3 N# Q' a5 `/ \1 s5 R
- gpio_init_structure.Alternate = GPIO_AF12_FMC;8 i& ]0 s5 W1 g) i
+ f. |& g2 ?# C' Q$ R- /* 配置GPIOD */& U2 u5 s$ ^. p4 Q: N- n5 i% V9 ?, i
- gpio_init_structure.Pin = GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_7 |
/ q- p$ h4 F& d- Z. _. j4 @+ @ - GPIO_PIN_8 | GPIO_PIN_9 | GPIO_PIN_10 | GPIO_PIN_14 |3 r' h6 s- a$ c% m6 B! K
- GPIO_PIN_15;
7 O, X7 g. C- T, W7 f. k - HAL_GPIO_Init(GPIOD, &gpio_init_structure);
; R" W$ j3 L' t+ v3 |$ f
8 @; {+ q2 B4 Q+ l- /* 配置GPIOE */
[8 [, ?+ W. g$ s) A3 V# o. Q - gpio_init_structure.Pin = GPIO_PIN_7 | GPIO_PIN_8 | GPIO_PIN_9 | GPIO_PIN_10 |
) i/ e: f4 r7 T$ s" l - GPIO_PIN_11 | GPIO_PIN_12 | GPIO_PIN_13 | GPIO_PIN_14 |
5 O! l3 h6 A9 G' ]9 ^: d - GPIO_PIN_15;
' k. \& s( N) ]6 J5 d' P( Z3 i, [! d - HAL_GPIO_Init(GPIOE, &gpio_init_structure);3 k; o" l! ^1 _
- + \3 l/ x5 D2 ~! ]
- /* 配置GPIOG */
2 M/ J" u y, }6 x- b - gpio_init_structure.Pin = GPIO_PIN_0 | GPIO_PIN_1;
7 l$ n+ a2 K( C+ c6 C - HAL_GPIO_Init(GPIOG, &gpio_init_structure);) O" [# U$ Y9 s( k" p. G0 A" |
- g" l1 V9 z6 t8 G
- /* 配置GPIOH */1 B& Z$ Y/ @5 p4 {
- gpio_init_structure.Pin = GPIO_PIN_8 | GPIO_PIN_9 | GPIO_PIN_10 | GPIO_PIN_11 | GPIO_PIN_12, E. g- `3 _ w, O. C3 q
- | GPIO_PIN_13 | GPIO_PIN_14 | GPIO_PIN_15;' c! K8 z+ M8 _
- HAL_GPIO_Init(GPIOH, &gpio_init_structure);3 k2 z, D2 g2 I$ J8 A3 c
, `' J& @2 t; Z# G+ {1 f- /* 配置GPIOI */
}. X1 {( d, v" ^1 ?' D. R; J - gpio_init_structure.Pin = GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3 | GPIO_PIN_6
$ E* N" e" W* i4 V* ]3 A- R - | GPIO_PIN_7 | GPIO_PIN_9 | GPIO_PIN_10;) k5 {1 h' J# L6 d" v" }
- HAL_GPIO_Init(GPIOI, &gpio_init_structure);1 n% ~! ^- i _- u+ {/ H
- ( g' d/ h. b6 q. @
- /* CONVST 启动ADC转换的GPIO = PC6 */- ~! t1 i' r7 P6 C
- {3 z' s b) O8 g. F7 r$ O$ b
- GPIO_InitTypeDef GPIO_InitStructure;: ?# E V& x$ e" q* `: o( x5 F; v6 L
- CONVST_RCC_GPIO_CLK_ENABLE();# o7 L5 t4 t7 F6 y3 X2 u% c( G1 D$ P/ p
) _# f5 L) W7 o- /* 配置PC6 */5 V+ A. g1 |. e
- GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; /* 设置推挽输出 */
5 {8 U$ P% T* Q* B - GPIO_InitStructure.Pull = GPIO_NOPULL; /* 上下拉电阻不使能 */
( p3 C3 Q5 Y8 u/ _" H+ N) I& r - GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_MEDIUM; /* GPIO速度等级 */
2 x5 T* i% t! X" m - & f) G8 N# k( G7 W1 u; k
- GPIO_InitStructure.Pin = CONVST_PIN;
6 v4 C7 t8 J8 y4 ^8 f. E( L% a - HAL_GPIO_Init(CONVST_GPIO, &GPIO_InitStructure); 7 O0 z' l9 V3 {& B0 S
- }6 a% a) x: C3 S* Z7 c8 t
- }
* N: J* u L5 l; U; `. q这里重点注意AD7606_CONVST,上电后的默认配置是普通IO。另外还有过采样的3个引脚,量程配置的1个引脚和复位控制的1个引脚,均通过V7板子的扩展IO实现:. X( B; F6 X; U, Z! e
2 r1 M7 M$ `7 u# v0 i: c; M: ]
- /* 设置过采样的IO, 在扩展的74HC574上 */
9 B+ f* A) F+ ?- i$ v) f. a - #define OS0_1() HC574_SetPin(AD7606_OS0, 1)4 h; g7 \( T. V0 ^' X5 E. S
- #define OS0_0() HC574_SetPin(AD7606_OS0, 0)" o: I; m' e' [8 S9 `- d8 k
- #define OS1_1() HC574_SetPin(AD7606_OS1, 1)/ Q" r4 I& Q$ a' R
- #define OS1_0() HC574_SetPin(AD7606_OS1, 0)) P) @' Q$ K! Z- F, r+ W
- #define OS2_1() HC574_SetPin(AD7606_OS2, 1)
/ U7 ^5 }& B3 _$ E% I* [/ H+ z - #define OS2_0() HC574_SetPin(AD7606_OS2, 0)
! x% N7 F" j' q6 N
0 d5 y' g! I4 J- /* 设置输入量程的GPIO, 在扩展的74HC574上 */0 p# t8 L/ f" Q$ ?4 Y' c
- #define RANGE_1() HC574_SetPin(AD7606_RANGE, 1)
& i9 v4 i. s/ \+ g' k9 g$ L - #define RANGE_0() HC574_SetPin(AD7606_RANGE, 0)
4 b, }9 l7 h, { - + y4 l4 t& E) Q6 p J
- /* AD7606复位口线, 在扩展的74HC574上 */
" E( B: z8 v% P b' s/ N; F - #define RESET_1() HC574_SetPin(AD7606_RESET, 1)( h5 p. j7 r8 u/ U( x( D; m0 \
- #define RESET_0() HC574_SetPin(AD7606_RESET, 0)
77.7.2 第2步,FMC的时钟源选择6 }- z$ Z, V9 S" ^; k
使用FMC可以选择如下几种时钟源HCLK3,PLL1Q,PLL2R和PER_CK:# _0 [- `! |& k' X$ J7 ^/ u! D
, z$ j/ E7 O) f9 _& _0 ~6 ~
" Z. n- o6 z' f3 {$ Q
4 L7 [1 W6 ~1 v/ ]/ s3 d o
1 h0 X4 L; }& {8 o. q6 l& ]. y6 \我们这里直接使用HCLK3,配置STM32H7的主频为400MHz的时候,HCLK3输出的200MHz,这个速度是FMC支持的最高时钟,正好用于这里:* d0 {+ p9 Y6 A: R" s* r, }% B
$ Q. U6 H- v# K1 @
5 D' ]0 U( K3 i( }& N: X$ O( W6 }) q. n% j( n5 w
77.7.3 第3步,FMC的时序配置(重要)) R1 K+ z E3 n. ~
由于操作AD7606仅需要读操作,而且使用的是FMC总线的Mode_A,那么仅需按照如下时序图配置好即可:
& v& e+ C8 a/ Q% J9 Z) @
2 K4 r9 B3 O2 J6 }2 h9 O! Z6 J
9 o7 H R( m# r) g4 \1 h) i; M
根据这个时序图,重点配置好ADDSET地址建立时间和DATAST数据建立时间即可。- `4 ?5 B- w3 L$ o' n7 d
# v8 D- X$ L- j* d0 a5 M" ^5 f4 q, m DATAST(DataSetupTime,数据建立时间)
" O" _% M3 Z# g2 Y+ @% v4 a8 oDATAST实际上对应的就是76.4.4小节里面的t10 。RD读信号的低电平脉冲宽度,通信电压不同,时间不同,对于STM32来说,FMC通信电平一般是3.3V,即最小值21ns。
) q" v7 x5 P1 G6 ~0 U
0 k3 ]$ `7 H) Y# A% K4 w% U* }- q2 ?2 H
\6 `& a* ?0 J. o6 y ADDST(AddressSetupTime,地址建立时间)
# N( M5 Y9 X2 ]4 SDATAST实际上对应的就是76.4.4小节里面的t11 或者t12。+ |- T D) S6 h
1 y: ~& E6 I' U& F# x/ Z% z% z
如果采用CS(NEx)片选和RD(NOE)读信号独立方式,对应的时间最小15ns,即t11 。
/ l3 o+ x% R8 P8 f 如果采用CS(NEx)片选和RD(NOE)读信号并联方式,对应的时间最小22ns,即t12 。
+ A/ F$ n/ U( J6 m: b+ Q我们这里将t12作为最小值更合理,因为CS(NEx)片选信号,每读取完毕一路,拉高一次。
; X/ i; W6 |" k$ o2 P W* ^- B2 Y4 F) X8 x3 g
有了这些认识后,再来看FMC的时序配置就比较好理解了:
/ P- Y+ n! @* | b0 Z
m" t, n/ O; E8 Q, d% M" u- 1. /*
: `* ^9 [$ z6 P( Q. ~ - 2. ******************************************************************************************************
& U3 F5 h# t! Z8 B - 3. * 函 数 名: AD7606_FSMCConfig/ j* c) t; ^9 F
- 4. * 功能说明: 配置FSMC并口访问时序
5 U2 l9 m. L Q4 I, ~2 ^ - 5. * 形 参: 无
, v- H3 }( u2 j; _! v - 6. * 返 回 值: 无* U9 a8 L. v- {: L$ ~# u
- 7. ******************************************************************************************************
6 A! m* z0 H6 F0 @8 f( c - 8. */
E5 @. o4 \, z3 M. x+ M - 9. static void AD7606_FSMCConfig(void)6 \ C+ x v8 E" B2 y
- 10. {
, e4 D0 b$ A9 J5 a. M0 z G+ E - 11. /* " F" L9 `4 s6 D' M" q
- 12. DM9000,扩展IO,OLED和AD7606公用一个FMC配置,如果都开启,请以FMC速度最慢的为准。% g* |2 `9 H5 h6 Q7 o1 {, n- [$ R
- 13. 从而保证所有外设都可以正常工作。) _5 I. x; M7 N' E9 J: ?" [/ y: b
- 14. */6 ]9 h9 R7 R2 g! I' f1 Z# M8 K
- 15. SRAM_HandleTypeDef hsram = {0};
. J# R! h' j/ \" j# e - 16. FMC_NORSRAM_TimingTypeDef SRAM_Timing = {0};
+ ?/ G, Z3 |9 F6 X) X8 e7 R0 c2 j - 17.
( F0 k" z- i3 f( @" ~ - 18. /*
2 b3 o4 d% n( z. Y0 B7 y; O - 19. AD7606规格书要求(3.3V时,通信电平Vdriver):RD读信号低电平脉冲宽度最短21ns,对应DataSetupTime
8 v% _" o. j# U- M' Y# _4 |+ _' Y - 20. CS片选和RD读信号独立方式的高电平脉冲最短宽度15ns。. i! J4 i! R. K: a3 w$ j
- 21. CS片选和RD读信号并联方式的高电平脉冲最短宽度22ns。
' o7 B8 J, B, g( g - 22. 这里将22ns作为最小值更合理些,对应FMC的AddressSetupTime。- l+ K# M) j& [4 l+ s: {& E
- 23.
( J) Q$ J$ ~2 f0 G) [ - 24. 5-x-5-x-x-x : RD高持续25ns, 低电平持续25ns. 读取8路样本数据到内存差不多就是400ns。
& P3 A8 ~- r* B% B8 F, N$ K - 25. */
: L/ [; k% t, ?) H; t. m U [ - 26. hsram.Instance = FMC_NORSRAM_DEVICE;
4 X+ p9 A6 q3 k - 27. hsram.Extended = FMC_NORSRAM_EXTENDED_DEVICE;9 |3 v9 y' j/ y" t8 y1 U! a, p
- 28. ) J9 b' f; h5 V- w B6 y. H
- 29. /* FMC使用的HCLK3,主频200MHz,1个FMC时钟周期就是5ns */* B' E9 f8 G" H7 u
- 30. SRAM_Timing.AddressSetupTime = 5; /* 5*5ns=25ns,地址建立时间,范围0 -15个FMC时钟周期个数 */9 C. ^& U" K6 B& H7 G+ r& ^
- 31. SRAM_Timing.AddressHoldTime = 2; /* 地址保持时间,配置为模式A时,用不到此参数 范围1 -15个
9 b1 I3 i, o* ?$ B - 32. 时钟周期个数 */
4 z5 w. Z+ i3 r& @ - 33. SRAM_Timing.DataSetupTime = 5; /* 5*5ns=25ns,数据建立时间,范围1 -255个时钟周期个数 */' t" L" l3 A8 d- q% `( o9 j" j
- 34. SRAM_Timing.BusTurnAroundDuration = 1; /* 此配置用不到这个参数 */
t( l$ V5 a$ R1 ^" l5 S5 ? - 35. SRAM_Timing.CLKDivision = 2; /* 此配置用不到这个参数 */9 G9 J: X. x' J) P0 T
- 36. SRAM_Timing.DataLatency = 2; /* 此配置用不到这个参数 */9 g6 ]/ C/ n' J, Q
- 37. SRAM_Timing.AccessMode = FMC_ACCESS_MODE_A; /* 配置为模式A */
- F* f1 w6 A( z: f: i - 38. hsram.Init.NSBank = FMC_NORSRAM_BANK1; /* 使用的BANK1,即使用的片选
N0 h5 n2 E; k( [% D/ |, z9 s0 O - 39. FMC_NE1 */
2 Y* a( Y W8 P# w - 40. hsram.Init.DataAddressMux = FMC_DATA_ADDRESS_MUX_DISABLE; /* 禁止地址数据复用 */
' f! M I7 S0 E( _9 D0 l+ A) T - 41. hsram.Init.MemoryType = FMC_MEMORY_TYPE_SRAM; /* 存储器类型SRAM */ Y& a1 o) F% E" |
- 42. hsram.Init.MemoryDataWidth = FMC_NORSRAM_MEM_BUS_WIDTH_32; /* 32位总线宽度 */
9 C( h5 A$ e- @& X1 U/ t3 w* {3 y5 | - 43. hsram.Init.BurstAccessMode = FMC_BURST_ACCESS_MODE_DISABLE; /* 关闭突发模式 */ ?( G0 M5 \4 b
- 44. hsram.Init.WaitSignalPolarity = FMC_WAIT_SIGNAL_POLARITY_LOW; /* 用于设置等待信号的极性,关闭突. a$ l( T8 W5 I3 M. S- ~4 ~; @# n
- 45. 发模式,此参数无效 */
# Y* O( n$ }' @' b1 P9 ^ - 46. hsram.Init.WaitSignalActive = FMC_WAIT_TIMING_BEFORE_WS; /* 关闭突发模式,此参数无效 */) ~" E; x* |' E$ u( a0 p
- 47. hsram.Init.WriteOperation = FMC_WRITE_OPERATION_ENABLE; /* 用于使能或者禁止写保护 */
9 V4 }8 X# X; U' r1 h# ? - 48. hsram.Init.WaitSignal = FMC_WAIT_SIGNAL_DISABLE; /* 关闭突发模式,此参数无效 */7 `: K* k' R. l! a* }6 Z, L
- 49. hsram.Init.ExtendedMode = FMC_EXTENDED_MODE_DISABLE; /* 禁止扩展模式 */# |: h. \" J: D3 Y% r
- 50. hsram.Init.AsynchronousWait = FMC_ASYNCHRONOUS_WAIT_DISABLE; /* 用于异步传输期间,使能或者禁止
; i7 _, l5 l; H" o5 n - 51. 等待信号,这里选择关闭 */
6 U' G* Q5 W, z/ G' b3 Y y3 r' {# J - 52. hsram.Init.WriteBurst = FMC_WRITE_BURST_DISABLE; /* 禁止写突发 */
! v, w; M$ n. F. B$ N* b* V% r6 x" _; s - 53. hsram.Init.ContinuousClock = FMC_CONTINUOUS_CLOCK_SYNC_ONLY; /* 仅同步模式才做时钟输出 */* H, @& r/ I1 Y
- 54. hsram.Init.WriteFifo = FMC_WRITE_FIFO_ENABLE; /* 使能写FIFO */
% Y1 {$ Y1 h ] - 55.
9 o1 `8 ]: y+ B6 J - 56. /* 初始化SRAM控制器 */" p; ^ O0 q) j0 e
- 57. if (HAL_SRAM_Init(&hsram, &SRAM_Timing, &SRAM_Timing) != HAL_OK)2 i& G# a2 |6 N+ d& I6 P
- 58. {% \( E" D& m( c
- 59. /* 初始化错误 */
A7 Q) ^/ J" H: a0 J7 A; ^ - 60. Error_Handler(__FILE__, __LINE__);
* D' K+ y: ^: ?" a$ q - 61. } % S$ I) l; P T. \
- 62. }
这里把几个关键的地方阐释下:9 J2 q: ~/ r# U7 `
$ @: z( K$ k3 s/ R$ Y- N* w 第15- 16行,对作为局部变量的HAL库结构体做初始化,防止不确定值配置时出问题。# N; d6 h: w) m* E8 K/ t
第30行,地址建立时间,对于AD7606来说,这个地方最小值22ns。保险起见,这里取值5个FMC时钟周期,即25ns。' s, [: s; C" A: b- G6 o' n
第31行,地址保持时间,对于FMC模式A来说,此参数用不到。3 Q( V9 e8 p0 a) b# Q" ~" r! L, v
第33行,数据建立时间,对于AD7606来说,这个地方最小值是21ns,保险起见,这里取值5个FMC时钟周期,即25ns。) S( Z/ ]- M: i7 T$ o1 x
第34 – 36行,当前配置用不到这三个参数。( c: D' b# q& f: {. {; C- j' E& F
第38行,使用的BANK1,即使用的片选FMC_NE1。' V, ]8 p, u$ P( K! V1 o4 ?
77.7.4 第4步,FMC的MPU配置
' Q+ _ i; G1 {3 \5 Z x. t9 e实际测试发现,使能FMC_NE1所管理的存储区的Cache功能后,会出现扩展IO的NE片选和NWE信号输出2次的问题。经过各种Cache方式配置、FMC带宽配置、操作FMC时的数据位宽设置,发现禁止了Cache功能就正常了,也就是说,设置FMC_NE1所管理的存储区MPU属性为Device或者Strongly Ordered即可。5 z) d! j4 m$ E8 k2 O/ ^( a# [
* o- E* ?" ^, I+ B! ]% g
/* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
# ?& M% A1 ~/ A- F) ]1 O( u MPU_InitStruct.Enable = MPU_REGION_ENABLE;7 G+ Q. v: e) ^3 C* ^& w) a5 r! r
MPU_InitStruct.BaseAddress = 0x60000000;5 J% z( ]6 e" \" v) e: O8 N! Z
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB; ; d* l1 @0 Y4 f/ D' x; |
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
. E2 R% B) R- ]" q, o4 w( M' H MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;) {6 P' \" a5 g r( J% R
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;6 O7 A# X, |) Y
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
/ n; \; p6 S) i& i3 a( g( h% v MPU_InitStruct.Number = MPU_REGION_NUMBER1;& H% Q: l4 o3 B7 N5 U# Y I4 q
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;6 r0 U1 k' [ {4 ^, b
MPU_InitStruct.SubRegionDisable = 0x00;9 \6 T* V5 Y7 C6 N( u% S8 x# w# i
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;' R* ` v0 P* I( C: a4 [. T# P7 N
# k) h+ b/ Y' U: p# q! O) N' H HAL_MPU_ConfigRegion(&MPU_InitStruct);
5 D( ^# S4 }- r0 ^4 T6 tMPU配置中直接从FMC_NE1的首地址开始配置,设置了64KB空间的属性。将FMC_NE1通过译码器所管理的所有设备地址全部设置为此配置:! u4 y# O7 S' p6 t$ B2 X G
# t# L( V% v+ ^9 ]
. ^' ]9 {( N" y/ C4 K$ j* O" t5 c
, i" T& i8 V) ~9 H2 ]77.7.5 第5步,AD7606的FMC DMA实现(核心)+ h0 e* N+ }4 u) P, z4 f
这部分代码是本章77.6小节的完美体现:
( u; x' o; S! ?1 A1 p2 ?5 l
4 _ A! C; W+ W. l% P- 1. static void AD7606_SetTIMOutPWM(TIM_TypeDef* TIMx, uint32_t _ulFreq)/ D# c# l* f' @. n4 A0 X( `9 m
- 2. {1 C: ?; j" Z% Y/ d" D: H& I
- 3. TIM_OC_InitTypeDef sConfig = {0};
2 L! Q1 H4 ]* W9 X$ M - 4. GPIO_InitTypeDef GPIO_InitStruct;
5 T- b+ ]' N! b - 5. uint16_t usPeriod;
( I; e" \0 u, T - 6. uint16_t usPrescaler;7 m* a4 E Q7 S% c& {6 \7 s
- 7. uint32_t uiTIMxCLK;
: }' h; j- ` n3 _! F8 o% L# h - 8. uint32_t pulse;" x# K) A8 I8 J* O9 A
- 9.
# C& Z2 n% R8 \* x$ {% @8 K- b - 10. 3 w9 d- _/ Y8 Q4 y0 ^8 B
- 11. /* 配置时钟 */1 [/ F; O8 T- m8 G
- 12. CONVST_RCC_GPIO_CLK_ENABLE();4 O4 u# o; ~) u' J; u) X( \: C
- 13. CONVST_TIM8_CLK_ENABLE();2 M2 k$ ^, h- P6 l& f
- 14. TIMx_UP_DMA_STREAM_CLK_ENABLE();
' X) t8 b6 w8 c, y - 15.
J: E$ c0 I5 S* i9 U - 16. /* 配置引脚 */
1 ~, j. |9 _7 i+ n0 W& q - 17. GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;8 ~$ f% D- y0 o- J5 Z, l6 i& f
- 18. GPIO_InitStruct.Pull = GPIO_PULLUP;% ?! K, h( [6 [, B; U% E4 R
- 19. GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;# x" D% C- _% ~( D7 t% g
- 20. GPIO_InitStruct.Alternate = CONVST_AF;! c& T& Y" F* Z1 r
- 21. GPIO_InitStruct.Pin = CONVST_PIN;: q' ^6 b' U0 B4 A O& l
- 22. HAL_GPIO_Init(CONVST_GPIO, &GPIO_InitStruct);
; L! \# u2 w: u V& g5 K7 s3 g - 23.
2 u9 E2 F0 {' H' K8 v2 T+ C1 E6 H - 24. /*-----------------------------------------------------------------------3 v4 T8 i/ ^0 M2 _9 @6 s( H% {
- 25. bsp.c 文件中 void SystemClock_Config(void) 函数对时钟的配置如下:
. x; k2 u' a9 @* _0 z& k - 26. ( O1 Z1 X3 K$ _4 g0 [& {" j
- 27. System Clock source = PLL (HSE)
( j. V: J' l9 `1 A" H( `% d2 H) Y - 28. SYSCLK(Hz) = 400000000 (CPU Clock)
8 L% P8 L! H9 k% F+ B) ?! c2 q - 29. HCLK(Hz) = 200000000 (AXI and AHBs Clock)
7 i* p6 A, _" T' B$ |& q9 V - 30. AHB Prescaler = 2
* i3 I. \* D$ C) O. w% [0 S - 31. D1 APB3 Prescaler = 2 (APB3 Clock 100MHz): T, U' b0 e& |& ^, \) q
- 32. D2 APB1 Prescaler = 2 (APB1 Clock 100MHz)
: {* ?' d0 R, R) K7 M - 33. D2 APB2 Prescaler = 2 (APB2 Clock 100MHz)
" \* A$ G5 q; t4 ]# r - 34. D3 APB4 Prescaler = 2 (APB4 Clock 100MHz)$ c4 W. |, x( z9 d A# y* O
- 35. - F0 Y0 j$ J2 Y1 o7 {
- 36. 因为APB1 prescaler != 1, 所以 APB1上的TIMxCLK = APB1 x 2 = 200MHz;! }+ i* K: M+ Q' ^
- 37. 因为APB2 prescaler != 1, 所以 APB2上的TIMxCLK = APB2 x 2 = 200MHz;
2 V5 b7 z8 C6 j$ M3 u - 38. APB4上面的TIMxCLK没有分频,所以就是100MHz;
% T+ n; ]3 U3 u$ p/ N9 ^ - 39. 8 r- W* b! e" z j$ `6 @
- 40. APB1 定时器有 TIM2, TIM3 ,TIM4, TIM5, TIM6, TIM7, TIM12, TIM13, TIM14,LPTIM1
4 n3 W3 I h! V# _* e) @; g - 41. APB2 定时器有 TIM1, TIM8 , TIM15, TIM16,TIM17$ E( g: O6 ~2 O- B! t
- 42.
& V1 R. D1 f6 H- p - 43. APB4 定时器有 LPTIM2,LPTIM3,LPTIM4,LPTIM5( v# Z# D! M3 e; U$ M
- 44. " G$ e) D% Q5 B3 p
- 45. ----------------------------------------------------------------------- */
. z) g3 T* \( D3 m) ^ z( y3 ^ - 46. if ((TIMx == TIM1) || (TIMx == TIM8) || (TIMx == TIM15) || (TIMx == TIM16) || (TIMx == TIM17))' y" v( U+ m6 I% N
- 47. {& f+ G d0 _" t2 o. i
- 48. /* APB2 定时器时钟 = 200M */; x! ^6 Q& t; r, I! S6 V
- 49. uiTIMxCLK = SystemCoreClock / 2;+ X, c( d8 T% b4 v1 m. N
- 50. }# C7 d: t5 p& P' q" p
- 51. else ! e$ D4 e7 O: ^# y) r% d; l
- 52. {
* ~# _! ~/ R3 V6 K; p0 H - 53. /* APB1 定时器 = 200M */. a5 x& ~ n0 e }6 v* g
- 54. uiTIMxCLK = SystemCoreClock / 2;
/ E4 N" b; W0 k. Q2 ^- m1 ]( K# N/ M3 Z - 55. }: N. W1 }7 c6 J% p0 w- {9 }
- 56. 1 b/ c4 m+ x# p* g
- 57. if (_ulFreq < 100)3 H- i$ ^) c9 r8 Y6 ^
- 58. {6 a9 ^$ E( Z. A7 S7 T
- 59. usPrescaler = 10000 - 1; /* 分频比 = 10000 */. f a9 ^; ]7 c) l' x
- 60. usPeriod = (uiTIMxCLK / 10000) / _ulFreq - 1; /* 自动重装的值, usPeriod最小值200, 单位50us*/& L- }. }' t( W& U9 r! L8 G
- 61. pulse = usPeriod; /* 设置低电平时间50us,注意usPeriod已经进行了减1操作 */9 Y0 s; z* C5 b# O
- 62. }
$ [9 l* a/ C) T, ~1 ^4 z6 A5 R2 P' [9 U - 63. else if (_ulFreq < 3000)
4 C. h% x9 y& [ w* P - 64. {
6 p9 `: x H; Q! f - 65. usPrescaler = 100 - 1; /* 分频比 = 100 */
2 L J: v) f5 l+ Q3 y& Z - 66. usPeriod = (uiTIMxCLK / 100) / _ulFreq -1;/* 自动重装的值, usPeriod最小值666,单位500ns */2 G( R: p" b% U& P0 t5 V* R
- 67. pulse = usPeriod-1; /* 设置低电平时间1us,注意usPeriod已经进行了减1操作 */
! ]# d: |% U; l - 68. }
. X& w1 r0 G {7 k# c5 E - 69. else /* 大于4K的频率,无需分频 */* p+ F6 x2 o/ v1 g) h1 k
- 70. {, F1 n/ }: m- r2 ?4 B
- 71. usPrescaler = 0; /* 分频比 = 1 */
7 P/ q" I* E+ t - 72. usPeriod = uiTIMxCLK / _ulFreq - 1; /* 自动重装的值, usPeriod最小值1000,单位5ns */
, c1 y9 i) K8 u9 O$ T7 b; P - 73. pulse = usPeriod - 199; /* 设置低电平时间1us,注意usPeriod已经进行了减1操作 */
' c6 y8 P" f3 W: ?8 u' v - 74. }% T- u' a/ t0 n* O2 G5 t
- 75.
8 X' g/ w1 j0 l! {' R - 76. /* PWM频率 = TIMxCLK / usPrescaler + 1)/usPeriod + 1)*/
3 d; {8 j; U& E - 77. TimHandle.Instance = TIMx;
, f8 m/ @2 n( V @0 y" K - 78. TimHandle.Init.Prescaler = usPrescaler; /* 用于设置定时器分频 */" U$ }$ m# `- K) ]2 b: C
- 79. TimHandle.Init.Period = usPeriod; /* 用于设置定时器周期 */
# P' [9 e. f1 x C - 80. TimHandle.Init.ClockDivision = 0; /* 用于指示定时器时钟 (CK_INT) 频率与死区
( Y* l9 f7 Y2 Z7 t$ K6 z - 81. 发生器以及数字滤波器(ETR、 TIx)所使用. {: a9 y6 }3 t6 _( j5 S) Z
- 82. 的死区及采样时钟 (tDTS) 之间的分频比*/6 A$ {- a6 U) ?* O" s
- 83. TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 用于设置计数模式,向上计数模式 */" F% C' e( g( E6 {
- 84. TimHandle.Init.RepetitionCounter = 0; /* 用于设置重复计数器,仅 TIM1 和 TIM8 有,其它定时器没有 */
4 J* C9 |! V3 r$ l9 o( T7 x - 85. TimHandle.Init.AutoReloadPreload = 0; /* 用于设置定时器的 ARR 自动重装寄存器是更新事件产生时写入有$ _" O) E8 Z: k
- 86. 效 */+ C+ v: H. t+ i6 ^8 U4 W
- 87. X+ {4 W4 [- l& B
- 88. if (HAL_TIM_PWM_DeInit(&TimHandle) != HAL_OK)
1 ^5 D4 H, i- G8 D5 X - 89. {
( b/ n2 O/ I7 O" V; l - 90. Error_Handler(__FILE__, __LINE__); ) S1 C4 c$ u- C! b, i
- 91. }* l% t; _. d6 f; ?" U5 t [) l
- 92. , w$ m& O# P- B8 Q4 g' T M1 b
- 93. if (HAL_TIM_PWM_Init(&TimHandle) != HAL_OK)
6 h4 B# A1 } M$ C6 ^ - 94. {; H6 X8 h0 D% Q9 ] e3 d, l% {
- 95. Error_Handler(__FILE__, __LINE__);! ^1 c& N7 Q; c
- 96. }# x' E! B# p5 V' _7 Y8 @7 z
- 97. & i- Q5 t% g4 b. ~/ m
- 98. /* 配置定时器PWM输出通道 */
3 B) o2 \3 y/ }1 n, g2 w - 99. sConfig.OCMode = TIM_OCMODE_PWM1; /* 配置输出比较模式 */4 S3 x& K. R: M' K9 L0 C8 s2 j5 A
- 100. sConfig.OCPolarity = TIM_OCPOLARITY_HIGH; /* 设置输出高电平有效 */9 Z- k$ M' m/ N2 f
- 101. sConfig.OCFastMode = TIM_OCFAST_DISABLE; /* 关闭快速输出模式 */
6 @1 D0 i' C' J7 n - 102. sConfig.OCNPolarity = TIM_OCNPOLARITY_HIGH; /* 配置互补输出高电平有效 */
: {) i l9 m; H- N - 103. sConfig.OCIdleState = TIM_OCIDLESTATE_SET; /* 空闲状态时,设置输出比较引脚为高电平 */( z( a- g$ `$ @4 O4 {- x* D
- 104. sConfig.OCNIdleState = TIM_OCNIDLESTATE_RESET; /* 空闲状态时,设置互补输出比较引脚为低电平 */( t% B& b! U4 `2 P* Y
- 105. , |, _6 u/ [9 R
- 106. /* 占空比 */% f* u1 j" C+ ?/ q9 w! d* R
- 107. sConfig.Pulse = pulse;
1 T; Q' i$ s* Q* i - 108. if (HAL_TIM_PWM_ConfigChannel(&TimHandle, &sConfig, CONVST_TIMCH) != HAL_OK)
- d: o1 v2 }5 _3 |6 c4 r F - 109. {
1 J5 e/ V2 v9 ^8 z! R. p% Z c - 110. Error_Handler(__FILE__, __LINE__); e7 s3 R5 j1 W
- 111. }% Q9 q2 y/ @) M5 N- D
- 112. 8 |8 R$ Y6 R+ I0 j9 x6 g
- 113. /* 使能定时器中断 */3 h* {- c3 H9 D1 Y8 r
- 114. __HAL_TIM_ENABLE_DMA(&TimHandle, TIM_DMA_UPDATE);1 s2 ^/ X( ~8 m7 m5 r* D7 a
- 115.
8 C+ N0 i* F# q - 116. /* 启动PWM输出 */7 i- r! P7 L& G$ F7 }- C
- 117. if (HAL_TIM_PWM_Start(&TimHandle, CONVST_TIMCH) != HAL_OK)6 V- a4 G( v0 n0 z/ Z" N* F1 J
- 118. {, o, N$ x% X6 I) x! j8 y
- 119. Error_Handler(__FILE__, __LINE__);
9 z2 z6 ~' K* y% d - 120. }
$ v% i* y! F, e5 C5 ]& r - 121.
+ _) ]; i: O# p8 E: t) i - 122. /* 定时器UP更新触发DMA传输 */
1 S8 J9 g' |8 x, v! M* x9 } - 123. TIMDMA.Instance = TIMx_UP_DMA_STREAM; /* 例化使用的DMA数据流 */
$ p, w; [; ^+ v A - 124. TIMDMA.Init.FIFOMode = DMA_FIFOMODE_ENABLE; /* 使能FIFO*/0 p: I$ t- k0 L$ K8 }4 a+ |/ M
- 125. TIMDMA.Init.FIFOThreshold = DMA_FIFO_THRESHOLD_FULL; /* 用于设置阀值 */
, w/ q, L+ W1 t2 |8 h7 U r+ U - 126. TIMDMA.Init.MemBurst = DMA_MBURST_INC8; /* 用于存储器突发 */4 o& N! Y, c: i3 s
- 127. TIMDMA.Init.PeriphBurst = DMA_PBURST_INC8; /* 用于外设突发 */2 b4 s7 Z% ]# m$ J
- 128. TIMDMA.Init.Request = TIMx_UP_DMA_REQUEST; /* 请求类型 */
" {) e L: ?9 v) c) B2 ` - 129. TIMDMA.Init.Direction = DMA_PERIPH_TO_MEMORY; /* 传输方向是从外设到存储器 */
v# k) _# s6 g4 c$ P - 130. TIMDMA.Init.PeriphInc = DMA_PINC_DISABLE; /* 外设地址自增禁止 */
5 G. X6 r; T5 Z' j - 131. TIMDMA.Init.MemInc = DMA_MINC_ENABLE; /* 存储器地址自增使能 */
9 q, ~% ]" m q6 n8 p4 Z - 132. TIMDMA.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD; /* 外设数据传输位宽选择半字,即16bit */
' J! R+ C7 M( D6 k& o8 @) u3 X - 133. TIMDMA.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD; /* 存储器数据传输位宽选择半字,即16bit */
7 T5 ^3 [1 N& {/ E) l - 134. TIMDMA.Init.Mode = DMA_CIRCULAR; /* 循环模式 */
|. g# o0 _6 ^" q% F, M; k - 135. TIMDMA.Init.Priority = DMA_PRIORITY_LOW; /* 优先级低 */
+ z( w5 \7 c) ]7 }+ F" z - 136. 0 O$ |# g- Z" o9 T* \
- 137. /* 复位DMA */6 z4 [0 v, x1 ?7 D
- 138. if(HAL_DMA_DeInit(&TIMDMA) != HAL_OK)5 Z5 `, T$ i( k: i9 Y' J+ U
- 139. {+ F2 n5 T" Z& K5 R6 R% o1 W* L2 Z& d
- 140. Error_Handler(__FILE__, __LINE__); # C7 C+ c; Q8 O
- 141. }
8 C3 ^" ^6 Q+ V% P4 k. r - 142. 6 S1 v5 C }2 B& L
- 143. /* 初始化DMA */2 {; T7 U, h7 ~* |" A6 K$ ?
- 144. if(HAL_DMA_Init(&TIMDMA) != HAL_OK)* W+ r1 l* E- Q+ B+ f8 h
- 145. {
# k; \ y R3 C( O$ M - 146. Error_Handler(__FILE__, __LINE__);
3 H% K( t- R/ L1 h3 i - 147. }' s w+ _8 x9 W3 @1 R! Q, c
- 148. , V. Z3 }) |* n6 a* ~+ H
- 149. /* 关联DMA句柄到TIM */
; L3 Q+ a7 J9 W4 w3 R - 150. //__HAL_LINKDMA(&TimHandle, hdma[TIM_DMA_ID_UPDATE], TIMDMA);
" z! I3 k9 S; E- J$ P - 151. $ r) l7 B1 ~5 V, p' ]( f
- 152. /* 配置DMA中断 */) I* q5 O! c- @2 k, ^
- 153. HAL_NVIC_SetPriority(TIMx_UP_DMA_IRQn, 1, 0);
# ]! r$ b2 f* d' U - 154. HAL_NVIC_EnableIRQ(TIMx_UP_DMA_IRQn);
N7 D' q, i0 h( d - 155.
; ~9 w/ o" I3 D' H0 ] - 156. /* 注册半传输完成中断和传输完成中断 */# `5 ?! _ M. u. w# \
- 157. HAL_DMA_RegisterCallback(&TIMDMA, HAL_DMA_XFER_CPLT_CB_ID, AD7606_DmaCplCb);
: ^2 p4 x) Y, z% _7 G - 158. HAL_DMA_RegisterCallback(&TIMDMA, HAL_DMA_XFER_HALFCPLT_CB_ID, AD7606_DmaHalfCplCb);
- Z; \* H2 ]" k9 ` - 159.
* M, N# k- A6 R0 J( b4 s: H - 160. /* 启动DMA传输 */1 o% O! E/ M: W; W
- 161. HAL_DMA_Start_IT(&TIMDMA, (uint32_t)AD7606_BASE, (uint32_t)g_sAd7606Buf, AD7606_BUFSIZE);
: P ^. \) _5 ]1 U# _/ g - 162. }
% E1 p9 C+ X$ o4 Y( ? 第46 – 74行,配置PWM频率和占空比,特别是占比设计比较考究。
* a3 \; }/ a( |) R( d3 N# { 第123-135行,配置DMA,特别注意突发和FIFO设置,完全按照78.6.2小节配置。* r3 v7 b5 z: n0 I7 p1 z
第157-158行,注册半传输完成中断和传输完成中断的回调函数。4 P; s& A. I& Y
; K8 a6 k! S$ l: n; h' Q& D! v \2 C7 Y$ A: \3 G
77.7.6 第6步,FMC DMA双缓冲+ V4 c' Z7 v) P% f$ I
通过注册半传输完成中断和传输完成中断回调函数实现双缓冲:0 f% V9 Y+ M) |6 y
T: k3 u0 B, k6 ^
- /* DMA传输完成回调函数,弱定义 */
; _7 B* F8 [& _+ @/ Z4 I. u - __weak void AD7606_DmaCplCb(DMA_HandleTypeDef *hdma)
. Y# }. ], w3 s4 N; C; [ - {& H/ y* R% t# |2 q9 d
* O2 Y3 A* G2 d3 P" K/ Q- }8 d0 I; b& N! x1 A
- 1 y& `1 b: M+ e8 k4 p
- /* DMA半传输完成回调函数,弱定义 */: Y: ]3 `6 y) [# E' S9 x
- __weak void AD7606_DmaHalfCplCb(DMA_HandleTypeDef *hdma)
) N4 t* Y M6 x" \ - {0 B+ C. |; d, t
: V3 t; s. J! }3 x' p- }
比如用户设置的DMA缓冲是int16_t buf[16],那么进入半传输完成回调,用户就可以处理buf[0]到buf[7]里面的数据,进入传输完成中断里面,处理buf[8]到buf[15]里面的数据。
, O6 F& f/ L: J- ~0 s7 V, K9 D0 Z: w
77.7.7 第7步,AD7606过采样设置$ p2 q' C( x7 \2 \3 d7 {& Y8 ~3 V
AD7606的过采样实现比较简单,通过IO引脚就可以控制,支持2倍,4倍,8倍,16倍,32倍和64倍过采样设置。
3 q' D; D* y6 M2 I& q! _# {4 @, M: x& C/ S1 o2 y
- /*
! [! N% Y. w2 s; O: h( @9 H( S3 K" } - *********************************************************************************************************
% w* i! r" \ y1 v% V- z - * 函 数 名: AD7606_SetOS
( m. s/ ^7 a1 I3 K q; G - * 功能说明: 配置AD7606数字滤波器,也就设置过采样倍率。
9 G5 I* ]: c( y% x1 D - * 通过设置 AD7606_OS0、OS1、OS2口线的电平组合状态决定过采样倍率。
8 L' t" |. y: J5 `! N* a5 G - * 启动AD转换之后,AD7606内部自动实现剩余样本的采集,然后求平均值输出。 o4 _' \+ e E. f* N" T# R: h
- *
. l' I" I. t: d/ f6 q1 m. m3 D* O - * 过采样倍率越高,转换时间越长。
- S N! D9 I' W' q( b7 x# F - * 0、无过采样时,AD转换时间 = 3.45us - 4.15us9 X6 W, W2 \0 p; f5 Z2 ^6 E
- * 1、2倍过采样时 = 7.87us - 9.1us
& g# d% M* Z4 b. P - * 2、4倍过采样时 = 16.05us - 18.8us) S2 w8 p' U/ p% M7 |
- * 3、8倍过采样时 = 33us - 39us
3 i# c+ r }1 X' s; _$ @ - * 4、16倍过采样时 = 66us - 78us& B4 D' H5 {: u7 r" A- d2 I
- * 5、32倍过采样时 = 133us - 158us% ?3 h: J4 Q( R. F/ _! q
- * 6、64倍过采样时 = 257us - 315us1 {7 C2 u: n# M: \( c6 B( v2 K
- *0 ^; W8 I, _, Y' }/ A& R, O9 U# ~$ x
- * 形 参: _ucOS : 过采样倍率, 0 - 6' ]+ J% f' V- L( L5 c
- * 返 回 值: 无
4 @8 l% h( d8 M0 K1 E9 { - *********************************************************************************************************
* [: T$ w3 f1 H! c- W; \: o - */
! \( @ a4 w7 b; D7 K - void AD7606_SetOS(uint8_t _ucOS)9 k6 I+ q; O6 v& A2 ], _* t4 \4 ?
- {+ p( V+ P; c- Q: ~
- g_tAD7606.ucOS = _ucOS;
$ F H+ Q+ W C# Z) [$ I" n0 T - switch (_ucOS)# Z0 R( o0 a& c* f/ S
- {) u" k( I* T( i5 x- l9 J. N
- case AD_OS_X2:
) ?; j% u" o# C- V: n4 [/ R - OS2_0();
$ J4 _4 n, C7 M+ T/ Z - OS1_0();
2 ?9 b! n; c* ^# D2 j& ` i1 B - OS0_1();8 `2 k7 I/ H. R/ d3 v
- break;
: x0 G* j: @+ M
+ b( @8 ]! O0 R& c( W+ X- case AD_OS_X4:
+ f( k$ o x7 O& K K) M/ x5 y - OS2_0();# y: H$ D, b' B. L; d
- OS1_1();" O, }1 c6 f6 X4 W4 Q
- OS0_0();% b; \1 g% e9 W
- break;* @% h! E0 R2 l
( _3 K+ u, B2 C1 @( I/ k ~ D- case AD_OS_X8:: g4 y, e! @7 `, \) A5 G
- OS2_0();4 o& A% A8 q1 B: n" X N
- OS1_1();
- P# C, v) `1 B. ~ K3 G0 | - OS0_1();6 o& s! U- k9 T
- break;
- B, R' m1 B, m% m* |6 [$ R - $ |4 C, Q% F: T F5 M& h! m7 e8 w" W
- case AD_OS_X16:
+ C( Z, L' d# P* V- h8 A - OS2_1();
# o8 p( s) X0 i2 Q% r" a4 \3 d - OS1_0();
9 d/ e; E' O K" n4 { - OS0_0();
' [, P# l' F% _, E$ w# s - break;
0 {- p U: }- F
9 y0 f' d& `! I# W, M( q- case AD_OS_X32:
1 |( E' v5 x9 R5 {' S - OS2_1();8 ~% L( O: d: m6 o! X9 U9 C7 a
- OS1_0();
% C% O T7 T- ?! G - OS0_1();
' D! j) A( r! }' h# f - break; }+ P/ P% Q& a" M0 l7 y
, `4 m1 o+ y: g' o: H- case AD_OS_X64:3 D6 Y2 u& l7 }7 S7 M5 ~! A) G4 E) H. V
- OS2_1();
$ U% S* M! N" F( k - OS1_1();
8 u3 V \; U# w3 z, X - OS0_0();( Z% e- q+ J$ p$ M* D# X# u2 Q
- break;
6 u: N. }. v& R9 n - 6 f* {" ^* E8 @9 D* g
- case AD_OS_NO:
, Y, g3 @( {7 {% ^ - default:
' D/ f- [3 E* L7 u2 `0 o - g_tAD7606.ucOS = AD_OS_NO;/ m# }( m$ \$ ^- I9 w! J% z
- OS2_0();
$ x. U( H# ?% n5 x! G0 F - OS1_0();
( x3 O9 ?5 }9 o - OS0_0(); X* V4 R9 I( v' X& M- u
- break;
; D% o0 Z; X1 L# T7 ~2 \7 d - }0 j3 e! s6 Z5 c0 o: T
- }
77.7.8 第8步,AD7606量程设置. ]$ I) g1 f+ ?# z# x8 J/ C
AD7606支持两种量程,±5V和±10V,实现代码如下:
2 ^, b1 U6 m0 J
2 s- q) s; \% A3 U9 u- /** Y. X! L2 K2 [
- *********************************************************************************************************% y3 n. v, {& ]3 W$ L1 P
- * 函 数 名: AD7606_SetInputRange$ B0 }- G4 `4 G
- * 功能说明: 配置AD7606模拟信号输入量程。
1 @3 _( D4 }3 M( x# ^ - * 形 参: _ucRange : 0 表示正负5V 1表示正负10V; J( I/ L; O; F+ I5 Q# c" P
- * 返 回 值: 无
; W% H# x5 V$ \* Y% G1 ^/ g3 o - *********************************************************************************************************
$ M- m6 Y! U7 W; P9 N2 ~# L* c" N4 a - */4 K0 f& L0 A) X0 B" a+ J$ O
- void AD7606_SetInputRange(uint8_t _ucRange)- D/ W0 v2 T( \1 C$ b
- {7 g$ n, N6 _! {' M; H8 M
- if (_ucRange == 0)) c3 y: p) l% C
- {
0 r- b% X4 y/ j- V* A- j - g_tAD7606.ucRange = 0;9 ~: ]! c0 Y. r, h- t, T( B- [
- RANGE_0(); /* 设置为正负5V */$ |8 j) f: Z) _7 E8 ~
- }# G* p+ @( b K9 c. k( ?6 E+ w
- else8 F" A3 v# }1 D6 B9 [
- {' l+ P' W, A" R E6 ?
- g_tAD7606.ucRange = 1;
* F/ c: k& u4 e9 y9 o; q1 u3 [ - RANGE_1(); /* 设置为正负10V */0 b$ C2 G" ~( A7 G# j9 B7 |: ]
- }4 Y3 P3 g* g* x* e9 z
- }
77.7.9 第9步,DMA突发传输的1KB边界处理
# u7 f% C6 v. Y" A' {2 _2 k# a针对突发传输,参考手册DMA章节有如下说明:) N- M+ J/ x+ w1 R& x
: p- ~3 z# e/ A8 C
6 i3 L; ~& w7 @# g' W% F: c6 y5 ^& ?; i" a7 n2 w
注意正确理解这段话的含义,意思是说突发传输期间,不可以跨越1KB对齐的地址,比如0x2000 0400、0x2000 0800、0x2000 0C00等地址。我们程序里面是设置的每次突发传输16个字节数据,这16个连续数据不能有跨越这些地址的情况。这对这个问题,有个比较巧妙的解决办法,直接设置DMA缓冲区16字节对齐即可,这样每次突发都不会有跨越这些地址的情况:' a7 `# v$ L5 L7 q* e: K
* {' N8 ^$ P% c" M$ N+ R8 o) ~, L
- /* 8路同步采集,每次采集16字节数据,防止DMA突发方式1KB边界问题,即每次采集不要有跨边界的情况 */, ?# l, Y1 j. M; \& {, P
- #define AD7606_BUFSIZE 16/ C% k+ b* j$ r5 R0 _+ P
- __align(16) int16_t g_sAd7606Buf[AD7606_BUFSIZE]; /* DMA双缓冲使用 */
* |) x0 @) l8 g9 v+ p# _7 _77.8 AD7606板级支持包(bsp_fmcdma_ad7606.c)
: Y2 x+ _5 i0 x- W" f. ]! aAD7606驱动文件bsp_fmcdma_ad7606.c主要实现了如下几个API供用户调用:
& l1 X+ H+ S; N
4 s, r7 U: C, `- ]2 j y# W5 z bsp_InitAD76061 k" A. e. Z! A! n
AD7606_SetOS7 n' { k+ J/ S& ]
AD7606_SetInputRange
2 p1 L2 e1 A! h- z: W$ l% A6 L AD7606_Reset2 T* j7 I# i$ x4 z
AD7606_StartConvst
5 [9 b' I& E* {8 j/ |* v- v1 w AD7606_ReadNowAdc+ Y7 w- [5 e# x% n+ O1 C
AD7606_EnterAutoMode
2 I5 ~2 q6 C; q7 h G" J AD7606_StartRecord* C6 v2 l! U% J7 m
AD7606_StopRecord0 s4 x( r9 I" F, c( p
AD7606_FifoNewData8 M/ z4 P$ K, I
AD7606_ReadFifo% l! ^/ G$ n4 z& |, Y2 |$ }; A+ O
AD7606_FifoFull% f+ l- q% ?# t; w! X
77.8.1 函数bsp_InitAD76060 t5 V) C) j: Y" w3 z/ p9 R
函数原型:# e+ N9 @( c; U/ F4 Q$ t) y% v" }5 h
4 {2 E; z! B' k
void bsp_InitAD7606(void)7 g' j) q$ k$ s! }- ^; g9 n9 L
- o. K/ N; e+ E' ?6 g, b. }7 |6 s函数描述:
. n% t/ s0 J# O6 F
( O2 b( Y2 y7 W+ C主要用于AD7606的初始化。! _/ V9 _: A, {4 g
- E5 q6 U$ T, x t& G' z
77.8.2 函数AD7606_SetOS
6 W& g0 w4 K4 Z- N函数原型:! w. W. q" R3 L/ Z
8 w: k2 k* O. Y: cvoid AD7606_SetOS(uint8_t _ucOS)
! s" p5 n5 A7 B, ]7 s
1 i, S! I* f) Z) Q i函数描述:1 z5 ^( f0 D; t
% U% p1 `; W! V6 [3 S$ V此函数用于配置AD7606数字滤波器,也就设置过采样倍率。通过设置 AD7606_OS0、OS1、OS2口线的电平组合状态决定过采样倍率。启动AD转换之后,AD7606内部自动实现剩余样本的采集,然后求平均值输出。$ c3 i; g. [) x0 l9 t) K' ^( V
2 R: B& o) C' _0 E2 ^过采样倍率越高,转换时间越长。6 ~" c4 w8 v' ?
U+ ?. s; y+ t {: s( I7 Y
无过采样时,AD转换时间 = 3.45us - 4.15us。
6 t- H) K) z, O( E9 ]" B* O: l# d% h7 U/ ?/ }
2倍过采样时 = 7.87us - 9.1us。
5 K' w7 M% ^; ?
% K6 P9 Z3 G" k( g z# j$ k" t: ~1 o4倍过采样时 = 16.05us - 18.8us。4 `3 u- A3 R1 z4 l0 R9 q f, u: s
6 f% |2 S$ V' N# D8倍过采样时 = 33us - 39us。
8 ], E' ]6 a2 {' H$ i6 v7 B# W9 m
& F( d# e2 e f- f16倍过采样时 = 66us - 78us。
$ O* o7 x' Z; e9 j; a& h( V+ W
: j! j% D8 ~ F32倍过采样时 = 133us - 158us。
- K) L1 w K6 u; R: Q' T
: [: U: g) y/ m% n4 P/ j% y64倍过采样时 = 257us - 315us。- @1 U0 Q7 X( M
6 T. l- Z/ Z5 f) R4 {3 K
函数参数:
# T6 K7 [9 T l/ v7 q: x( C( o) b; ^) `) j
第1个参数为范围0 – 6,分别对应无过采样,2倍过采样,4倍过采样,8倍过采样,16倍过采样,32倍过采样和64倍过采样。+ E e! w" b8 C' h3 t
77.8.3 函数AD7606_SetInputRange
* S$ o0 ^: u: d& t! t函数原型:; S$ U9 A1 G4 G; N( r
( H1 t5 X! b3 a% R; W9 ? F% n( mvoid AD7606_SetInputRange(uint8_t _ucRange)
) M% n& [. h/ f+ D; B1 k& l7 c: G# Z, w. m/ `+ H; o1 C4 ~/ i
函数描述:
8 u# r/ B' `5 C0 i4 O
: |5 Z6 {$ I' h8 M配置AD7606模拟信号输入量程。
8 Z- @, p/ K8 N; u! m1 M, u$ V* n6 n
函数参数:! v6 n7 e" o2 x8 _
' O* r! E$ W- W 第1个参数为0 表示正负5V ,1表示正负10V。
I& I* t- W/ d4 ]77.8.4 函数AD7606_Reset
5 Q6 W7 {' o) }" {函数原型:
8 y+ v! r( Q! h& M5 `: r
! V. b5 n" x; b H, c3 G( M- r- C2 k$ mvoid AD7606_Reset(void)3 W, a& }; \+ c/ O7 _
0 X: z% w; H( J+ }7 m6 s
函数描述: I8 P+ h( A# @3 \: d
: v9 z. P( q# I5 r" |
此函数用于硬件复位AD7606,复位之后恢复到正常工作状态。: U) {4 m( U1 E p, [
1 U* l8 \ V- p. d77.8.5 函数AD7606_StartRecord
) o3 ]1 a* r( r+ ^8 x$ D函数原型:( ~! S0 ]8 n* D5 M7 _
, A% f7 v1 ~0 g. d. O5 D. ^void AD7606_StartRecord(uint32_t _ulFreq)
8 x7 n3 d( Q4 Z! l- r1 K, e
' I. L- G9 h$ y6 a* {函数描述:- r3 V+ X" O5 K* }
N, n" M" z: [" I7 K; e% T用于启动采集。
. K! w3 Y7 p9 Z0 _0 {7 G. U; o* L$ z% Q E3 u8 F3 D
函数参数:: V8 M! Q" d8 H% `! d( W. |, {8 I
8 ^( H- @7 R* u 第1个参数是采样频率,范围1-200KHz,单位Hz。, R6 h/ \$ ?0 a/ d: a5 I3 K
77.8.6 函数AD7606_StopRecord
; e( h ], v& n) x函数原型:
4 Q1 r( S/ E) G0 P0 J; {+ ]8 C
/ n9 ?7 i' S* I" avoid AD7606_StopRecord(void)
; T9 m9 j( f: k& p# Q- q: A
0 @( o% w6 {, z7 h函数描述:) P, T, t/ S2 N/ [9 l0 N; n
" I5 K+ E q& z" v* {! c/ t6 e" L
此函数用于停止采集定时器。函数AD7606_StartRecord和AD7606_StopRecord是配套的。5 t' L* Z$ V# ~+ P* v5 F
8 U3 p" t8 B* y+ U
77.9 J-Scope实时展示AD7606采集数据说明0 l3 k% R4 W% F7 o5 _0 H
J-Scope专题教程(实时展示要用J-Scope的RTT模式)0 a. i5 d; d- F0 X# ]9 [
看完专题教程,基本就会操作了,这里有三点注意事项需要大家提前有个了解。另外,推荐使用MDK版工程做测试J-Scope,IAR版容易测试不正常。# l5 \# j# c$ o3 A
/ `- @6 I8 }* I5 [2 B3 f77.9.1 J-Scope闪退问题解决办法9 ]' z" O" h3 \ o0 j
如下界面,不要点击选择按钮,闪退就是因为点击了这个选择按钮。
$ A/ ]8 {7 U. ` L v0 r! e r8 v
8 m5 v \9 ^4 V# D: h2 Z0 q9 p; a4 v" u9 h' l
i; P" q. b5 C& ^ L( u' e) l7 t; ^9 W9 _. g" a: [3 F
直接手动填写型号即可,比如STM32H743XI,STM32F429BI,STM32F407IG,STM32F103ZE等。: z) p& b; K: [% S u: v
4 w8 x" c6 n" b1 C+ R2 y+ N z( L6 R$ V
1 ]* \# n+ K9 ^: O
b% b+ E( `! h# [; P6 }77.9.2 J-Scope多通道传输实现! x7 w2 B& I0 X5 F5 g* n
J-Scope的多通道传输配置好函数SEGGER_RTT_ConfigUpBuffer即可,主要是通过第2个参数实现的。& a3 l+ u: [: j8 z6 Z" {5 n
' V; o# q% ]* s9 Z# _- y. M* |7 g
- /*9 e. Q4 D7 a- E' @
- 配置通道1,上行配置% l$ H: L4 n6 B
- 默认情况下,J-Scope仅显示1个通道。
* T3 r& t: U/ Q% Q - 上传1个通道的波形,配置第2个参数为JScope_i2
; Z+ W& r4 e" a" P+ N& d7 k - 上传2个通道的波形,配置第2个参数为JScope_i2i2
: L+ t3 z; Y4 U3 ~% G. X, M - 上传3个通道的波形,配置第2个参数为JScope_i2i2i2
# C7 S# K7 T0 o - 上传4个通道的波形,配置第2个参数为JScope_i2i2i2i2
% i" a% B3 Z' z7 G8 v - 上传5个通道的波形,配置第2个参数为JScope_i2i2i2i2i22 y" x0 A7 Y7 M
- 上传6个通道的波形,配置第2个参数为JScope_i2i2i2i2i2i20 U2 I) N5 y- N* N$ f, N
- 上传7个通道的波形,配置第2个参数为JScope_i2i2i2i2i2i2i2
$ D/ X* {4 p! e - 上传8个通道的波形,配置第2个参数为JScope_i2i2i2i2i2i2i2i2
8 b) g8 N( U- D+ d* A1 g+ F - */ g0 Z/ w) F; a7 q0 c6 \7 N: ~
- SEGGER_RTT_ConfigUpBuffer(1, "JScope_i2", buf, 20480, SEGGER_RTT_MODE_NO_BLOCK_SKIP);
使用函数SEGGER_RTT_Write上传数据时,要跟配置的通道数匹配,比如配置的三个通道,就需要调用三次函数:
1 P* M8 f \! j2 q' k! K
N+ u( ~9 q2 w- SEGGER_RTT_Write(1, &(g_tAD7606.sNowAdc[0]), 2);! |! o2 n% Z9 H' o( u
- SEGGER_RTT_Write(1, &(g_tAD7606.sNowAdc[1]), 2);
# j# r* E U8 k- y+ \. r3 y - SEGGER_RTT_Write(1, &(g_tAD7606.sNowAdc[2]), 2);
多路效果:
0 [# k. l' ~( G* N6 Z, c$ g3 o
2 ]' C! M5 D: n4 ?8 V5 w( ?( G6 }; h+ m0 e0 a2 |( ^
, x2 z& B. l) a: ]! V
77.9.3 J-Scope带宽问题
7 r1 j. u5 W( R% @& l8 Y: o普通的JLINK时钟速度8 - 12MHz时, J-Scope的速度基本可以达到500KB/S(注意,单位是字节)AD7606的最高采样率是200Ksps,16bit,那么一路采集就有400KB/S的速速,所以要根据设置的采样率设置要显示的J-Scope通道数,如果超出了最高通信速度,波形显示会混乱。/ F! v5 X/ A4 a' @: |: V
: f9 e5 I, h0 `3 Z 200Ksps时,实时显示1路% D1 u4 N, J, D+ ^$ q( d! X$ I
0 U2 A$ t2 o. O% B) y+ D$ X( e 100Ksps时,实时显示2路+ h1 O2 Q$ e# ?) a2 w0 `$ c
& y8 a V. h& y4 Q* l$ o+ N `
50Ksps时, 实时显示4路
# x; |7 I; B" ]7 T
1 [- A# {; |+ x- _" n& F# R/ g* [ 25Ksps时, 实时显示8路
1 ]5 t9 E6 ]3 u% }/ r. l% N6 [2 b% U p) P
实际速度以底栏的展示为准,如果与设置的速度差异较大,说明传输异常了。
, j% p% u! Y$ ~3 s l
+ k+ E* l# _0 g; R4 O8 u
* P2 A/ I" J: T- R3 Y
, O2 C: V3 x, N3 X77.10 AD7606驱动移植和使用
* ~! l0 P F ~( f( ?- J3 x3 c& IAD7606移植步骤如下:
" D8 R" p& Y% K' p. m8 @
( f( q. R) Z5 _& e" J' b 第1步:复制bsp_fmcdma_ad7606.c和bsp_fmcdma_ad7606.h到自己的工程目录,并添加到工程里面。
% p/ N9 u) \) F: W& B 第2步:根据使用的CONVST引脚,FMC DMA,过采样引脚,量程控制引脚,复位引脚,修改bsp_fmcdma_ad7606.c开头的宏定义。
: k# {* t: Q6 x) y6 D1 |这里要特别注意过采样引脚,量程控制引脚和复位引脚是采用的扩展IO,需要大家根据自己的情况修改。* |: W6 o8 ?. M C5 _) U; V1 U% w4 l: O9 N
- h4 t& A6 p9 ?( C$ B- /* CONVST 启动ADC转换的GPIO = PC6 */( s+ t! F: v3 z% ?6 |8 Q k! _( f) X
- #define CONVST_RCC_GPIO_CLK_ENABLE __HAL_RCC_GPIOC_CLK_ENABLE
% {* a- {* o% i - #define CONVST_TIM8_CLK_ENABLE __HAL_RCC_TIM8_CLK_ENABLE
/ q( z( t( ^& Q0 K/ o: q9 m - #define CONVST_RCC_GPIO_CLK_DISBALE __HAL_RCC_GPIOC_CLK_DISABLE
) P" I, G$ D0 | p0 c4 y - #define CONVST_TIM8_CLK_DISABLE __HAL_RCC_TIM8_CLK_DISABLE
# J$ x# @9 V' K1 ^! o& c; v - #define CONVST_GPIO GPIOC
5 g. w, U) c) D3 _ - #define CONVST_PIN GPIO_PIN_6+ A8 @% S0 A7 ^& O' w- T( W, I2 P
- #define CONVST_AF GPIO_AF3_TIM83 Z& A. F/ ]0 [' S& S% W
- #define CONVST_TIMX TIM87 a) r. K) \) Q& r5 z
- #define CONVST_TIMCH TIM_CHANNEL_1: L' Q7 U, M) X2 v- s8 `
- 6 H) H) ~- \1 |* x* d
- /* FMC DMA */
# g; b4 v& b9 l; G - #define TIMx_UP_DMA_STREAM_CLK_ENABLE __HAL_RCC_DMA2_CLK_ENABLE
$ x e( [# D& @% X) @; c- S - #define TIMx_UP_DMA_STREAM_CLK_DISABLE __HAL_RCC_DMA2_CLK_DISABLE
3 t/ k ^6 R% \- _1 Y - #define TIMx_UP_DMA_STREAM DMA2_Stream1
" I: b" y7 g% o' t( a$ F - #define TIMx_UP_DMA_CHANNEL DMA_CHANNEL_7
2 F# ?7 {7 }+ S - #define TIMx_UP_DMA_IRQn DMA2_Stream1_IRQn
& u, x4 e* S4 Q. @ T - #define TIMx_UP_DMA_IRQHandler DMA2_Stream1_IRQHandler- N* a9 a% s2 P# x; @ |; E
4 p0 X& z- a! _* ]$ z3 m- /* BUSY 转换完毕信号 = PE5 */' N; j% |/ n1 p& P1 M5 i
- #define BUSY_RCC_GPIO_CLK_ENABLE __HAL_RCC_GPIOE_CLK_ENABLE- ^; h e5 Z0 _ W7 c# K
- #define BUSY_GPIO GPIOE
' [2 ^9 `. J) v0 p- |) r& S - #define BUSY_PIN GPIO_PIN_5+ h. Z5 D* r$ [, P+ A' ?
- #define BUSY_IRQn EXTI9_5_IRQn
) b" J8 b7 h T7 [5 F - #define BUSY_IRQHandler EXTI9_5_IRQHandler* G! c% `* { W: }
: T% K `2 v4 n- /* 设置过采样的IO, 在扩展的74HC574上 */5 D/ n; V6 F- o) p
- #define OS0_1() HC574_SetPin(AD7606_OS0, 1)
{0 {! N: o' g" @4 X1 I - #define OS0_0() HC574_SetPin(AD7606_OS0, 0)
' m) ]6 g2 q* m: c. [/ ? - #define OS1_1() HC574_SetPin(AD7606_OS1, 1)% G. a0 l* K% I6 J0 m- f2 j' H
- #define OS1_0() HC574_SetPin(AD7606_OS1, 0)9 p% [: l- K- t5 v; }) {3 ~5 U5 d( J/ g
- #define OS2_1() HC574_SetPin(AD7606_OS2, 1) \& {) e, l! z+ \
- #define OS2_0() HC574_SetPin(AD7606_OS2, 0)
: L: @; O* V1 D" T: h, B! v9 }
2 W" Z, S) p! U) v5 M- /* 启动AD转换的GPIO : PC6 */
I$ P% G Q* ^ T* K0 l7 c+ N, K% k - #define CONVST_1() CONVST_GPIO->BSRR = CONVST_PIN; N- @" V8 u% N/ K5 O; R. j
- #define CONVST_0() CONVST_GPIO->BSRR = ((uint32_t)CONVST_PIN << 16U)3 o5 T8 ]$ ?5 ^: Z5 f% B% o: m( O
- 4 P" |- j: t8 r& p7 X p ^+ M! v
- /* 设置输入量程的GPIO, 在扩展的74HC574上 */; x1 x- Y: R8 E
- #define RANGE_1() HC574_SetPin(AD7606_RANGE, 1): `9 p$ {) m' }0 i* h% ^* L7 b$ \
- #define RANGE_0() HC574_SetPin(AD7606_RANGE, 0)
\; e1 L2 \. Z6 v" f( p" H - ' Y r7 w! M( z3 U: m
- /* AD7606复位口线, 在扩展的74HC574上 */% A; D9 @6 h' Y2 U
- #define RESET_1() HC574_SetPin(AD7606_RESET, 1)
& v9 C2 R# M8 h5 \1 @, X4 Z u; K - #define RESET_0() HC574_SetPin(AD7606_RESET, 0)
第3步:根据具体用到的FMC引脚,修改函数AD7606_CtrlLinesConfig里面做的IO配置
' v/ H/ D+ D( }1 _+ Z6 v$ s8 n 第4步:根据需要设置DMA缓冲大小:
3 M" ~$ B" n& s# K v- /* 8路同步采集,每次采集16字节数据,防止DMA突发方式1KB边界问题,即每次采集不要有跨边界的情况 */
8 H! W6 c+ J: {! L% o' ` - #define AD7606_BUFSIZE 16' T; J" ^1 f/ J% ?* |+ L* U
- __align(16) int16_t g_sAd7606Buf[AD7606_BUFSIZE]; /* DMA双缓冲使用 */
第5步:根据使用的FMC BANK,修改函数AD7606_FSMCConfig里面的BANK配置,这点非常容易疏忽。
5 o, E" o$ H' W5 H 第6步:注意MPU配置,详情见本章78.7.4小节。
- \' l5 o. `" B) u 第7步:初始化AD7606。
; A' \- }: q( t1 M% |- P- bsp_InitAD7606(); /* 配置AD7606所用的GPIO */
第8步:AD7606驱动主要用到HAL库的FMC驱动文件,简单省事些可以添加所有HAL库C源文件进来。: V& Q X' b" o O$ ~( e9 E0 ?
第9步:应用方法看本章节配套例子即可。" W4 Q; P2 Q2 N& s& v
77.11 实验例程设计框架
# i. Z2 `8 {6 N$ {' U通过程序设计框架,让大家先对配套例程有一个全面的认识,然后再理解细节,本次实验例程的设计框架如下:' V3 M8 }8 `) I: ~6 J1 O
' W r0 _( w5 h, H/ `3 D' z d& a9 k C* L
1 F+ {. W0 B0 s6 T 第1阶段,上电启动阶段: e5 F7 j4 R" z1 A: Y
7 N7 Q; e0 I$ N
这部分在第14章进行了详细说明。- `8 a3 k" N6 L- Q1 M$ p# {( \
第2阶段,进入main函数:
2 r- `3 F8 y6 W' z" P* r' i! x; A$ t( |' |* V% ^9 G% I
第1部分,硬件初始化,主要是MPU,Cache,HAL库,系统时钟,滴答定时器和LED。
& _; O7 C. w2 _+ q2 ?" \1 Q4 s. L 第2部分,应用程序设计部分,测试AD7606。
3 A1 \5 P. y% z& L0 U77.12 实验例程说明(MDK)
4 @. {8 q& P& u# `3 e5 t# I) U配套例子:
# C5 n! W& a0 l* P, o
3 l! z! F/ H1 v& {4 N. FV7-057_ AD7606的FMC DMA双缓冲总线驱动方式实现(8通道同步采样, 16bit, 正负10V)
' y9 ?6 `; B2 ]. m
/ I4 n) T' t* l8 }' f4 E实验目的:
2 r" h" \, R- j( p+ t7 D, Y/ p* h+ C; z( E
学习AD7606的FMC DMA双缓冲驱动方式实现。
( N5 {! S o& z' R/ W1 J重要提示:
3 H6 s1 f, u4 n V# @6 j. I7 f5 ^) }3 R; [# ]
板子上电后,默认是100Ksps的2倍过采样。
4 f( Q+ D: Q0 Y! R- v0 p* n+ ~如果使用的JLINK速度不够快,导致J-Scope无法最高速度实时上传,可以使用摇杆上下键设置过采样来降低上传速度。- C% I R9 t; B; l- q: F# H" j
默认情况下,程序仅上传了AD7606通道1采集的数据。
. [2 r9 k+ _! d串口数据展示推荐使用SecureCRT,因为数据展示做了特别处理,方便采集数据在串口软件同一个位置不断刷新。% Z* l, B+ Y: H) u8 a2 ?5 M! P
实验内容:5 a$ Q4 n+ p3 U
' V5 {$ D3 T. m( x# O, C. M1、AD7606的FMC驱动做了两种采集方式: ]+ l3 f" X' f# F0 V- X# W& [" J
. V& a1 Y4 y* Z6 R6 H+ X' S(1)软件定时获取方式,适合低速查询获取。( U7 @6 O3 S p6 |
/ d1 @! l. V* K5 K# o$ d3 k. j
(2)FIFO工作模式,适合8路实时采集,支持最高采样率200Ksps。: I+ l5 ^" T2 g3 ?5 g5 W* O) U; W
% I8 w2 ~( _, A5 i) \" x2、将模拟输入接地时,采样值是0左右。
1 P. J9 R! Z# o8 C. O% S- H; w( [7 n0 `9 A5 R- i# A
3、模拟输入端悬空时,采样值在某个范围浮动(这是正常的,这是AD7606内部输入电阻导致的浮动电压)。) e5 G' y' c9 [. M! U; F" B( r( q
( b2 }3 f2 }3 E4 b+ ]/ S7 N4、出厂的AD7606模块缺省是8080 并行接口。如果用SPI接口模式,需要修改 R1 R2电阻配置。4 c2 i3 X9 k% J% ^ \ m
( {3 b9 p7 F2 r$ _- L
5、配置CVA CVB 引脚为PWM输出模式,周期设置为需要的采样频率,之后MCU将产生周期非常稳定的AD转换信号。) u$ }$ U `$ y
% I/ g/ R; z Z) b7 @
实验操作:
$ ?3 |' E; J, o& |" F; j1 `! G
, A4 H0 c$ z% g启动一个自动重装软件定时器,每100ms翻转一次LED2。( `/ I, u1 N6 U& }% P' F
K1键 : 切换量程(5V或10V)。4 C! j# t6 e" p' d/ O b+ _
K2键 : 进入FIFO工作模式。
\1 p8 }. L r* I5 z3 Q6 [$ p7 lK3键 : 进入软件定时采集模式。4 \1 }& R0 J: r7 M
摇杆上下键 : 调节过采样参数。
/ i6 W1 _' V+ |. u& o7 o5 _上电后串口打印的信息:
& p* T) `; S/ Q5 ]# p* }0 A) ]3 P: b) |# ]9 u; Q+ L
波特率 115200,数据位 8,奇偶校验位无,停止位 1。" i; Y! A) }6 B+ W
$ l8 \6 b* v& S0 p) g$ W# k, c& D; y, }& f+ y0 m! Z
. w* d- n' d& s2 N
( P1 e5 ?/ S+ ?, y k0 I+ t7 J: d
% v! L3 C4 { ZJ-Scope波形效果:7 d' e5 p9 k/ E* E
: A" j. A+ l" _& l* T2 j
% d* o/ B a- k6 W0 `2 q8 ` z+ z# W$ _% Z! Q9 d$ b5 \
[) K+ R! B7 a6 u$ v
模块插入位置:
# y! x$ X. q" Q- f- R
1 o) S% M/ |, u
5 h* g1 @* i: p+ V) {
7 G/ g3 Z8 z- M/ L) C; [$ j2 W e
* `; j2 G5 O0 W$ T程序设计:
0 W9 ^/ L, U/ p' |+ Q: [1 S- j5 V" i+ n; f% d, Q
系统栈大小分配:
8 T' g" X& Y2 q* g
7 o( s$ _8 ?! H, O7 @
) _* s( L# Y/ R( l; f/ r3 a k @9 k# R
/ i5 `2 ^0 L/ T# B
4 g, V. P6 v0 F1 o l8 f. }6 V* [. l0 z
RAM空间用的DTCM:
5 |) d+ ?# n& J$ ~7 }% p! ]( _7 X0 S4 N8 V. W' V3 Y
8 l+ i; q- ?9 {1 L$ n" Q
2 Q9 @4 p3 _8 S/ A. T5 U- L. i3 J$ [
# D, D9 O, S- d- m( P3 ~9 F' v" o
9 r" E# Z' ] q7 l- O. m
硬件外设初始化% z9 U# r* a, `& w' B
7 Q+ T% ~. J5 I& y1 H4 }2 w' V硬件外设的初始化是在 bsp.c 文件实现:
1 f9 v. d" E; f; { s Q, p0 z
4 b5 ^4 ?2 i% Y* X6 M) a- /*. k1 T) B% L A4 W
- *********************************************************************************************************+ S }/ f0 O0 l' l% O( j1 W
- * 函 数 名: bsp_Init5 @' r) H, ]# l& u' }7 P
- * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次- X1 a$ v& f% ]( n
- * 形 参:无
" P2 {. Q2 u7 ~1 y4 r - * 返 回 值: 无
# X, D3 }1 P/ ~5 q - *********************************************************************************************************
: c3 I+ \7 E' b. F6 |/ C& h; p$ R - */" F9 `+ D/ w3 k% i/ Q& @
- void bsp_Init(void)
0 G; h7 q% ~3 U: O5 [, ~ - {: Z7 J! g1 \; p( t& G q$ i
- /* 配置MPU */
6 W6 w& ^- m2 t5 J - MPU_Config();
6 O; Q$ ~' a% b# z' P- P( N - ( a4 p: }- a4 E5 `) R5 A6 ^" |
- /* 使能L1 Cache */
j% F) w3 @+ m4 `$ q: f$ a' v' M - CPU_CACHE_Enable();* Y. {6 q& ~0 i& X3 c$ J4 c
- $ Q* B% m/ x; x1 t. k$ F0 C
- /* # t8 v* `& o1 T( e% |2 t& r
- STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
% d: m! w1 F* s" c. e( D3 B7 @ - - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。: f4 q: a3 Z/ f) r$ ~7 u! o& Y
- - 设置NVIV优先级分组为4。6 U7 K2 T# n2 @# j! S) I
- */
7 P6 @$ Q% B- K1 \; M' U - HAL_Init();
: x% G/ e' L/ o' }! p' T - 1 D1 O' L* ?& }* J, B
- /* 9 Q4 c# Y$ D4 w7 g) x
- 配置系统时钟到400MHz) O6 g0 g1 y( ~: B3 v+ y0 q; I
- - 切换使用HSE。
( b) w& v: M7 @ - - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
, f: Q. t R% Q4 b - */4 s; K$ C. U) O* a
- SystemClock_Config();
! L3 G* U8 g5 P, M4 q
9 `+ u* Y: s/ [6 o- /*
* S% P0 E8 Q* {3 J$ _ - Event Recorder:, Z/ D/ H# i% o7 r! j+ m3 k- R- b
- - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。3 ~7 Q( j1 y7 M$ [. {
- - 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
- L0 U! z$ x) {% U( ?2 X8 N9 M" ] - */
' P6 J! H) E0 b1 { v - #if Enable_EventRecorder == 1
8 g1 M4 y+ b. x* i" ~0 i - /* 初始化EventRecorder并开启 */
! p+ t$ w, J$ X, r5 j% H' r* b2 o - EventRecorderInitialize(EventRecordAll, 1U);7 b! P9 w- R2 f8 _9 b! T$ U
- EventRecorderStart();/ s) Y1 Z8 v- E9 M3 J6 h
- #endif
v6 N! X4 C- V0 l7 e ]4 V6 Z* T - 8 j! T8 _5 y% V. ?" k; |
- bsp_InitDWT(); /* 初始化DWT时钟周期计数器 */ & y/ {" ~$ S2 p$ E: L
- bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
8 I) t' S4 S1 | - bsp_InitTimer(); /* 初始化滴答定时器 */( [5 ] L' G8 O; p S* i8 O
- bsp_InitLPUart(); /* 初始化串口 */
0 U: }9 T4 R" A3 k - bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */ * d/ f+ ^+ k5 \6 c
- bsp_InitLed(); /* 初始化LED */ * v3 R8 |$ X+ o7 l. ^; v
- bsp_InitExtSDRAM(); /* 初始化SDRAM */
4 Y* w0 }; m; h" k" f8 S( P/ | - 9 A* W9 z- T& E. X
- /* 针对不同的应用程序,添加需要的底层驱动模块初始化函数 */ / L2 i: v0 N, t4 w, w
- bsp_InitAD7606(); /* 配置AD7606所用的GPIO */
" W9 B* N0 O+ O* w( d* h - }
: c: i+ n6 k. `6 z% l4 r/ _ E
; E* a) M9 Q8 u2 @! O0 \; K0 V2 u6 O MPU配置和Cache配置:7 q `2 ]4 O9 l* j
: S0 R. i6 w9 M/ n- Q
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
1 G$ a# t$ ~ [: r# k1 j7 r1 O% L: i; l* d* d
- /** j) `+ B. p7 j5 _) m
- *********************************************************************************************************
) P2 B7 `9 \. p# k& ~; { - * 函 数 名: MPU_Config
; Q- [9 }- ~. V8 j - * 功能说明: 配置MPU; t9 b9 f8 L+ N9 U9 w8 P) g: `
- * 形 参: 无# \! c" X0 `# @+ ~2 A3 S
- * 返 回 值: 无
$ d* F. ?+ n. J* V4 { - *********************************************************************************************************& q0 m+ J8 u6 j- E' |; K
- */6 b9 M) z& @# L: U. v" `5 S
- static void MPU_Config( void )5 s9 H; X2 o6 n: e
- {' b1 Y: p4 L$ K# q9 u
- MPU_Region_InitTypeDef MPU_InitStruct;0 y0 u: W' ~5 [
- - `2 z* h) B, q- t
- /* 禁止 MPU */( x2 M3 S6 F2 J) T
- HAL_MPU_Disable();
5 c& T0 v$ r" q- X! V' W - 9 o# W9 L% Z( t9 B/ ]! F2 m' i5 Q. j
- /* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
- F) q6 H+ F( z) i# e - MPU_InitStruct.Enable = MPU_REGION_ENABLE;6 n1 q4 ^, |! Q0 c
- MPU_InitStruct.BaseAddress = 0x24000000;3 L( G! E8 O/ }
- MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;. e1 L9 ?3 }& i* Y9 t7 q
- MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
3 L+ d+ l* F3 E/ \ - MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
# [+ _! p8 d9 [2 O2 l( Q - MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;) _6 J' R# b* B, Z
- MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;; e0 g2 [, m' M, T! |
- MPU_InitStruct.Number = MPU_REGION_NUMBER0;
2 j# D& I& v7 N) Y" r - MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
- j( A. L+ L$ S8 n: d4 L* x" L - MPU_InitStruct.SubRegionDisable = 0x00;
+ O% B- j" [6 k* R7 H l$ _! q# w - MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
2 L4 g) v, E/ u7 W
: M" W' |0 D* [. C0 t+ R' ~- HAL_MPU_ConfigRegion(&MPU_InitStruct);
) C# @7 B, q/ R0 Y
4 X) ^; C8 g6 ~* U' [; b; y7 n
7 ~. \+ U; n* s0 o# v- /* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
' G( B# N3 Q8 N9 _# O - MPU_InitStruct.Enable = MPU_REGION_ENABLE; B: ~ N& w0 z- l/ E
- MPU_InitStruct.BaseAddress = 0x60000000;
; r, t/ }9 `: r - MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB; ! _' F4 r u0 Y) h
- MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;0 |/ }. m; B8 X
- MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
. h& H. t" |/ V, @+ o- o+ P - MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE; : R, x- j' `6 E# S
- MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
) ]4 X0 ?; X( b' W' w5 k5 ~ - MPU_InitStruct.Number = MPU_REGION_NUMBER1;! {- o/ K% R1 X% x- l m
- MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;4 _- @2 E. j7 O- I0 G- ~! s7 F
- MPU_InitStruct.SubRegionDisable = 0x00;) t( H/ f, k8 e& y: L9 H; d
- MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
9 A0 l* b( e4 d( s! g% I. ^, m: q
+ v( B B0 E* _& E* C( p- HAL_MPU_ConfigRegion(&MPU_InitStruct);9 _; m2 I& {- R
: Y( r% W7 U+ b7 @, |5 I+ B- /*使能 MPU */
5 A& A( E5 _% y& f2 b - HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
0 ]" c: A& h$ \6 w; k2 M4 M$ B# C9 t - }6 R4 n x8 z* W+ T2 N3 c' }$ c
- . ]4 }# c ~. u* `; i. S1 ]' ^
- /*
) O4 o: ]7 @& _ - *********************************************************************************************************" |$ W( i- @% j1 _+ ]
- * 函 数 名: CPU_CACHE_Enable
/ Z+ }% F3 @4 b) u - * 功能说明: 使能L1 Cache
. O+ d0 {/ f. c! N: \* l - * 形 参: 无
5 v- R' d3 G" ^ - * 返 回 值: 无2 J1 R2 T. `4 Z8 x o/ C) A
- *********************************************************************************************************+ ^, \- }0 i; s1 u6 p& s
- */$ ~5 G6 x" K, V, z) m: a) s
- static void CPU_CACHE_Enable(void)) q+ O6 L. h4 [2 i: r
- {
- n* y" I' B' P5 ? - /* 使能 I-Cache */
: }; s* `% C6 ^3 m( Q B - SCB_EnableICache();
8 }7 M Y. R# s- f$ f
' ~1 l: N j: U- /* 使能 D-Cache */% }7 x n0 W# r7 z
- SCB_EnableDCache();: q5 m- K) H2 m/ J2 b# t5 I6 l
- }- D9 C# \$ g9 `! |3 P/ J
* e! O6 t, A$ c
: B" v% P- f4 n, [$ R- w: m 每10ms调用一次按键处理:
; ~- N+ C. `2 e9 I
6 a: t* U3 T9 H# L7 L. F+ X" j0 e4 C按键处理是在滴答定时器中断里面实现,每10ms执行一次检测。
P* i* N& g9 Z; |. s' V3 I3 U1 A# K R0 D( D+ P0 t
- /*" o: N. @$ Q( A. c
- *********************************************************************************************************
2 a" I* h8 @% k - * 函 数 名: bsp_RunPer10ms' \5 X+ W, j R# S" S' Z
- * 功能说明: 该函数每隔10ms被Systick中断调用1次。详见 bsp_timer.c的定时中断服务程序。一些处理时间要求2 A/ r' F1 ?$ @4 J" \
- * 不严格的任务可以放在此函数。比如:按键扫描、蜂鸣器鸣叫控制等。
$ V z3 L, M) Q4 l5 z: E - * 形 参: 无! B+ M L/ L/ H3 s/ M
- * 返 回 值: 无% U1 M* j; b' w* m% ?, w
- *********************************************************************************************************$ ^* v/ k1 D; e" Q
- */1 W) O6 S6 \ w* s# C% f! L) B, f
- void bsp_RunPer10ms(void)9 ?/ B0 P, C" E. o1 ?$ E4 H% d
- {0 x, _! x0 c+ G& l
- bsp_KeyScan10ms();1 V, y& m# c/ s4 G1 Y
- }9 ]/ V/ K$ F7 I. ]
' P- N( L* f3 _! ^/ f. l. o
v8 e: y; R! |& [6 y9 I 主功能:% t1 ~/ W. P! E, j$ a. D
4 y G6 @% B. I3 [$ T) N C主程序实现如下操作:; _, d& N/ B Y; R2 h: J: G3 b. Z! e
: y& ~/ e( p! a8 {( K* C* R0 ]4 \9 ` 启动一个自动重装软件定时器,每100ms翻转一次LED2。; J: [6 V" A+ l; _: i: Y5 m
K1键 : 切换量程(5V或10V)。% z! Y) B Y8 R, ~) ]0 q
K2键 : 进入FIFO工作模式。3 h6 V, C/ p0 @+ j7 p( p9 t- R
K3键 : 进入软件定时采集模式。7 E: _! f( i. `7 }2 E% Z* j
摇杆上下键 : 调节过采样参数。
" E: |( G0 |+ |# P. r/ O- /*: x! G" j8 U8 V" s2 g
- *********************************************************************************************************
5 |$ U: e1 {" Y; Q - * 函 数 名: main+ C0 O5 K- {) i# E. _& z- x+ Z
- * 功能说明: c程序入口
* F( W6 l1 L# w* }# R$ ~1 ^# v - * 形 参: 无6 V5 @* E' Z4 d3 J2 C5 ^# \
- * 返 回 值: 错误代码(无需处理). P: v: P( l- o7 b/ p$ q# `' @3 |
- *********************************************************************************************************
# c" W- I, I. J% Y- \ d0 p$ z - */
4 m' K! N" K6 A* B/ J - int main(void)
' w: o( @/ h# h& ` - {
1 B( H" r+ u4 R A' `" E+ ?1 ` - bsp_Init(); /* 硬件初始化 */; h& k! H* w( A! \0 } T
- / z# M A5 \+ j; e3 Q2 d
- PrintfLogo(); /* 打印例程名称和版本等信息 */' |1 `. H* v7 U- ]& N# E
- * Z( a) S7 A5 U O7 `
- DemoFmcAD7606(); /* AD7606测试 */: e8 ?+ S# T" _% W0 s8 m' E/ K2 T
- }7 E3 a1 z! a6 H2 q0 f R( _
5 n! N z7 {0 d- /*. ?0 n3 K+ L2 h0 N. |7 M
- *********************************************************************************************************
$ j, _+ L0 t7 N8 f# r# a3 a; T: S - * 函 数 名: DemoFmcAD7606
$ @5 y: b+ W+ O2 ~ - * 功能说明: AD7606测试" c5 ]. U$ G6 m. j/ D
- * 形 参: 无
# \9 D) @, W6 V+ O/ E - * 返 回 值: 无
# G0 O A5 F% C# Z% [/ z - *********************************************************************************************************9 F4 R# c. k/ P' P
- */
7 }6 v `& D V1 @0 Z+ T! T% D1 o - void DemoFmcAD7606(void)0 h! q3 D! j, D$ _/ ^
- {3 H% {- \$ y1 n; ~
- uint8_t ucKeyCode;
0 V7 ?( [2 E+ G1 t" I. R5 Q - uint8_t ucRefresh = 0;7 Y7 D3 h4 G# b: H3 P) O( V8 l
; X: w5 Y2 u; u5 i
6 W1 z3 ^! w2 s1 i& a% d4 M! T5 F; w- sfDispMenu(); /* 打印命令提示 */
, _- x+ \1 Z, B% f6 b& ?& v - 8 S3 {9 i( L( e, e
- ucRefresh = 0; /* 数据在串口刷新的标志 */' P& b# ?* q; ]5 R" h2 D
@0 b0 ~1 [6 r( G) ?7 s: n: F- AD7606_SetOS(AD_OS_NO); /* 无过采样 */; a) F& {. |. I% } W: T4 a
- AD7606_SetInputRange(1); /* 0表示输入量程为正负5V, 1表示正负10V */# x' k( }- W+ ], j" N
- AD7606_StartConvst(); /* 启动1次转换 */
) F7 d+ ]9 P; L, i+ B, G# h - $ O- ^' Q/ r3 N% U6 _/ ~
- /* 上电默认采样率 */
* g; i! u' N* ^9 @ - g_tAD7606.ucOS = 1; /* 2倍过采样 */5 e, `) v$ h, x( [# ~
- AD7606_StartRecord(100000); /* 启动100kHz采样速率 */4 ?* D& d6 o9 n% Q& Q# U' H3 S
- AD7606_SetOS(g_tAD7606.ucOS); /* 设置2倍过采样 */
/ k( ^) e: m+ u' }/ X1 P8 M
- E8 C% ^, J1 O" h- z4 {8 G# q: u, N6 }% W" V
- bsp_StartAutoTimer(0, 500); /* 启动1个500ms的自动重装的定时器 */: N) m" ^, B* d( \2 [
- bsp_StartAutoTimer(3, 200); /* 启动1个200ms的自动重装的定时器 */' R# e S' E/ }' g
0 ~7 |3 E' R0 o' X9 [9 F- /*
# T. P7 [* g7 D; O6 A3 r' e - 配置通道1,上行配置2 y e2 B* h! A6 A" o
- 默认情况下,J-Scope仅显示1个通道。# P3 E& x" k$ g8 g+ k5 ~
- 上传1个通道的波形,配置第2个参数为JScope_i2+ f1 S1 E8 d' P* y$ n# a
- 上传2个通道的波形,配置第2个参数为JScope_i2i28 Q$ P" A* r- \) M5 Z
- 上传3个通道的波形,配置第2个参数为JScope_i2i2i2
) _1 W' ]+ ?0 }/ I0 x* g2 V1 [ - 上传4个通道的波形,配置第2个参数为JScope_i2i2i2i2; i% G2 K" S- N6 O8 F7 k6 M
- 上传5个通道的波形,配置第2个参数为JScope_i2i2i2i2i2
; P6 I. |/ X2 Z) k I - 上传6个通道的波形,配置第2个参数为JScope_i2i2i2i2i2i2$ n, u. Z- Y2 L5 U
- 上传7个通道的波形,配置第2个参数为JScope_i2i2i2i2i2i2i2( S5 N: B' m4 Z; A5 V4 ?. z
- 上传8个通道的波形,配置第2个参数为JScope_i2i2i2i2i2i2i2i2
' y: \. v7 l1 d4 j4 t. z7 x - */ - K z4 C$ Y# y# u+ R
- SEGGER_RTT_ConfigUpBuffer(1, "JScope_i2", buf, 20480, SEGGER_RTT_MODE_NO_BLOCK_SKIP);3 d& y& }! R/ h5 R; n1 X3 C
* l5 D4 F1 e# }! X7 X p$ u( O- K- while(1): g# o; J% c" q) E
- {
+ V! q) {% `. F - bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */
$ ~9 ~8 j4 |, y0 S7 z
& n+ N1 V3 W: g0 }! s5 {+ l+ [& v- /* 判断定时器超时时间 */
: O, W& {3 t8 T! X. b/ o+ r - if (bsp_CheckTimer(3)) 3 G% K; ^. c, V4 `% Y
- {
4 Y. Q0 X/ g# i! [4 z; |0 e - /* 每隔100ms 进来一次 */
7 e+ C7 Q0 E" h) x: W* H - bsp_LedToggle(4);
* t4 W8 Z2 @7 H2 n- Z1 I$ T5 V - }
1 a, _( A; m+ ]5 l0 a* s b - 2 [% k: A @# _3 D* e l
- if (bsp_CheckTimer(0)) {- G6 Z0 x, s2 |
- {4 p& i7 }; K8 |$ ~, @7 W! W, z3 g
- ucRefresh = 1; /* 刷新显示 */) u7 @3 w J u; q4 Y0 c
- }# P) B6 I& i \' P6 v- f2 P T
+ t3 n1 _4 T, f7 l- if (ucRefresh == 1)
4 y% l, R8 ~- ]" }/ c. m# p - {1 b* y7 w/ d; }0 d0 L+ ^0 T0 N
- ucRefresh = 0;+ W! n1 [) {8 g6 J. m
+ a4 b M) T0 ~* G* Z- /* 处理数据 */
" v1 L' W6 i( A! N - AD7606_Mak();
' R) y9 j l X1 j2 b! S - ! @* A3 x6 P3 Z( c! d
- /* 打印ADC采样结果 */* Y; g9 S2 J4 X( z; A$ a/ ^& B
- AD7606_Disp();
$ W5 B/ N7 w4 ~+ O8 s - }$ m6 }) x1 x: K! s$ R5 Z
' a: t2 @6 Q( s# F" |- /* 按键检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。这个函数不会9 F# t+ a$ `8 @7 L4 i) R% N
- 等待按键按下,这样我们可以在while循环内做其他的事情 */% N- F& J7 G, A! X
- ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */. i/ q4 i+ x3 G- r/ V
- if (ucKeyCode != KEY_NONE)* D# g- o* X7 v3 H8 d
- {, J" R# u2 {; _0 ?2 i9 L6 ]
- * R' K" L2 m; @& M! [5 `. Y
- switch (ucKeyCode)
# R# e F4 n5 r% e. k V1 Z - {$ {0 G: }5 n1 o
- case KEY_DOWN_K1: /* K1键按下 切换量程 */
6 m) m0 W! f% [& ~# d - if (g_tAD7606.ucRange == 0). a) Q6 F% `5 Q8 `8 T
- {& E h$ V! T- H: l, j7 g8 B1 B
- AD7606_SetInputRange(1);) v' D4 R! l3 d4 y+ p$ G C
- }
% t: E5 j: Q1 S) f# ` - else2 S6 N5 w' Q$ a9 C
- {
: |. N3 ?# o. ^3 f- z, F4 i- l9 j - AD7606_SetInputRange(0);
O% W, v. z9 b% i7 j - }
, u* C& f7 n4 A$ j8 j$ B - ucRefresh = 1;# `) k! u$ o3 @) y- l1 A$ q3 Y" `) t
- break;
" ]7 g% f: N P2 t$ c2 u - 8 f: Z% p$ P- W) s
- case KEY_DOWN_K2: /* K2键按下 */
7 _ b( W T) o/ _) ? - g_tAD7606.ucOS = 1; /* 2倍过采样 */; \2 n( x/ F0 [
- AD7606_StartRecord(100000); /* 启动100kHz采样速率 */
( p0 Z% h" O6 B; q z' }1 i4 K - AD7606_SetOS(g_tAD7606.ucOS); /* 设置2倍过采样 */" K. @# x; L: z2 ?
- break;
3 X4 f* y5 L% F
# t& |3 k( p; `% n) t- case KEY_DOWN_K3: /* K3键按下 */
2 |2 c. b* a; l" N* t4 T' j2 ? - AD7606_StopRecord(); /* 停止记录 */
' A4 i/ L: U3 d% ?; e8 [ - break;
2 O, d( ?5 Y8 g1 N& u
* R# h0 c) t+ Q1 {. E- case JOY_DOWN_U: /* 摇杆UP键按下 */
8 J' b @4 Q& y" }5 L n - if (g_tAD7606.ucOS < 6)' F9 B, `/ R% @0 u5 x; S
- {% Z! }2 ?7 |6 {
- g_tAD7606.ucOS++;
5 E7 _7 S8 T2 n! U - }
* X1 r6 D3 P& w1 E; _* k
X; C0 M2 y) z9 ]- AD7606_SetOS(g_tAD7606.ucOS);
# T; b7 Y1 T. x; j4 Y0 F! m - 7 A5 e: v& D% B
- AD7606_StartRecord(AD7606_SampleFreq[g_tAD7606.ucOS]);/* 启动当前过采样下最高速度 */
" f, `' E3 ~- b( L! a - . x4 b, j( T6 N; L
- ucRefresh = 1;
' P0 e* I; x, r. m7 ` - break;
8 C" D% Y; b4 _! r* w! m0 f
5 x; h$ Q. k/ R/ r5 g- l; t- case JOY_DOWN_D: /* 摇杆DOWN键按下 */3 I6 |2 O' e- u) N6 u
- if (g_tAD7606.ucOS > 0)4 G+ N7 o v+ `2 x" S& j
- {) j1 |$ Y) a7 K7 d
- g_tAD7606.ucOS--;
& J. y* r* X4 r) N) [( L. G( M - }3 H( r) s5 M7 w/ j8 {$ C! o
- AD7606_SetOS(g_tAD7606.ucOS);
8 ]2 y+ D" T, W3 U3 \# z$ u - ucRefresh = 1;
% U; g4 l+ G% @% b/ j( o3 `
/ u6 ~, r3 [& k: Y# d4 I- |3 K- AD7606_StartRecord(AD7606_SampleFreq[g_tAD7606.ucOS]); /* 启动当前过采样下最高速度 */' P8 a1 c( |* k$ O' H
- break;
. B9 A ?- k9 d; ]4 ] - 7 h' ?2 g9 h3 l
- default:. J- o( ?& G+ l) m$ q5 A
- /* 其他的键值不处理 */. }' b4 z8 S) k( d& Y. s/ Y
- break;( f$ u7 F1 D0 k/ a
- }
+ S X2 w6 n4 Y8 U% j6 B" d8 N* Q$ ^& l - }* S' m8 s: L: C4 N4 X! e
- }
/ C0 V$ c- g0 u% s$ K" d% | - }
' M+ _, }1 l" r: V
4 p8 }3 K" s5 ?
8 s$ f8 f* |; g/ G6 N/ j77.13 总结$ E. p2 q( v' m" b) T5 \# z
本章节涉及到的知识点非常多,实战性较强,需要大家稍花点精力去研究。( ?/ z, T% H% X5 t9 P. _/ D1 E
( e5 p3 I' J! \; a T8 f
: H7 ?# b( L1 \! U) Z
1 p- z. _% q5 F- R. X6 _9 H |
.png) STMCU小助手
发布时间:2021-11-4 18:10
STMCU小助手
发布时间:2021-11-4 18:10





















 微信公众号
微信公众号
 手机版
手机版