|
前言 测试代码的运行时间的两种方法: 借助示波器方法的实例 Delay_us函数使用STM32系统滴答定时器实现: - <font face="Tahoma" color="#000000">
- #include "systick.h"
- /* SystemFrequency / 1000 1ms中断一次
- * SystemFrequency / 100000 10us中断一次
- * SystemFrequency / 1000000 1us中断一次
- */
- #define SYSTICKPERIOD 0.000001
- #define SYSTICKFREQUENCY (1/SYSTICKPERIOD)
- /**
- * @brief 读取SysTick的状态位COUNTFLAG
- * @param 无
- * @retval The new state of USART_FLAG (SET or RESET).
- */
- static FlagStatus SysTick_GetFlagStatus(void)
- {
- if(SysTick->CTRL&SysTick_CTRL_COUNTFLAG_Msk)
- {
- return SET;
- }
- else
- {
- return RESET;
- }
- }
- /**
- * @brief 配置系统滴答定时器 SysTick
- * @param 无
- * @retval 1 = failed, 0 = successful
- */
- uint32_t SysTick_Init(void)
- {
- /* 设置定时周期为1us */
- if (SysTick_Config(SystemCoreClock / SYSTICKFREQUENCY))
- {
- /* Capture error */
- return (1);
- }
- /* 关闭滴答定时器且禁止中断 */
- SysTick->CTRL &= ~ (SysTick_CTRL_ENABLE_Msk | SysTick_CTRL_TICKINT_Msk);
- return (0);
- }
- /**
- * @brief us延时程序,10us为一个单位
- * @param
- * @arg nTime: Delay_us( 10 ) 则实现的延时为 10 * 1us = 10us
- * @retval 无
- */
- void Delay_us(__IO uint32_t nTime)
- {
- /* 清零计数器并使能滴答定时器 */
- SysTick->VAL = 0;
- SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk;
- for( ; nTime > 0 ; nTime--)
- {
- /* 等待一个延时单位的结束 */
- while(SysTick_GetFlagStatus() != SET);
- }
- /* 关闭滴答定时器 */
- SysTick->CTRL &= ~ SysTick_CTRL_ENABLE_Msk;
- }</font>
检验Delay_us执行时间中用到的GPIO(gpio.h、gpio.c)的配置: - <font face="Tahoma" color="#000000">#ifndef __GPIO_H
- #define __GPIO_H
- #include "stm32f10x.h"
- #define LOW 0
- #define HIGH 1
- /* 带参宏,可以像内联函数一样使用 */
- #define TX(a) if (a) \
- GPIO_SetBits(GPIOB,GPIO_Pin_0);\
- else \
- GPIO_ResetBits(GPIOB,GPIO_Pin_0)
- void GPIO_Config(void);
- #endif
- #include "gpio.h"
- /**
- * @brief 初始化GPIO
- * @param 无
- * @retval 无
- */
- void GPIO_Config(void)
- {
- /*定义一个GPIO_InitTypeDef类型的结构体*/
- GPIO_InitTypeDef GPIO_InitStructure;
- /*开启LED的外设时钟*/
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- }</font>
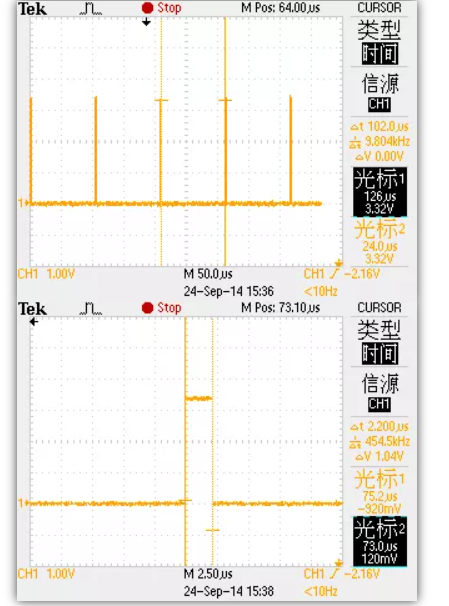
在main函数中检验Delay_us的执行时间: 示波器的观察结果: 可见Delay_us(100),执行了大概102us,而Delay_us(1)执行了2.2us。 更改一下main函数的延时参数: 示波器的观察结果: 可见Delay_us(100),执行了大概101us,而Delay_us(10)执行了11.4us。 结论:此延时函数基本上还是可靠的。 使用定时器方法的实例
Delay_us函数使用STM32定时器2实现: - <font face="Tahoma" color="#000000">#include "timer.h"
- /* SystemFrequency / 1000 1ms中断一次
- * SystemFrequency / 100000 10us中断一次
- * SystemFrequency / 1000000 1us中断一次
- */
- #define SYSTICKPERIOD 0.000001
- #define SYSTICKFREQUENCY (1/SYSTICKPERIOD)
- /**
- * @brief 定时器2的初始化,,定时周期1uS
- * @param 无
- * @retval 无
- */
- void TIM2_Init(void)
- {
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- /*AHB = 72MHz,RCC_CFGR的PPRE1 = 2,所以APB1 = 36MHz,TIM2CLK = APB1*2 = 72MHz */
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
- /* Time base configuration */
- TIM_TimeBaseStructure.TIM_Period = SystemCoreClock/SYSTICKFREQUENCY -1;
- TIM_TimeBaseStructure.TIM_Prescaler = 0;
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
- TIM_ARRPreloadConfig(TIM2, ENABLE);
- /* 设置更新请求源只在计数器上溢或下溢时产生中断 */
- TIM_UpdateRequestConfig(TIM2,TIM_UpdateSource_Global);
- TIM_ClearFlag(TIM2, TIM_FLAG_Update);
- }
- /**
- * @brief us延时程序,10us为一个单位
- * @param
- * @arg nTime: Delay_us( 10 ) 则实现的延时为 10 * 1us = 10us
- * @retval 无
- */
- void Delay_us(__IO uint32_t nTime)
- {
- /* 清零计数器并使能滴答定时器 */
- TIM2->CNT = 0;
- TIM_Cmd(TIM2, ENABLE);
- for( ; nTime > 0 ; nTime--)
- {
- /* 等待一个延时单位的结束 */
- while(TIM_GetFlagStatus(TIM2, TIM_FLAG_Update) != SET);
- TIM_ClearFlag(TIM2, TIM_FLAG_Update);
- }
- TIM_Cmd(TIM2, DISABLE);
- }</font>
在main函数中检验Delay_us的执行时间: - <font face="Tahoma" color="#000000">#include "stm32f10x.h"
- #include "Timer_Drive.h"
- #include "gpio.h"
- #include "systick.h"
- TimingVarTypeDef Time;
- int main(void)
- {
- TIM2_Init();
- SysTick_Init();
- SysTick_Time_Init(&Time);
- for(;;)
- {
- SysTick_Time_Start();
- Delay_us(1000);
- SysTick_Time_Stop();
- }
- }</font>
怎么去看检测结果呢?用调试的办法,打开调试界面后,将Time变量添加到Watch一栏中。然后全速运行程序,既可以看到Time中保存变量的变化情况,其中TimeWidthAvrage就是最终的结果。 可以看到TimeWidthAvrage的值等于0x119B8,十进制数对应72120,滴答定时器的一个滴答为1/72M(s),所以Delay_us(1000)的执行时间就是72120*1/72M (s) = 0.001001s,也就是1ms。验证成功。 备注:定时器方法输出检测结果有待改善,你可以把得到的TimeWidthAvrage转换成时间(以us、ms、s)为单位,然后通过串口打印出来,不过这部分工作对于经常使用调试的人员来说也可有可无。 两种方法对比软件测试方法 操作起来复杂,由于在原代码基础上增加了测试代码,可能会影响到原代码的工作,测试可靠性相对较低。由于使用32位的变量保存systick的计数次数,计时的最大长度可以达到2^32/72M = 59.65 s。 示波器方法 操作简单,在原代码基础上几乎没有增加代码,测试可靠性很高。由于示波器的显示能力有限,超过1s以上的程序段,计时效果不是很理想。但是,通常的单片机程序实时性要求很高,一般不会出现程序段时间超过秒级的情况。
| .png) STMCU小助手
发布时间:2021-11-7 15:39
STMCU小助手
发布时间:2021-11-7 15:39
![3H]P{7Z537([92MUCNH7CT9.png](data/attachment/forum/202111/07/153708tkwrwwiq0jzb0lfa.png "3H]P{7Z537([92MUCNH7CT9.png")
UD_(99}T.png")
![X2HEQI]HZ_B{W1EI9AGFR7F.png](data/attachment/forum/202111/07/153646wqdg3rhh8hzggqj4.png "X2HEQI]HZ_B{W1EI9AGFR7F.png")
6PJ@Y7WDJ3`Q8D}J@X.png")

 微信公众号
微信公众号
 手机版
手机版