.png) STMCU小助手
发布时间:2021-11-17 23:02
STMCU小助手
发布时间:2021-11-17 23:02
|
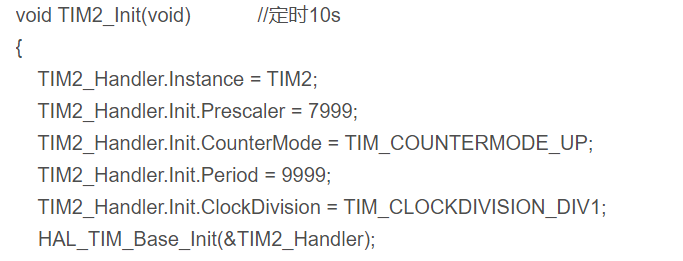
MCU:stm32L0 主要搞清楚系统时钟,我在上文设置系统时钟为HSE(外部高速时钟),设置为8M。 //SYSCLK=Fs*PLLMUL/PLLDIV; //Fusb=Fvco/pllq=Fs*(plln/(pllm*pllq)); //SYSCLK = //Fs 8M //Fvco: 8M //SYSCLK: 系统时钟频率 8*8/2=32 //PLLMUL:倍频 8 //PLLDIV:分频系数 2 以上配置,设置AHB为 32M,AHB1为4M,AHB2为32M 通用定时器时钟为AHB1时钟的2倍,8M。 可以由如下公式计算定时时间,假设定时时间为10s,设置计数值(Period)为9999, 则计数频率为(计数值+1)/(计数值)=1000Hz 分频系数(Prescaler )为定时器时钟(8M)/计数频率 = 分频系数+1,为7999。 配置定时器代码如下:
|
 微信公众号
微信公众号
 手机版
手机版