代码环境
开发工具:STM32CUBEIDE
芯片:STM32L031K6T6
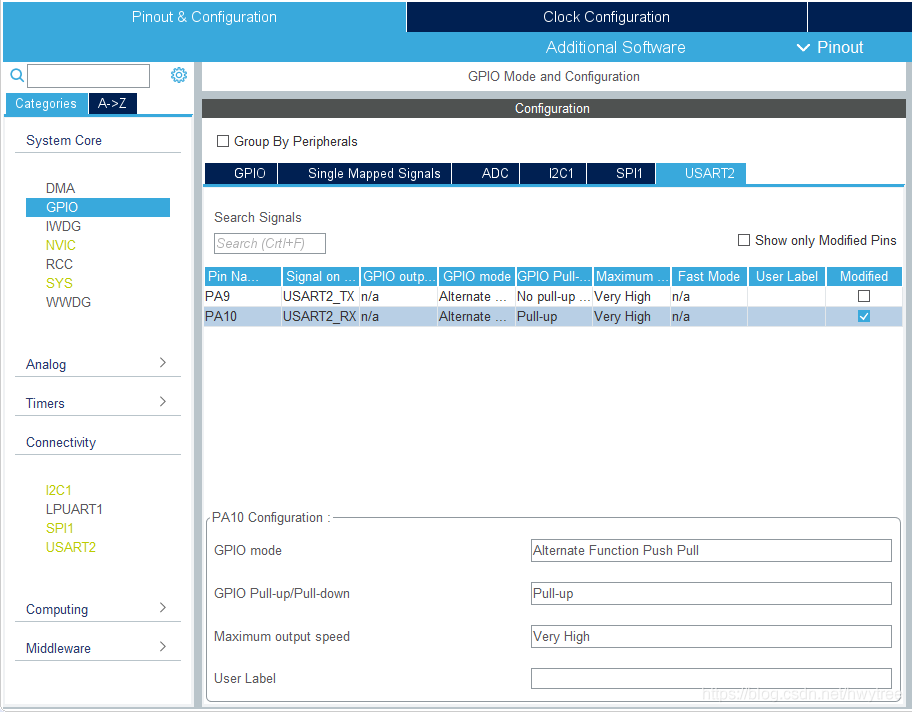
端口: UART2
基本配置
其中,PA9 (RX)的输入上拉,在System Core的GPIO里配置。
TX(发送)设计
TX部分增加bsp_usart.c和bsp_usart.h文件,以支持printf重载。
bsp_usart.h内容
- #ifndef __BSP_USART_H
- #define __BSP_USART_H
- #include "stm32l0xx_hal.h"
- #include "stdio.h"
- int fputc(int ch, FILE *f);
- #endif
bsp_usart.c内容
- #include <bsp_usart.h>
- extern UART_HandleTypeDef huart2;
- /* USER CODE BEGIN 1 */
- #ifdef __GNUC__
- /* With GCC/RAISONANCE, small printf (option LD Linker->Libraries->Small printf
- set to 'Yes') calls __io_putchar() */
- #define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
- #else
- #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
- #endif /* __GNUC__ */
- /**
- * @brief Retargets the C library printf function to the USART.
- * @param None
- * @retval None
- */
- PUTCHAR_PROTOTYPE {
- /* Place your implementation of fputc here */
- /* e.g. write a character to the EVAL_COM1 and Loop until the end of transmission */
- HAL_UART_Transmit(&huart2, (uint8_t*) &ch, 1, 0xFFFF);
- return ch;
- }
- /* USER CODE END 1 */
在main.c文件里引入头文件
- #include <stdbool.h>
- #include <string.h>
- #include <stdio.h>
- #include "bsp_usart.h"
然后,就可以使用printf(“uart2 output data = %d \r\n”, data);了。
RX(接收)设计
常规的串口接收设计,都需要设计当前接收字节后的超时识别,如果出现超时,认为接收结束。即使是固定字节长度的传输,也需要为异常情况下设计超时识别作为传输结束。
STM32 HAL库支持轮询超时的方式接收串口数据(HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)),也支持中断的方式接收串口数据(HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)),因此考虑将两种方式结合使用,以简化超时判断的设计。
主要的设计思路是:1.通过中断接收第一个字节;2. 通过轮询接收后续字节。
main()函数前初始化相关代码,部分代码由STM32CUBEIDE自动生成:
- /* Private macro -------------------------------------------------------------*/
- /* USER CODE BEGIN PM */
- #define UART2_RX_STOP 0
- #define UART2_RX_START 1
- /* USER CODE END PM */
- /* Private variables ---------------------------------------------------------*/
- UART_HandleTypeDef huart2;
- /* USER CODE BEGIN PV */
- uint8_t aRxBuffer; //RX int buffer, 1 byte
- uint8_t Uart2_RxBuff[10] = {0}; //Rx buffer,should be adjusted according to Rx max byte length per communication.
- uint8_t uart2_rx_flag = UART2_RX_STOP;
- HAL_StatusTypeDef uart2_status_rx;
- /* Private function prototypes -----------------------------------------------*/
- void SystemClock_Config(void);
- static void MX_USART2_UART_Init(void);
main()函数相关代码,部分代码由STM32CUBEIDE自动生成:
- int main(void)
- {
- /* USER CODE BEGIN 1 */
- /* USER CODE END 1 */
- /* MCU Configuration--------------------------------------------------------*/
- /* Reset of all peripherals, Initializes the Flash interface and the Systick. */
- HAL_Init();
- /* USER CODE BEGIN Init */
- /* USER CODE END Init */
- /* Configure the system clock */
- SystemClock_Config();
- /* USER CODE BEGIN SysInit */
- /* USER CODE END SysInit */
- /* Initialize all configured peripherals */
- MX_USART2_UART_Init();
- /* USER CODE BEGIN 2 */
- /* USER CODE END 2 */
- /* Infinite loop */
- /* USER CODE BEGIN WHILE */
- if (HAL_UART_Receive_IT(&huart2, (uint8_t *)&aRxBuffer, 1)!=HAL_OK) printf("UART2 IT FAILED! \r\n");
- while (1)
- {
- /* USER CODE END WHILE */
- /* USER CODE BEGIN 3 */
- if (uart2_rx_flag == UART2_RX_START)
- {
- uart2_status_rx = HAL_UART_Receive(&huart2, Uart2_RxBuff+1, 9, 100);
- printf("uart2 got rx data: %d %d %d %d %d %d %d %d %d %d\r\n", Uart2_RxBuff[0], Uart2_RxBuff[1], Uart2_RxBuff[2], Uart2_RxBuff[3], Uart2_RxBuff[4], Uart2_RxBuff[5], Uart2_RxBuff[6], Uart2_RxBuff[7], Uart2_RxBuff[8], Uart2_RxBuff[9]);
- uart2_rx_flag = UART2_RX_STOP;
- memset(Uart2_RxBuff, 0, sizeof(Uart2_RxBuff));
- MX_USART2_UART_Init();
- HAL_UART_Receive_IT(&huart2, (uint8_t *)&aRxBuffer, 1);
- }
- HAL_Delay(1); //must for timing
- }
- /* USER CODE END 3 */
- }
中断响应通过函数HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle)的重载实现。
- void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle)
- {
- Uart2_RxBuff[0] = aRxBuffer;
- uart2_rx_flag = UART2_RX_START;
- //printf("uart2 get rx interrupt!\r\n");
- return;
- }
注意事项
HAL_UART_Receive()不能放在HAL_UART_RxCpltCallback()函数里处理,HAL_UART_Receive()的Timeout会失效。这是因为SysTick的中断优先级低于了外设UART的中断优先级,在UART的中断处理过程中无法响应SysTick中断。(如果一定要把HAL_UART_Receive()放在HAL_UART_RxCpltCallback()函数里,就需要调整SysTick中断的优先级)。
main()里的while(1)循环,需要延时HAL_Delay(1), 时序才正常。
-End-
|
.png) STMCU小助手
发布时间:2021-11-16 01:34
STMCU小助手
发布时间:2021-11-16 01:34




 微信公众号
微信公众号
 手机版
手机版