所谓的硬件I2C就是STM32芯片上有其相应的外设和驱动电路,通过配置相应的寄存器,就可以完成I2C的通信。本节实验我们介绍软件模拟I2C,软件I2C一般是通过GPIO引脚,按照I2C的时序要求来控制引脚电平状态以产生通讯时序。
1、I2C通信流程中包含信号如下:
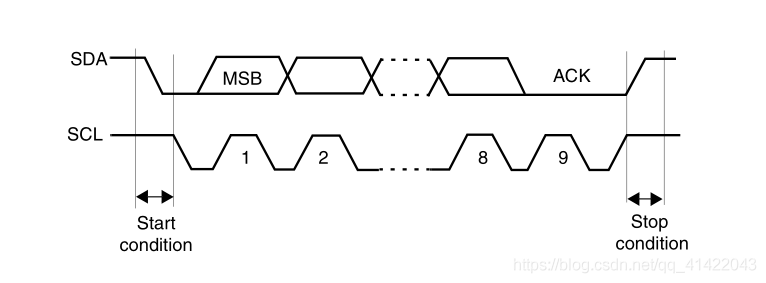
开始信号:SCL为高电平时,SDA由高电平向低电平跳变,开始传送数据。
结束信号:SCL为高电平时,SDA由低电平向高电平跳变,结束传送数据。
应答信号:发送器每发送一个字节,就在第9个时钟脉冲期间释放数据线,由接收器反馈一个应答信号。 应答信号为低电平时,规定为有效应答位(ACK简称应答位),表示接收器已经成功地接收了该字节;应答信号为高电平时,规定为非应答位(NACK),一般表示接收器接收该字节没有成功。对于反馈有效应答位ACK的要求是,接收器在第9个时钟脉冲之前的低电平期间将SDA线拉低,并且确保在该时钟的高电平期间为稳定的低电平。 如果接收器是主控器,则在它收到最后一个字节后,发送一个NACK信号,以通知被控发送器结束数据发送,并释放SDA线,以便主控接收器发送一个停止信号。
2、I2C总线时序图如下:

3、I2C通讯过程的基本结构如下所示:
1)主机写数据到从机

2)主机由从机中读数据

3)I2C通讯复合格式


其中 S 表示由主机的 I2C接口产生的传输起始信号(S),这时连接到 I2C总线上的所有从机都会接收到这个信号。
起始信号产生后,所有从机就等待主机广播从机地址信号(SLAVE_ADDRESS)。在 I2C总线上,每个设备的地址都是唯一的,当主机广播的地址与某个设备地址相同时,这个设备就被选中了,没被选中的设备将会忽略之后的数据信号。根据 I2C协议,这个从机地址可以是 7位或 10位。
在地址位之后,是传输方向的选择位,该位为 0时,表示后面的数据传输方向是由主机传输至从机,即主机向从机写数据。该位为 1时,则相反,即主机由从机读数据。
从机接收到匹配的地址后,会返回一个应答(ACK)或非应答(NACK)信号,只有接收到应答信号后,主机才能继续发送或接收数据。
若配置的方向传输位为“写数据”方向,即第一幅图的情况,广播完地址,接收到应答信号后,主机开始正式向从机传输数据(DATA),数据包的大小为 8位,主机每发送完一个字节数据,都要等待从机的应答信号(ACK),重复这个过程,可以向从机传输 N 个数据,这个 N没有大小限制。当数据传输结束时,主机向从机发送一个停止传输信号(P),表示不再传输数据。
若配置的方向传输位为“读数据”方向,即第二幅图的情况,广播完地址,接收到应答信号后,从机开始向主机返回数据(DATA),数据包大小也为 8 位,从机每发送完一个数据,都会等待主机的应答信号(ACK),重复这个过程,可以返回 N 个数据,这个 N 也没有大小限制。当主机希望停止接收数据时,就向从机返回一个非应答信号(NACK),则从机自动停止数据传输。
除了基本的读写,I2C通讯更常用的是复合格式,即第三幅图的情况,该传输过程有两次起始信号(S)。一般在第一次传输中,主机通过 SLAVE_ADDRESS寻找到从设备后,发送一段“数据”,这段数据通常用于表示从设备内部的寄存器或存储器地址(注意区分它与 SLAVE_ADDRESS 的区别);在第二次的传输中,对该地址的内容进行读或写。也就是说,第一次通讯是告诉从机读写地址,第二次则是读写的实际内容。
4)数据有效性时序图如下:

I2C总线进行数据传送时,时钟信号为高电平期间,数据线上的数据必须保持稳定,只有在时钟线上的信号为低电平期间,数据线上的高电平或低电平状态才允许变化。 即:数据在SCL的上升沿到来之前就需准备好。并在下降沿到来之前必须稳定。
5)地址及数据方向
I2C 总线上的每个设备都有自己的独立地址,主机发起通讯时,通过 SDA 信号线发送设备地址(SLAVE_ADDRESS)来查找从机。I2C 协议规定设备地址可以是 7位或 10 位,实际中 7 位的地址应用比较广泛。紧跟设备地址的一个数据位用来表示数据传输方向,它是数据方向位(R/W),第 8位或第 11 位。数据方向位为“1”时表示主机由从机读数据,该位为“0”时表示主机向从机写数据,如图:

读数据方向时,主机会释放对 SDA信号线的控制,由从机控制 SDA 信号线,主机接收信号,写数据方向时,SDA由主机控制,从机接收信号。
bsp_soft_i2c.c程序如下:
- #include "bsp_soft_i2c.h"
- #include <stdbool.h>
- // 初始化IIC的IO口
- void I2C2_Soft_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure; // 定义GPIO结构体
-
- RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB, ENABLE); // 打开GPIOB口时钟
-
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; // 输出
- GPIO_InitStructure.GPIO_OType = GPIO_OType_OD; // 开漏
- GPIO_InitStructure.GPIO_Pin = Pin_SCL | Pin_SDA ; // IIC对应IO口
- GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; // 上拉
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_Level_3; // 50MHZ
- GPIO_Init(GPIOB, &GPIO_InitStructure); // 初始化GPIO
-
- I2C2_Stop();
- }
- // 发送IIC起始信号
- bool I2C2_Start(void)
- {
- Pin_SCL_H; // 拉高时钟线
- Pin_SDA_H; // 拉高信号线
- I2C2_Delay1us();
- if(!Read_SDA_Pin) return false;
- Pin_SDA_L;
- I2C2_Delay1us();
- Pin_SDA_L;
- I2C2_Delay1us();
- return true;
- }
- // 发送IIC停止信号
- bool I2C2_Stop(void)
- {
- Pin_SCL_H;
- Pin_SDA_L;
- I2C2_Delay1us();
- if(Read_SDA_Pin) return false;
- Pin_SDA_H;
- I2C2_Delay1us();
- if(!Read_SDA_Pin) return false;
- Pin_SDA_H;
- I2C2_Delay1us();
- return true;
- }
- // IIC发送ACK信号
- void I2C2_Ack(void)
- {
- Pin_SCL_L;
- I2C2_Delay1us();
- Pin_SDA_L;
- Pin_SCL_H;
- I2C2_Delay1us();
- Pin_SCL_L;
- Pin_SDA_H;
- I2C2_Delay1us();
- }
- // IIC不发送ACK信号
- void I2C2_NAck(void)
- {
- Pin_SCL_L;
- I2C2_Delay1us();
- Pin_SDA_H;
- Pin_SCL_H;
- I2C2_Delay1us();
- Pin_SCL_L;
- I2C2_Delay1us();
- }
- // IIC等待ACK信号
- uint8_t I2C2_Wait_Ack(void)
- {
- Pin_SCL_L;
- I2C2_Delay1us();
- Pin_SDA_H;
- Pin_SCL_H;
- I2C2_Delay1us();
- if(Read_SDA_Pin)
- {
- Pin_SCL_L;
- I2C2_Delay1us();
- return false;
- }
- Pin_SCL_L;
- I2C2_Delay1us();
- return true;
- }
- // IIC发送一个字节
- void I2C2_Send_Byte(uint8_t txd)
- {
- for(uint8_t i=0; i<8; i++)
- {
- Pin_SCL_L;
- I2C2_Delay1us();
- if(txd & 0x80)
- Pin_SDA_H;
- else
- Pin_SDA_L;
- txd <<= 1;
- Pin_SCL_H;
- I2C2_Delay1us();
- }
- }
- // IIC读取一个字节
- uint8_t I2C2_Read_Byte(void)
- {
- uint8_t rxd = 0;
- for(uint8_t i=0; i<8; i++)
- {
- rxd <<= 1;
- Pin_SCL_L;
- I2C2_Delay1us();
- Pin_SCL_H;
- I2C2_Delay1us();
- if(Read_SDA_Pin)
- {
- rxd |= 0x01;
- }
- }
- return rxd;
- }
- // 向从机指定地址写数据
- bool I2C_Write_REG(uint8_t SlaveAddress, uint8_t REG_Address,uint8_t REG_data)
- {
- if(!I2C2_Start()) return false;
- I2C2_Send_Byte(SlaveAddress);
- if(!I2C2_Wait_Ack()) { I2C2_Stop(); return false; }
- I2C2_Send_Byte(REG_Address);
- if(!I2C2_Wait_Ack()) { I2C2_Stop(); return false; }
- I2C2_Send_Byte(REG_data);
- if(!I2C2_Wait_Ack()) { I2C2_Stop(); return false; }
- if(!I2C2_Stop()) return false;
- return true;
- }
- // 从设备中读取数据
- uint8_t I2C2_Read_REG(uint8_t SlaveAddress,uint8_t REG_Address)
- {
- uint8_t data;
- if(!I2C2_Start()) return false;
- I2C2_Send_Byte(SlaveAddress);
- if(!I2C2_Wait_Ack()) { I2C2_Stop(); return false; }
- I2C2_Send_Byte(REG_Address);
- if(!I2C2_Wait_Ack()) { I2C2_Stop(); return false; }
- if(!I2C2_Start()) return false;
- I2C2_Send_Byte(SlaveAddress + 1);
- if(!I2C2_Wait_Ack()) { I2C2_Stop(); return false; }
- data = I2C2_Read_Byte();
- I2C2_NAck();
- if(!I2C2_Stop()) return false;
- return data;
- }
- // 连续写N个字节
- bool I2C2_Write_NByte(uint8_t SlaveAddress, uint8_t REG_Address, uint8_t* buf, uint8_t len)
- {
- if(!I2C2_Start())return false;
- I2C2_Send_Byte(SlaveAddress); //发送设备地址+写信号
- if(!I2C2_Wait_Ack()){I2C2_Stop(); return false;}
- I2C2_Send_Byte(REG_Address);
- if(!I2C2_Wait_Ack()){I2C2_Stop(); return false;}
- for(uint16_t i=0; i<len; i++)
- {
- I2C2_Send_Byte(buf<i>);
- </i> if(i<len-1)
- {
- if(!I2C2_Wait_Ack()){I2C2_Stop(); return false;}
- }
- }
- I2C2_Stop();
- return true;
- }
- // 连续读N个字节
- bool I2C2_Read_NByte(uint8_t SlaveAddress, uint8_t REG_Address, uint8_t* buf, uint8_t len)
- {
- if(!I2C2_Start())return false;
- I2C2_Send_Byte(SlaveAddress); //发送设备地址+写信号
- if(!I2C2_Wait_Ack()){I2C2_Stop(); return false;}
- I2C2_Send_Byte(REG_Address);
- if(!I2C2_Wait_Ack()){I2C2_Stop(); return false;}
- if(!I2C2_Start())return false;
- I2C2_Send_Byte(SlaveAddress | 1); // 读操作
- if(!I2C2_Wait_Ack()){I2C2_Stop(); return false;}
- for(uint16_t i=0; i<len; i++)
- {
- buf = I2C2_Read_Byte();
- if(i<len-1)
- {
- I2C2_Ack();
- }
- }
- I2C2_NAck();
- I2C2_Stop();
- return true;
- }
- // 检查设备地址
- bool I2C2_CheckDevice(uint8_t SlaveAddress)
- {
- if(!I2C2_Start()) return false;
- I2C2_Send_Byte(SlaveAddress);
- if(!I2C2_Wait_Ack())
- {
- I2C2_Stop();
- return false;
- }
- if(!I2C2_Stop()) return false;
- return true;
- }
bsp_soft_i2c.h程序如下:
- #ifndef _BSP_SOFT_I2C_H_
- #define _BSP_SOFT_I2C_H_
- #include "stm32f0xx.h"
- #include <stdbool.h>
- // 定义内联延时函数
- static inline void I2C2_Delay1us(void)
- {
- __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
- __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
- __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
- __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
- __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
- __nop();__nop();__nop();__nop();__nop();__nop();__nop();__nop();
- }
- #define I2C2_GPIOx GPIOB
- #define Pin_SCL GPIO_Pin_10
- #define Pin_SDA GPIO_Pin_11
- #define Pin_SCL_L I2C2_GPIOx->ODR &= ~Pin_SCL
- #define Pin_SCL_H I2C2_GPIOx->ODR |= Pin_SCL
- #define Pin_SDA_L I2C2_GPIOx->ODR &= ~Pin_SDA
- #define Pin_SDA_H I2C2_GPIOx->ODR |= Pin_SDA
- #define Read_SDA_Pin I2C2_GPIOx->IDR & Pin_SDA
- void I2C2_Soft_Init(void);
- bool I2C2_Start(void);
- bool I2C2_Stop(void);
- void I2C2_Send_Byte(uint8_t txd);
- uint8_t I2C2_Read_Byte(void);
- uint8_t I2C2_Wait_Ack(void);
- void I2C2_Ack(void);
- void I2C2_NAck(void);
- bool I2C2_Write_REG(uint8_t SlaveAddress,uint8_t REG_Address,uint8_t REG_data);
- uint8_t I2C2_Read_REG(uint8_t SlaveAddress,uint8_t REG_Address);
- bool I2C2_Write_NByte(uint8_t SlaveAddress, uint8_t REG_Address, uint8_t* buf, uint8_t len);
- bool I2C2_Read_NByte(uint8_t SlaveAddress, uint8_t REG_Address, uint8_t* buf, uint8_t len);
- bool I2C2_CheckDevice(uint8_t SlaveAddress);
- #endif
|
.png) STMCU小助手
发布时间:2021-11-21 21:00
STMCU小助手
发布时间:2021-11-21 21:00
 微信公众号
微信公众号
 手机版
手机版