.png) STMCU小助手
发布时间:2022-1-17 21:41
STMCU小助手
发布时间:2022-1-17 21:41
|
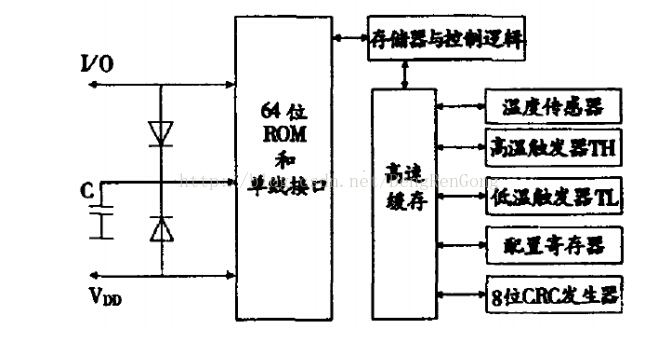
DS18B20 是由 DALLAS 半导体公司推出的一种的“一线总线”接口的温度传感器。与传统的热敏电阻等测温元件相比,它是一种新型的体积小、适用电压宽、与微处理器接口简单的数字化温度传感器。一线总线结构具有简洁且经济的特点,可使用户轻松地组建传感器网络,从而为测量系统的构建引入全新概念,测量温度范围为-55~+125℃ ,精度为±0.5℃。现场温度直接以“一线总线”的数字方式传输,大大提高了系统的抗干扰性。它能直接读出被测温度,并且可根据实际要求通过简单的编程实现 9~l2 位的数字值读数方式。它工作在 3—5. 5 V 的电压范围,采用多种封装形式,从而使系统设计灵活、方便,设定分辨率及用户设定的报警温度 存储在 EEPROM 中,掉电后依然保存 其内部结构如下所示 
 DS18B20的通讯方式是单总线的,一般而言,我们遇到的封装都是如下 
 其中DQ就是主要的通讯线路,对DS的读取和写入都需要主机来控制DQ线路的DQ高低电平的时间来确定,具体如下 一般而言,DQ线需要接一个上拉电阻,所以,才写操作的最后一步都需要将总线拉高 
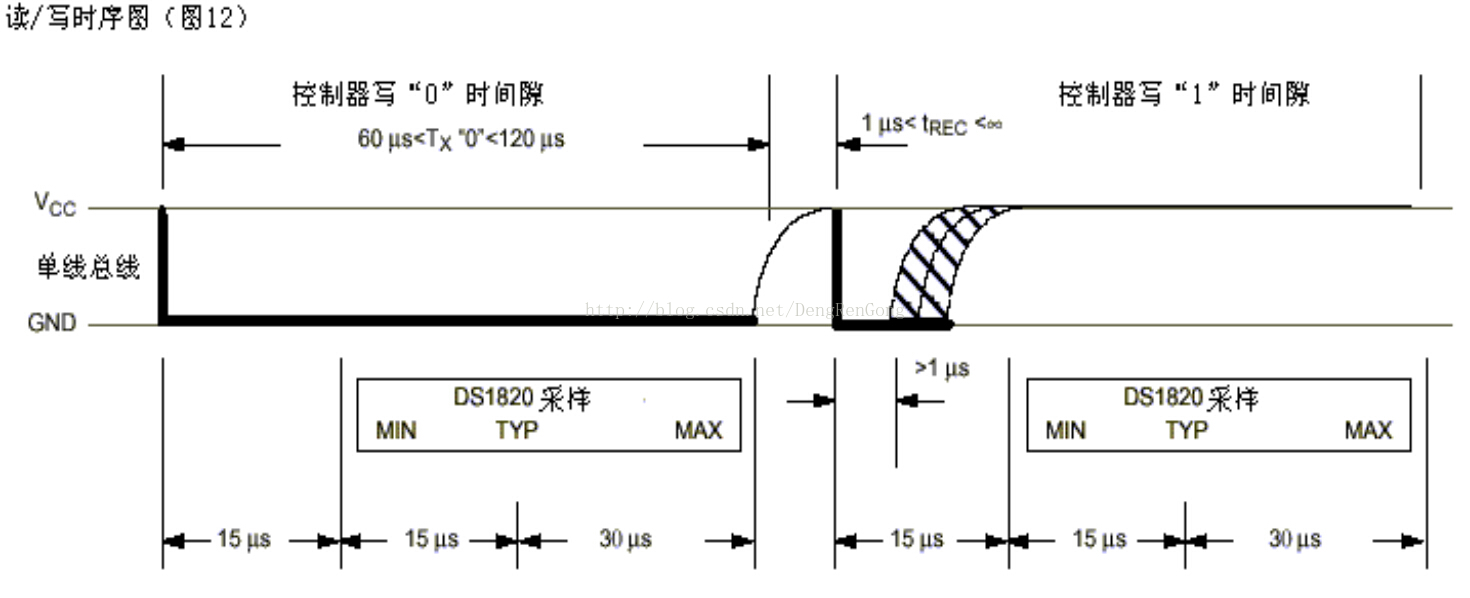 向DS写0需要总线拉低至少60US最多120US就算完成,也就是说,1-->0(持续60-120us)-->1 写入了0 像DS写入1需要总线拉低最少1us最多15US,然后总线拉高,拉高时间至少15us,一般40us以上即可 1->0(1-15us,推荐5us)-->1(持续15us以上,推荐40us) 由此可见,DS的总线采样实在总线拉低之后的15us开始的 
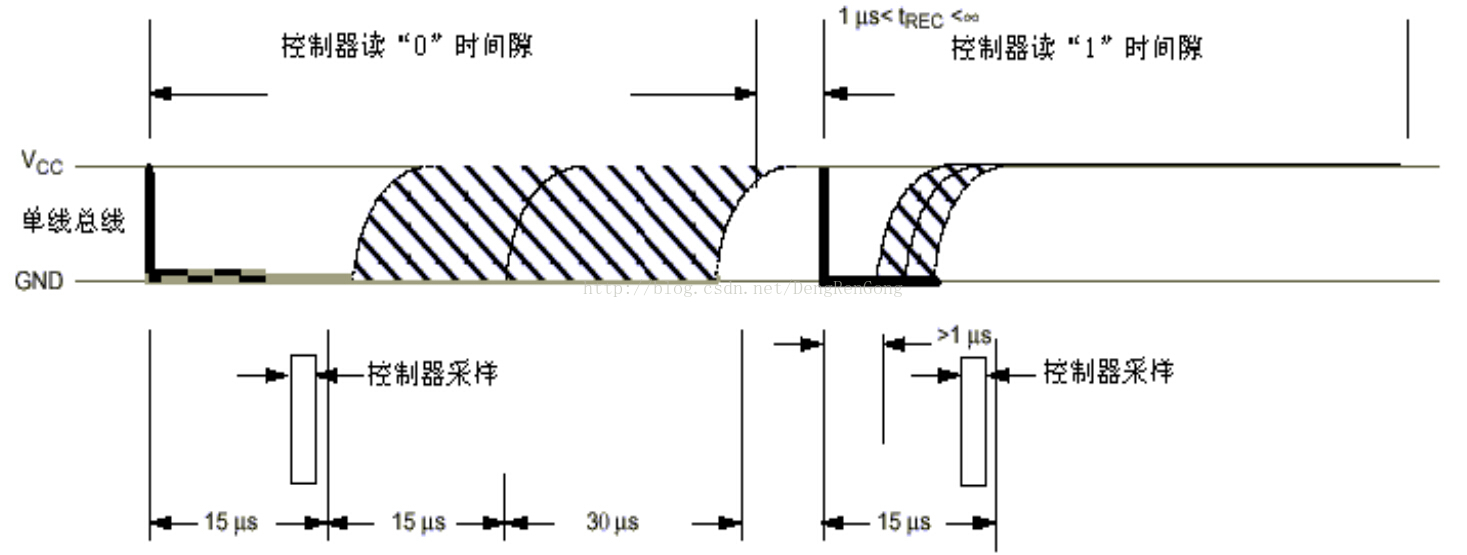 读取DS分别为读取1和读取0,但是这两者时序是统一的 首先总线拉低至少1us,最多15us,还是选择2us,然后释放总线(也就是说进入输入模式),等待15us以上的事件,然后采样,高电平为1低电平为0 1-->0(持续2us,最多15us)-->等待15us以上60us以下-->采样总线电平,得到1或者0,记得采样完成之后切换到输出模式将总线拉高便于下一次使用 DS18B20的命令 DS1820有三个主要数字部件:1)64位激光ROM,2)温度传感器,3)非易失性温度报警触发器TH和TL 


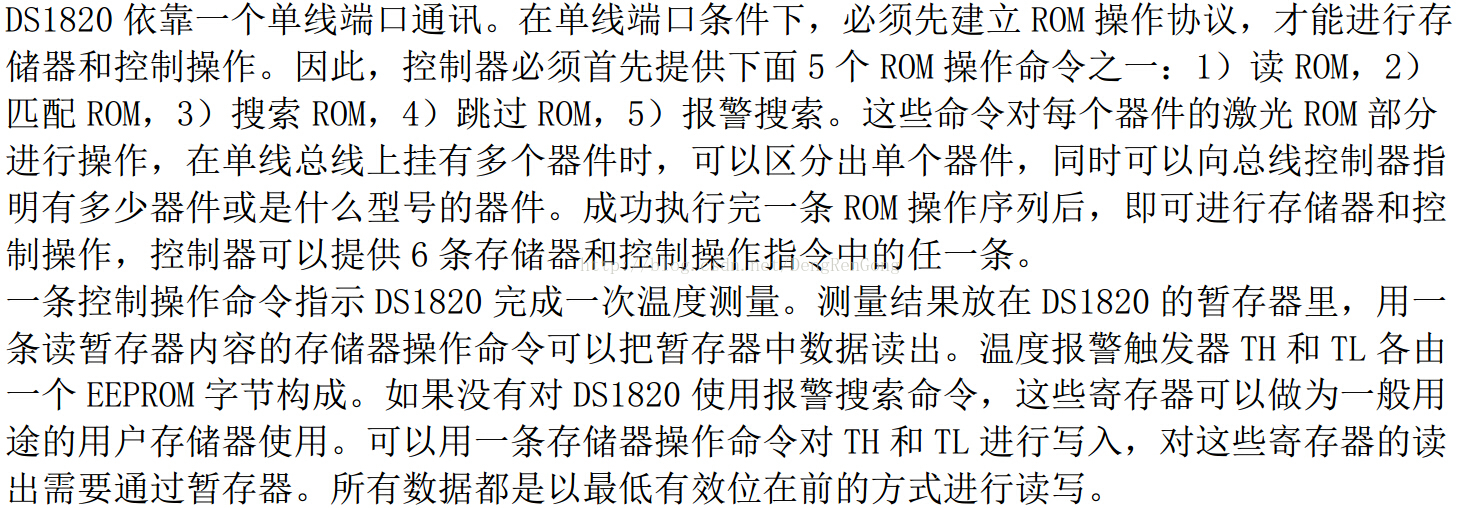 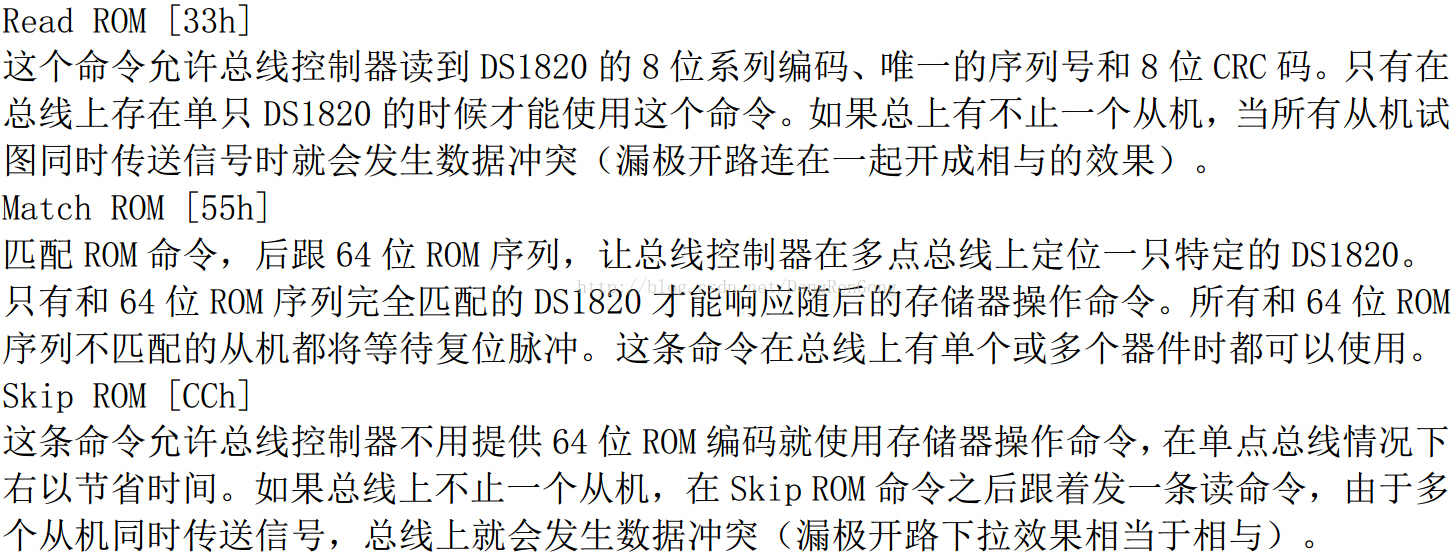 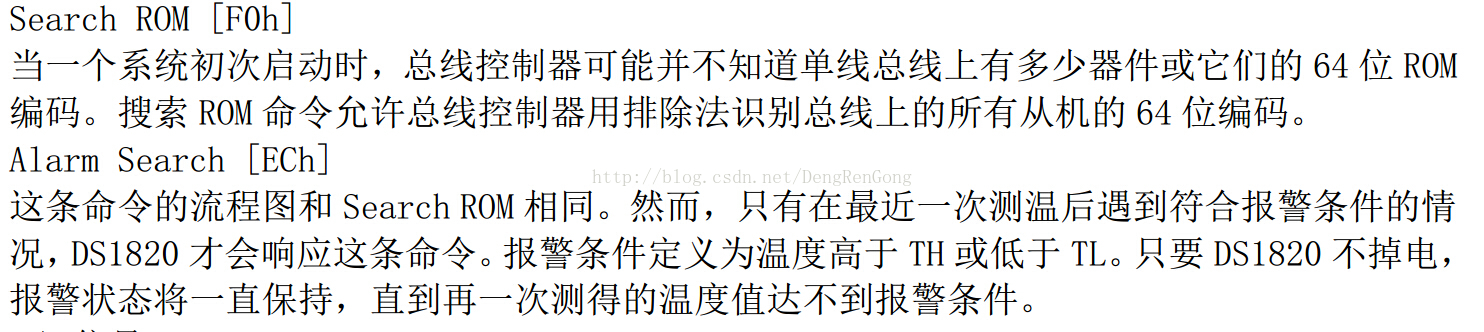 启动温度转换的命令是0X44,读取命令是0XBE 所以一般而言,对于DS的驱动包含以下几步 复位-->发 SKIP ROM 命令(0XCC)-->发开始转换命令(0X44)-->延时-->复 位-->发送 SKIP ROM 命令(0XCC)-->发读存储器命令(0XBE)-->连续读出两个字节数据(即 温度)-->结束 我们在读取的时候只读取两个字节的原因在于DS的存储器布局 
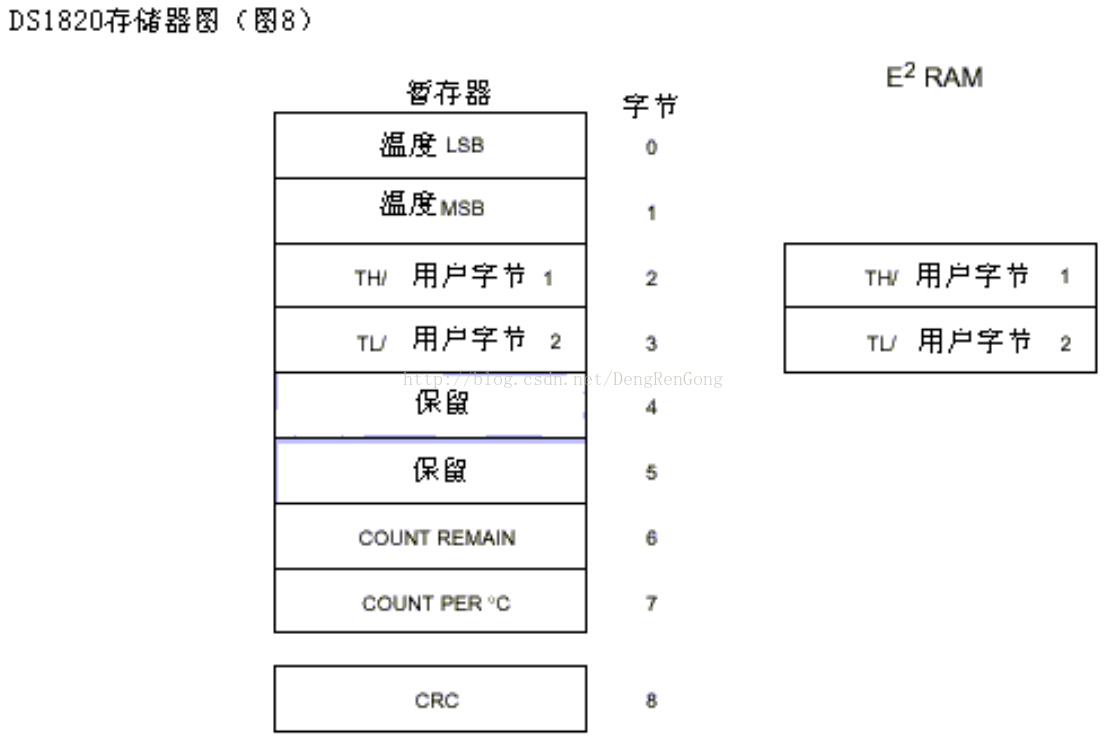 前两个就是我们需要的温度,当然也可以读取全部的,扩展驱动达到其他目的 以下是驱动代码,STM32驱动代码中使用了位段操作
|
【福利三:逢7发帖赢大礼】4、基于STM32G070板子SPI flash 移植SFUD库
【福利三:逢7发帖赢大礼】基于STM32G070板子的uart shell移植设计
【福利三:逢7发帖赢大礼】3、基于STM32G070板子的YModem串口协议通信
【福利三:逢7发帖赢大礼】2、基于STM32G070板子的OLED移植U8G2库
实战经验 | ClassB功能安全认证代码与应用代码分区的实现要点
STM32G0 系列 I2C 通信异常典型案例分析与解决方案总结
经验分享 | LAT1490 两个STM32G0 I2C 通信异常的案例分析
经验分享 | STM32G0 I2C bootloader Go 命令后调试连接失败:DBG_SWEN 位复位修复
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
 微信公众号
微信公众号
 手机版
手机版










