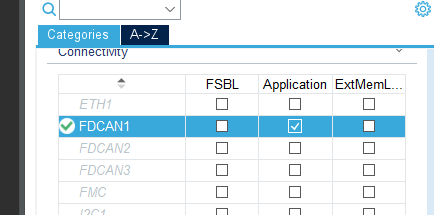
首先根据N6570DK的拓展引脚 在外设中打开FDCAN外设

可以看到FDCAN相比于传统的CAN 具有更多的配置,但是有一部分是我们用不到的 我们可以忽略掉

图中位CAN2.0B和CAN-FD的差异
首先最大的一个就是传输速度的差异 CAN-FD最高速度可以做到8Mbps 而CAN2.0速度仅为1Mbps
其次就是帧长度 CANFD的帧数据段长度可以做到64bit 传统CAN只能8bit
CanFD新增了FDF、BRS、ESI位
FDF:表示 CAN 报文还是 CAN-FD 报文;BRS:表示位速率转换,该位隐性时,速率可变(即 BSR 到 CRC 使用转换速率传输),该位为显性时,以正常的 CAN-FD 总线速率传输(恒定速率);ESI:表示发送节点状态。
CANFD可以向下兼容CAN2.0 但是CAN2.0不能发送FD报文
控制器配置

首先要选择工作模式 要把控制器配置为Classic Mode 这样才能配合外设发送报文
其次是时钟分频系数 以及采样点计算 can推荐的采样点一般设定到75%-85%左右 过高过低或者都会有问题
最后就是波特率的计算 设定为1Mbps
外设配置代码
static void MX_FDCAN1_Init(void)
{
/* USER CODE BEGIN FDCAN1_Init 0 */
/* USER CODE END FDCAN1_Init 0 */
/* USER CODE BEGIN FDCAN1_Init 1 */
/* USER CODE END FDCAN1_Init 1 */
hfdcan1.Instance = FDCAN1;
hfdcan1.Init.ClockDivider = FDCAN_CLOCK_DIV1;
hfdcan1.Init.FrameFormat = FDCAN_FRAME_CLASSIC;
hfdcan1.Init.Mode = FDCAN_MODE_NORMAL;
hfdcan1.Init.AutoRetransmission = ENABLE;
hfdcan1.Init.TransmitPause = ENABLE;
hfdcan1.Init.ProtocolException = DISABLE;
hfdcan1.Init.NominalPrescaler = 1;
hfdcan1.Init.NominalSyncJumpWidth = 16;
hfdcan1.Init.NominalTimeSeg1 = 63;
hfdcan1.Init.NominalTimeSeg2 = 16;
hfdcan1.Init.DataPrescaler = 1;
hfdcan1.Init.DataSyncJumpWidth = 4;
hfdcan1.Init.DataTimeSeg1 = 5;
hfdcan1.Init.DataTimeSeg2 = 4;
hfdcan1.Init.StdFiltersNbr = 1;
hfdcan1.Init.ExtFiltersNbr = 0;
hfdcan1.Init.TxFifoQueueMode = FDCAN_TX_FIFO_OPERATION;
if (HAL_FDCAN_Init(&hfdcan1) != HAL_OK)
{
Error_Handler();
}
还有发送配置
static void FDCAN_Config(void)
{
FDCAN_FilterTypeDef sFilterConfig;
/* Configure Rx filter */
sFilterConfig.IdType = FDCAN_STANDARD_ID;
sFilterConfig.FilterIndex = 0;
sFilterConfig.FilterType = FDCAN_FILTER_MASK;
sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO0;
sFilterConfig.FilterID1 = 0x0;
sFilterConfig.FilterID2 = 0x7FF;
if (HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig) != HAL_OK)
{
Error_Handler();
}
/* Configure global filter:
Filter all remote frames with STD and EXT ID
Reject non matching frames with STD ID and EXT ID */
if (HAL_FDCAN_ConfigGlobalFilter(&hfdcan1, FDCAN_REJECT, FDCAN_REJECT, FDCAN_FILTER_REMOTE, FDCAN_FILTER_REMOTE) != HAL_OK)
{
Error_Handler();
}
/* Start the FDCAN module */
if (HAL_FDCAN_Start(&hfdcan1) != HAL_OK)
{
Error_Handler();
}
if (HAL_FDCAN_ActivateNotification(&hfdcan1, FDCAN_IT_RX_FIFO0_NEW_MESSAGE, 0) != HAL_OK)
{
Error_Handler();
}
/* Prepare Tx Header */
TxHeader.Identifier = 0x205;
TxHeader.IdType = FDCAN_STANDARD_ID;
TxHeader.TxFrameType = FDCAN_DATA_FRAME;
TxHeader.DataLength = FDCAN_DLC_BYTES_8;
TxHeader.ErrorStateIndicator = FDCAN_ESI_ACTIVE;
TxHeader.BitRateSwitch = FDCAN_BRS_OFF;
TxHeader.FDFormat = FDCAN_CLASSIC_CAN;
TxHeader.TxEventFifoControl = FDCAN_NO_TX_EVENTS;
TxHeader.MessageMarker = 0;
}
完成以上两个配置 只需要在Txbuffer里面填充数据就可以发送出去了
发送数据前 一定要确认好CAN PHY连接完好以及120Ohm电阻并联到上面 否则会出现各种问题!!!

使用CAN分析仪就可以接收到N6570发送的数据了 ID为0x205 8bit数据 |  微信公众号
微信公众号
 手机版
手机版