.png) STMCU小助手
发布时间:2021-12-9 11:21
STMCU小助手
发布时间:2021-12-9 11:21
|
定时器分类 G0系列有TIM1、TIM2、TIM3、TIM6、TIM7、TIM14、TIM15、TIM16、TIM17,它们区别如下图 其中TIM1为高级定时器;TIM2/3/14/15/16/17为通用定时器,TIM2支持32bit;TIM6/7为基本定时器 

计时器时序图 TIM1,TIM2,TIM3支持(中央对齐)向上向下模式,方向在向上向下时发生变化,减少对电机的噪声干扰。 

基本PWM模式,边缘或者中央对齐模式 
非对称PWM模式 
三相组合PWM模式 
可变频率pwm,由外部信号驱动。 逐周期控制的占空比。 

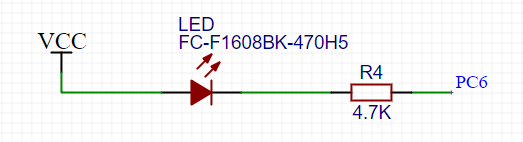
TIM2定时器实验 本次实验,我们选择TIM2定时器,通过设置预分频系数(PSC减去1)和计数器周期(ARR减去1)的数值,来控制整个定时器周期。让定时器周期进入中断,在中断函数中翻转PC6引脚电平,达到闪烁的目的。 如何计算定时器周期? 1、在时钟树中确定好TPCLK频率,这里已最大化频率运行; 
2、确定CK_CNT的值 ,CK_CNT=TPCLK / PSC,为了便于计算我们一般都是将CK_CNT的值化为整数, 如 64MHz / 6400=10000Hz 3、确定ARR的值,ARR=CK_CNT* t(s), 如要1秒周期,10000Hz*1s=10000。 实验代码 1、新建芯片工程,"SYS"打开"Serial Wire"调试接口,"RCC"中HSE使用"Crystal/Ceramic Resonator"; 2、在"Pinout view"中设置PC6为GPIO_Output,默认电平为low,开漏模式,不上下拉,速率为低 

3、设置时钟树,使用HSE、PLLCLK,HCLK为64,APB分频系数为1,APB时钟为64 
4、 设置TIM2,在TIM2选项卡中,"Clock Source"选择"Internal Clock" 5、下面"Counter Settings",Prescaler填入"6400-1",Counter Mode(计数模式)"Up",Counter Period填入"10000-1",其他参数默认值 如想要1秒周期,ARR=10000,PSC=TPCLK / CK_CNT 
6、在"NVIC"中,配置页面中找到"TIM2 global interrupt"使能,优先级选择"2" 
7、在Project Manager中填入项目名,IDE版本“MDK-ARM V5”,在Code Generator打上勾,生成代码。 
8、在main.c文件,int main函数里面,在代码MX_TIM2_Init()定时器初始化后面加上定时器中断初始化函数
9、定时器中断函数原型为void TIM2_IRQHandler(void),里面调用了HAL_TIM_IRQHandler(&htim2),该函数有很多个中断回调函数,我们这个定时器更新中断,找到我们需要的函数HAL_TIM_PeriodElapsedCallback(htim),需要手动写这个回调函数,把一下函数复制到main.c文件中
10、在int main(){}后面编写代码,编译,debug中勾上"Reset and Run"烧录固件,就能在开发板上看到输出闪烁。
|
实战经验 | ClassB功能安全认证代码与应用代码分区的实现要点
STM32G0 系列 I2C 通信异常典型案例分析与解决方案总结
经验分享 | LAT1490 两个STM32G0 I2C 通信异常的案例分析
经验分享 | STM32G0 I2C bootloader Go 命令后调试连接失败:DBG_SWEN 位复位修复
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
如何在STM32和Arduino上实现卷积神经网络
STM32与51单片机差异一文速览
STM32芯片命名规则
STM32 引脚到底有多少?为什么一个引脚能当好几个用?
 微信公众号
微信公众号
 手机版
手机版