以前就纠结过能不能一个定时器进行多路的输入捕获,因为毕竟输出四路的PWM是轻松随意的,当时大概想了一下觉得可能会比较麻烦就一直没去尝试,最近组里的同学做方波测频和测占空比遇到了问题,又提到了这个,今天仔细想了一下有了思路就写程序然后上板子试了一下,解决了这个问题。
首先我们先看单路的输入捕获是怎么实现的
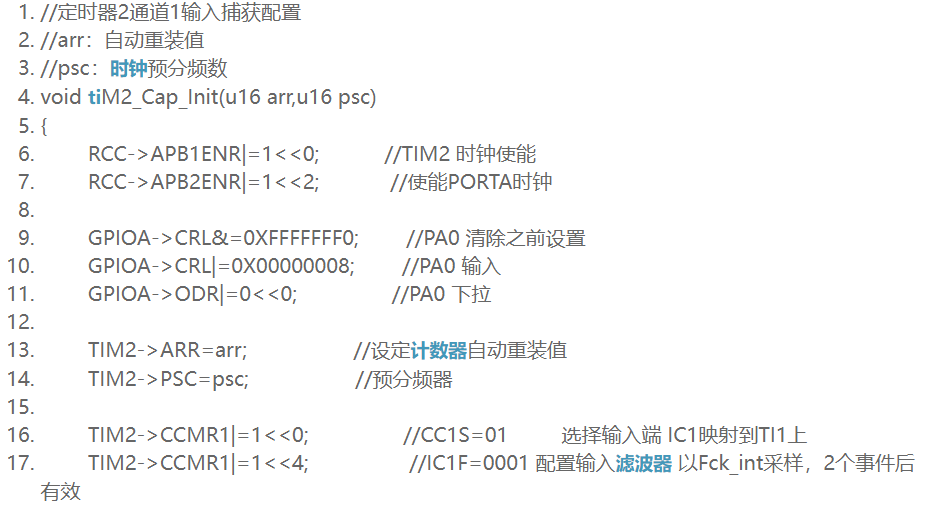
定时器的初始化函数:
- //定时器2通道1输入捕获配置
- //arr:自动重装值
- //psc:时钟预分频数
- void tiM2_Cap_Init(u16 arr,u16 psc)
- {
- RCC->APB1ENR|=1<<0; //TIM2 时钟使能
- RCC->APB2ENR|=1<<2; //使能PORTA时钟
- GPIOA->CRL&=0XFFFFFFF0; //PA0 清除之前设置
- GPIOA->CRL|=0X00000008; //PA0 输入
- GPIOA->ODR|=0<<0; //PA0 下拉
- TIM2->ARR=arr; //设定计数器自动重装值
- TIM2->PSC=psc; //预分频器
- TIM2->CCMR1|=1<<0; //CC1S=01 选择输入端 IC1映射到TI1上
- TIM2->CCMR1|=1<<4; //IC1F=0001 配置输入滤波器 以Fck_int采样,2个事件后有效
- TIM2->CCMR1|=0<<10; //IC2PS=00 配置输入分频,不分频
- TIM2->CCER|=0<<1; //CC1P=0 上升沿捕获
- TIM2->CCER|=1<<0; //CC1E=1 允许捕获计数器的值到捕获寄存器中
- TIM2->DIER|=1<<1; //允许捕获中断
- TIM2->DIER|=1<<0; //允许更新中断
- TIM2->CR1|=0x01; //使能定时器2
- MY_NVIC_Init(2,0,TIM2_IRQn,2);//抢占2,子优先级0,组2
- }
[color=rgb(51, 102, 153) !important]复制代码
输入捕获的中断函数:
- //捕获状态
- //[7]:0,没有成功的捕获;1,成功捕获到一次.
- //[6]:0,还没捕获到高电平;1,已经捕获到高电平了.
- //[5:0]:捕获高电平后溢出的次数
- u8 TIM2CH1_CAPTURE_STA=0; //输入捕获状态
- u16 TIM2CH1_CAPTURE_VAL; //输入捕获值
- //定时器2中断服务程序
- void TIM2_IRQHandler(void)
- {
- u16 tsr;
- tsr=TIM2->SR;
- IF((TIM2CH1_CAPTURE_STA&0X80)==0) //还未成功捕获
- {
- if(tsr&0X01)//溢出
- {
- if(TIM2CH1_CAPTURE_STA&0X40) //已经捕获到高电平了
- {
- if((TIM2CH1_CAPTURE_STA&0X3F)==0X3F) //高电平太长了
- {
- TIM2CH1_CAPTURE_STA|=0X80; //标记成功捕获了一次
- TIM2CH1_CAPTURE_VAL=0XFFFF;
- }else TIM2CH1_CAPTURE_STA++;
- }
- }
- if(tsr&0x02)//捕获1发生捕获事件
- {
- if(TIM2CH1_CAPTURE_STA&0X40) //捕获到一个下降沿
- {
- TIM2CH1_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽
- TIM2CH1_CAPTURE_VAL=TIM2->CCR1; //获取当前的捕获值.
- TIM2->CCER&=~(1<<1); //CC1P=0 设置为上升沿捕获
- }else //还未开始,第一次捕获上升沿
- {
- TIM2CH1_CAPTURE_VAL=0;
- TIM2CH1_CAPTURE_STA=0X40; //标记捕获到了上升沿
- TIM2->CNT=0; //计数器清空
- TIM2->CCER|=1<<1; //CC1P=1 设置为下降沿捕获
- }
- }
- }
- TIM2->SR=0;//清除中断标志位
- }
[color=rgb(51, 102, 153) !important]复制代码
主函数读取并显示:- int main(void)
- {
- u32 temp=0;
- STM32_clock_Init(9); //系统时钟设置
- uart_init(72,9600); //串口初始化为9600
- delay_init(72); //延时初始化
- LED_Init(); //初始化与LED连接的硬件接口
- TIM1_PWM_Init(899,36-1); //不分频。PWM频率=72000/(899+1)=80Khz
- TIM2_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数
- while(1)
- {
- delay_ms(10);
- LED0_PWM_VAL++;
- if(LED0_PWM_VAL==300)LED0_PWM_VAL=0;
- if(TIM2CH1_CAPTURE_STA&0X80)//成功捕获到了一次高电平
- {
- temp=TIM2CH1_CAPTURE_STA&0X3F;
- temp*=65536; //溢出时间总和
- temp+=TIM2CH1_CAPTURE_VAL; //得到总的高电平时间
- printf("HIGH:%d us\r\n",temp); //打印总的高点平时间
- TIM2CH1_CAPTURE_STA=0; //开启下一次捕获
- }
- }
- }
[color=rgb(51, 102, 153) !important]复制代码
具体的原理我就不细说了,如果不了解可以去找一下原子的教程,那里面讲得是很详细的,要实现四通道的输入捕获初始化是肯定要修改的,但是最为重要的是修改中断函数中的内容。
在单路输出中,中断的执行流程是,当新开始一次捕获并且捕获到高电平(就是上升沿),将TIM2->CNT寄存器置0,并且将捕获电平变为低电平(去捕获下降沿),表示新开始一次捕获,然后如果持续高电平使定时器溢出,TIMCH1_CAPTURE_STA会自增1,然后捕获到下降沿以后就完成了一次捕获,这时去读取当前CCR寄存器的值,然后在加上溢出次数*65536得到的就是整个高电平器件定时器总计数值,通过计算计数频率就可以得到高脉冲的时间。
四通道输入捕获原理
要实现四路的输入捕获如果每开始一次新的捕获就将CNT值置零是肯定不可以的,一个定时器只有一个CNT寄存器这样会是捕获完全混乱,所以,我的解决方法是:用一个变量Date1来存当开始一次新的捕获时CNT寄存器的值,然后中间步骤和单通道是完全相同的,完成捕获后将那时CCR寄存器的值写到Date2。计算总计数值就是溢出次数*65536+Date2-Date1
四路输入捕获初始化函数
注意:我这里将TIM2进行了部分重映射,在不进行重映射的情况下(PA0,PA1,PA2,PA3)通道四无法触发捕获中断)进行部分重映射(PA0,PA1,PB10,PB11)后就可以正常使用,我觉得可能是板子的问题
- //定时器2通道1-4输入捕获配置
- //arr:自动重装值
- //psc:时钟预分频数
- void TIM2_Cap_Init(u16 arr,u16 psc)
- {
- RCC->APB1ENR|=1<<0; //TIM2 时钟使能
- RCC->APB2ENR|=1<<2; //使能PORTA时钟
- RCC->APB2ENR|=1<<3; //使能PORTB时钟
- RCC->APB2ENR|=1<<0; //AFIO时钟使能
- AFIO->MAPR|=2<<8; //TIM2部分映射
- GPIOA->CRL&=0XFFFFFF00; //PA0,PA1清除之前设置
- GPIOA->CRL|=0X00000088; //PA0,PA1输入
- GPIOA->ODR|=0<<1; //PA0,PA1下拉
- GPIOB->CRH&=0xFFFF00FF; //PB10,PB11清除之前设置
- GPIOB->CRH|=0x00008800; //PB10,PB11输入
- GPIOB->ODR|=0<<11; //PB10,PB11下拉
- TIM2->ARR=arr; //设定计数器自动重装值
- TIM2->PSC=psc; //预分频器
- //CH1
- TIM2->CCMR1|=1<<0; //CC1S=01 选择输入端 IC1映射到TI1上
- TIM2->CCMR1|=1<<4; //IC1F=0001 配置输入滤波器 以Fck_int采样,2个事件后有效
- TIM2->CCMR1|=0<<2; //IC1PS=00 配置输入分频,不分频
- TIM2->CCER|=0<<1; //CC1P=0 上升沿捕获
- TIM2->CCER|=1<<0; //CC1E=1 允许捕获计数器的值到捕获寄存器中
- //CH2
- TIM2->CCMR1|=1<<8; //CC2S=01 选择输入端 IC1映射到TI1上
- TIM2->CCMR1|=1<<12; //IC2F=0001 配置输入滤波器 以Fck_int采样,2个事件后有效
- TIM2->CCMR1|=0<<10; //IC2PS=00 配置输入分频,不分频
- TIM2->CCER|=0<<5; //CC2P=0 上升沿捕获
- TIM2->CCER|=1<<4; //CC2E=1 允许捕获计数器的值到捕获寄存器中
- //CH3
- TIM2->CCMR2|=1<<0; //CC3S=01 选择输入端 IC1映射到TI1上
- TIM2->CCMR2|=1<<4; //IC3F=0001 配置输入滤波器 以Fck_int采样,2个事件后有效
- TIM2->CCMR2|=0<<2; //IC3PS=00 配置输入分频,不分频
- TIM2->CCER|=0<<9; //CC3P=0 上升沿捕获
- TIM2->CCER|=1<<8; //CC3E=1 允许捕获计数器的值到捕获寄存器中
- //CH4
- TIM2->CCMR2|=1<<8; //CC4S=01 选择输入端 IC1映射到TI1上
- TIM2->CCMR2|=1<<12; //IC4F=0001 配置输入滤波器 以Fck_int采样,2个事件后有效
- TIM2->CCMR2|=0<<10; //IC4PS=00 配置输入分频,不分频
- TIM2->CCER|=0<<13; //CC4P=0 上升沿捕获
- TIM2->CCER|=1<<12; //CC4E=1 允许捕获计数器的值到捕获寄存器中
- //中断使能
- TIM2->DIER|=1<<1; //允许捕获1中断
- TIM2->DIER|=1<<2; //允许捕获2中断
- TIM2->DIER|=1<<3; //允许捕获3中断
- TIM2->DIER|=1<<4; //允许捕获4中断
- TIM2->DIER|=1<<0; //允许更新中断
- TIM2->CR1|=0x01; //使能定时器2
- MY_NVIC_Init(2,0,TIM2_IRQn,2);//抢占2,子优先级0,组2
- }
[color=rgb(51, 102, 153) !important]复制代码
中断服务函数:<div id="code_RF7">- //捕获状态
- //[7]:0,没有成功的捕获;1,成功捕获到一次.
- //[6]:0,还没捕获到高电平;1,已经捕获到高电平了.
- //[5:0]:捕获高电平后溢出的次数
- //CH1
- u8 TIM2CH1_CAPTURE_STA=0; //输入捕获状态
- u16 TIM2CH1_CAPTURE_Date2; //数据2
- u16 TIM2CH1_CAPTURE_Date1; //数据1
- //CH2
- u8 TIM2CH2_CAPTURE_STA=0; //输入捕获状态
- u16 TIM2CH2_CAPTURE_Date2; //数据2
- u16 TIM2CH2_CAPTURE_Date1; //数据1
- //CH3
- u8 TIM2CH3_CAPTURE_STA=0; //输入捕获状态
- u16 TIM2CH3_CAPTURE_Date2; //数据2
- u16 TIM2CH3_CAPTURE_Date1; //数据1
- //CH4
- u8 TIM2CH4_CAPTURE_STA=0; //输入捕获状态
- u16 TIM2CH4_CAPTURE_Date2; //数据2
- u16 TIM2CH4_CAPTURE_Date1; //数据1
- //定时器2中断服务程序
- void TIM2_IRQHandler(void)
- {
- u16 tsr;
- tsr=TIM2->SR;
- //CH1中断处理
- if((TIM2CH1_CAPTURE_STA&0X80)==0)//还未成功捕获
- {
- if(tsr&0X01)//溢出
- {
- if(TIM2CH1_CAPTURE_STA&0X40)//已经捕获到高电平了
- {
- if((TIM2CH1_CAPTURE_STA&0X3F)==0X3F)//高电平太长了
- {
- TIM2CH1_CAPTURE_STA|=0X80;//标记成功捕获了一次
- TIM2CH1_CAPTURE_Date2=0XFFFF;
- }else TIM2CH1_CAPTURE_STA++;
- }
- }
- if(tsr&0x02)//捕获1发生捕获事件
- {
- if(TIM2CH1_CAPTURE_STA&0X40) //捕获到一个下降沿
- {
- TIM2CH1_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽
- TIM2CH1_CAPTURE_Date2=TIM2->CCR1; //获取当前的捕获值.
- TIM2->CCER&=~(1<<1); //CC1P=0 设置为上升沿捕获
- }else //还未开始,第一次捕获上升沿
- {
- TIM2CH1_CAPTURE_Date2=0;
- TIM2CH1_CAPTURE_STA=0X40; //标记捕获到了上升沿
- TIM2CH1_CAPTURE_Date1=TIM2->CCR1;
- TIM2->CCER|=1<<1; //CC1P=1 设置为下降沿捕获
- }
- }
- }
- //CH2中断处理
- if((TIM2CH2_CAPTURE_STA&0X80)==0)//还未成功捕获
- {
- if(tsr&0X01)//溢出
- {
- if(TIM2CH2_CAPTURE_STA&0X40)//已经捕获到高电平了
- {
- if((TIM2CH2_CAPTURE_STA&0X3F)==0X3F)//高电平太长了
- {
- TIM2CH2_CAPTURE_STA|=0X80;//标记成功捕获了一次
- TIM2CH2_CAPTURE_Date2=0XFFFF;
- }else TIM2CH2_CAPTURE_STA++;
- }
- }
- if(tsr&0x04)//捕获1发生捕获事件
- {
- if(TIM2CH2_CAPTURE_STA&0X40) //捕获到一个下降沿
- {
- TIM2CH2_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽
- TIM2CH2_CAPTURE_Date2=TIM2->CCR2; //获取当前的捕获值.
- TIM2->CCER&=~(1<<5); //CC1P=0 设置为上升沿捕获
- }else //还未开始,第一次捕获上升沿
- {
- TIM2CH2_CAPTURE_Date2=0;
- TIM2CH2_CAPTURE_STA=0X40; //标记捕获到了上升沿
- TIM2CH2_CAPTURE_Date1=TIM2->CCR2;
- TIM2->CCER|=1<<5; //CC1P=1 设置为下降沿捕获
- }
- }
- }
- //CH3中断处理
- if((TIM2CH3_CAPTURE_STA&0X80)==0)//还未成功捕获
- {
- if(tsr&0X01)//溢出
- {
- if(TIM2CH3_CAPTURE_STA&0X40)//已经捕获到高电平了
- {
- if((TIM2CH3_CAPTURE_STA&0X3F)==0X3F)//高电平太长了
- {
- TIM2CH3_CAPTURE_STA|=0X80;//标记成功捕获了一次
- TIM2CH3_CAPTURE_Date2=0XFFFF;
- }else TIM2CH3_CAPTURE_STA++;
- }
- }
- if(tsr&0x08)//捕获1发生捕获事件
- {
- if(TIM2CH3_CAPTURE_STA&0X40) //捕获到一个下降沿
- {
- TIM2CH3_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽
- TIM2CH3_CAPTURE_Date2=TIM2->CCR3; //获取当前的捕获值.
- TIM2->CCER&=~(1<<9); //CC1P=0 设置为上升沿捕获
- }else //还未开始,第一次捕获上升沿
- {
- TIM2CH3_CAPTURE_Date2=0;
- TIM2CH3_CAPTURE_STA=0X40; //标记捕获到了上升沿
- TIM2CH3_CAPTURE_Date1=TIM2->CCR3;
- TIM2->CCER|=1<<9; //CC1P=1 设置为下降沿捕获
- }
- }
- }
- //CH4中断处理
- if((TIM2CH4_CAPTURE_STA&0X80)==0)//还未成功捕获
- {
- if(tsr&0X01)//溢出
- {
- if(TIM2CH4_CAPTURE_STA&0X40)//已经捕获到高电平了
- {
- if((TIM2CH4_CAPTURE_STA&0X3F)==0X3F)//高电平太长了
- {
- TIM2CH4_CAPTURE_STA|=0X80;//标记成功捕获了一次
- TIM2CH4_CAPTURE_Date2=0XFFFF;
- }else TIM2CH4_CAPTURE_STA++;
- }
- }
- if(tsr&0x10)//捕获1发生捕获事件
- {
- if(TIM2CH4_CAPTURE_STA&0X40) //捕获到一个下降沿
- {
- TIM2CH4_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽
- TIM2CH4_CAPTURE_Date2=TIM2->CCR4; //获取当前的捕获值.
- TIM2->CCER&=~(1<<13); //CC1P=0 设置为上升沿捕获
- }else //还未开始,第一次捕获上升沿
- {
- TIM2CH4_CAPTURE_Date2=0;
- TIM2CH4_CAPTURE_STA=0X40; //标记捕获到了上升沿
- TIM2CH4_CAPTURE_Date1=TIM2->CCR4;
- TIM2->CCER|=1<<13; //CC1P=1 设置为下降沿捕获
- }
- }
- }
- TIM2->SR=0;//清除中断标志位
- }
[color=rgb(51, 102, 153) !important]复制代码
主函数(显示四路信号高点平的时间):- int main(void)
- {
- u32 temp1=0,temp2=0,temp3=0,temp4=0;
- Stm32_Clock_Init(9); //初始化系统时钟
- delay_init(72); //初始化延时
- uart_init(72,115200); //串口初始化
- TIM1_PWM_Init(1000-1,36-1); //不分频。PWM频率=72000/(899+1)=80Khz
- TIM2_Cap_Init(0XFFFF,72-1); //以2Mhz的频率计数
- LED_Init();
- TIM1_CH1_PWM_VAL=100;
- while(1)
- {
- if(TIM2CH1_CAPTURE_STA&0X80) //成功捕获到了一次高电平
- {
- temp1=TIM2CH1_CAPTURE_STA&0X3F;
- temp1*=65536; //溢出时间总和
- temp1+=TIM2CH1_CAPTURE_Date2;
- temp1-=TIM2CH1_CAPTURE_Date1; //得到总的高电平时间
- printf("TIM2_CH1_HIGH:%d us\r\n",temp1); //打印总的高点平时间
- TIM2CH1_CAPTURE_Date1=0;
- TIM2CH1_CAPTURE_STA=0; //开启下一次捕获
- }
- if(TIM2CH2_CAPTURE_STA&0X80) //成功捕获到了一次高电平
- {
- temp2=TIM2CH2_CAPTURE_STA&0X3F;
- temp2*=65536; //溢出时间总和
- temp2+=TIM2CH2_CAPTURE_Date2;
- temp2-=TIM2CH2_CAPTURE_Date1; //得到总的高电平时间
- printf("TIM2_CH2_HIGH:%d us\r\n",temp2); //打印总的高点平时间
- TIM2CH2_CAPTURE_Date1=0;
- TIM2CH2_CAPTURE_STA=0; //开启下一次捕获
- }
- if(TIM2CH3_CAPTURE_STA&0X80) //成功捕获到了一次高电平
- {
- temp3=TIM2CH3_CAPTURE_STA&0X3F;
- temp3*=65536; //溢出时间总和
- temp3+=TIM2CH3_CAPTURE_Date2;
- temp3-=TIM2CH3_CAPTURE_Date1; //得到总的高电平时间
- printf("TIM2_CH3_HIGH:%d us\r\n",temp3); //打印总的高点平时间
- TIM2CH3_CAPTURE_Date1=0;
- TIM2CH3_CAPTURE_STA=0; //开启下一次捕获
- }
- if(TIM2CH4_CAPTURE_STA&0X80) //成功捕获到了一次高电平
- {
- temp4=TIM2CH4_CAPTURE_STA&0X3F;
- temp4*=65536; //溢出时间总和
- temp4+=TIM2CH4_CAPTURE_Date2;
- temp4-=TIM2CH4_CAPTURE_Date1; //得到总的高电平时间
- printf("TIM2_CH4_HIGH:%d us\r\n",temp4); //打印总的高点平时间
- TIM2CH4_CAPTURE_Date1=0;
- TIM2CH4_CAPTURE_STA=0; //开启下一次捕获
- }
- printf("\r\n");
- LED=!LED;
- delay_ms(10);
- }
- }
|
.png) STMCU小助手
发布时间:2022-1-12 21:00
STMCU小助手
发布时间:2022-1-12 21:00
 微信公众号
微信公众号
 手机版
手机版