本帖最后由 XinLiYF 于 2018-4-22 21:59 编辑
通用 RTOS 接口
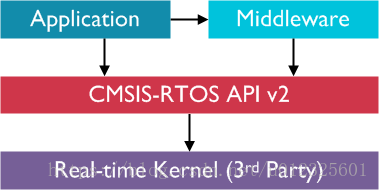
CMSIS-RTOS2 是一个通用的 API ,不受底层 RTOS 内核的影响。应用程序员在用户代码中调用 CMSIS-RTOS2 API 函数以确保从一个 RTOS 到另一个 RTOS 的最大可移植性。使用 CMSIS-RTOS2 API 的中间件可以避免不必要的移植工作。
CMSIS-RTOS API 结构
典型的 CMSIS-RTOS2 API 实现与现有的实时内核接口。CMSIS-RTOS2 API 提供以下属性和功能:
- 函数名称,标识符和参数是描述性的,易于理解的。这些功能强大而灵活,减少了暴露给用户的功能数量。
- 线程管理允许您定义,创建和控制线程。
- 中断服务程序(ISR)可以调用一些 CMSIS-RTOS 功能。 当 CMSIS-RTOS 函数不能从 ISR 上下文中调用时,它会拒绝调用并返回错误代码。
- 三种不同的事件类型支持多个线程和/或 ISR 之间的通信:
- 线程标志: 可用于向线程指示特定条件。
- 事件标志: 可用于向线程或 ISR 指示事件。
- 消息: 可以发送到线程或 ISR 。消息缓冲在队列中。
- 互斥管理和信号量已合并。
- CPU 时间可以安排以下功能:
- 超时参数包含在许多 CMSIS-RTOS 功能中,以避免系统锁定。当指定超时时,系统会等待,直到资源可用或发生事件。在等待时,运行其他线程。
- osDelay 和 osDelayUntil 函数将线程置于 WAITING 状态一段指定的时间。
- osThreadYield 提供协作式线程切换并将执行传递给具有相同优先级的另一个线程。
- 定时器管理功能用于触发功能的执行。
CMSIS-RTOS2 API 旨在通过 Cortex-M 存储器保护单元(MPU)选择性地整合多处理器系统和/或访问保护。
在一些 RTOS 实现中,线程可能在不同的处理器上执行,因此消息队列可能驻留在共享内存资源中。
CMSIS-RTOS2 API 鼓励软件行业发展现有的 RTOS 实施。实时操作系统的实现可以在针对 Cortex-M 处理器的不同方面进行不同的优化。可选功能可能是例如
- 支持 Cortex-M 内存保护单元(MPU)。
- 支持多处理器系统。
- 支持 DMA 控制器。
- 确定性上下文切换。
- 循环上下文切换。
- 避免死锁,例如优先倒置。
- 通过使用 Armv7-M 指令 LDREX 和 STREX 来实现零中断延迟。
使用 CMSIS-RTOS2 实现
CMSIS-RTOS2 实现通常作为库提供。要将 RTOS 功能添加到现有的基于 CMSIS 的应用程序中,需要添加 RTOS 库(通常是一个或多个配置文件)。有一个新的头文件 cmsis_os2.h 可用。这是完全可移植应用程序所需的唯一头文件。在这种情况下,不能使用用户为控制块,对象数据和线程堆栈提供的内存。或者,您可以包含一个实现特定的头文件(例如 rtx_os.h),该文件还提供了用于资源分配的定义(例如控制块的大小,对象数据和线程堆栈所需的内存)。 这是可选的,意味着应用程序代码不是完全可移植的。
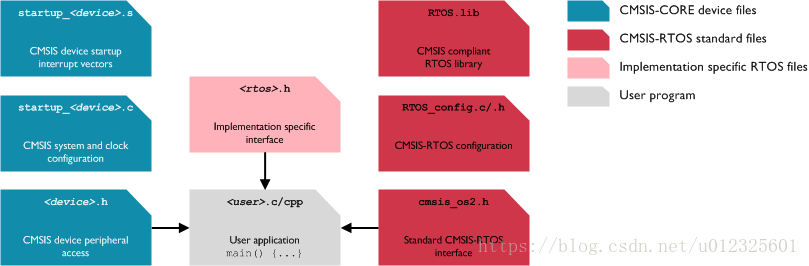
CMSIS-RTOS 文件结构
将文件添加到项目后,用户可以开始使用 CMSIS-RTOS 功能。下面提供了一个代码示例:
代码示例 - /*----------------------------------------------------------------------------
- * CMSIS-RTOS 'main' function template
- *---------------------------------------------------------------------------*/
-
- #include "RTE_Components.h"
- #include CMSIS_device_header
- #include "cmsis_os2.h"
-
- /*----------------------------------------------------------------------------
- * Application main thread
- *---------------------------------------------------------------------------*/
- void app_main (void *argument) {
-
- // ...
- for (;;) {}
- }
-
- int main (void) {
-
- // System Initialization
- SystemCoreClockUpdate();
- #ifdef RTE_Compiler_EventRecorder
- // Initialize and start Event Recorder
- EventRecorderInitialize(EventRecordError, 1U);
- #endif
- // ...
-
- osKernelInitialize(); // Initialize CMSIS-RTOS
- osThreadNew(app_main, NULL, NULL); // Create application main thread
- osKernelStart(); // Start thread execution
- for (;;) {}
- }
cmsis_os2.h 头文件
文件 cmsis_os2.h 是一个标准头文件,与每个 CMSIS-RTOS2 兼容的实时操作系统(RTOS)相连接。每个实现都提供了相同的 cmsis_os2.h ,它定义了到 CMSIS-RTOS2 的接口。
通过使用 cmsis_os2.h 和动态对象分配,可以创建在不同的 CMSIS-RTOS2 实现上使用时不需要修改的源代码或库。
头文件 cmsis_os2.h - /*
- * Copyright (c) 2013-2017 ARM Limited. All rights reserved.
- *
- * SPDX-License-Identifier: Apache-2.0
- *
- * Licensed under the Apache License, Version 2.0 (the License); you may
- * not use this file except in compliance with the License.
- * You may obtain a copy of the License at
- *
- * www.apache.org/licenses/LICENSE-2.0
- *
- * Unless required by applicable law or agreed to in writing, software
- * distributed under the License is distributed on an AS IS BASIS, WITHOUT
- * WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
- * See the License for the specific language governing permissions and
- * limitations under the License.
- *
- * ----------------------------------------------------------------------
- *
- * $Date: 30. October 2017
- * $Revision: V2.1.2
- *
- * Project: CMSIS-RTOS2 API
- * Title: cmsis_os2.h header file
- *
- * Version 2.1.2
- * Additional functions allowed to be called from Interrupt Service Routines:
- * - osKernelGetInfo, osKernelGetState
- * Version 2.1.1
- * Additional functions allowed to be called from Interrupt Service Routines:
- * - osKernelGetTickCount, osKernelGetTickFreq
- * Changed Kernel Tick type to uint32_t:
- * - updated: osKernelGetTickCount, osDelayUntil
- * Version 2.1.0
- * Support for critical and uncritical sections (nesting safe):
- * - updated: osKernelLock, osKernelUnlock
- * - added: osKernelRestoreLock
- * Updated Thread and Event Flags:
- * - changed flags parameter and return type from int32_t to uint32_t
- * Version 2.0.0
- * Initial Release
- *---------------------------------------------------------------------------*/
-
- #ifndef CMSIS_OS2_H_
- #define CMSIS_OS2_H_
-
- #ifndef __NO_RETURN
- #if defined(__CC_ARM)
- #define __NO_RETURN __declspec(noreturn)
- #elif defined(__ARMCC_VERSION) && (__ARMCC_VERSION >= 6010050)
- #define __NO_RETURN __attribute__((__noreturn__))
- #elif defined(__GNUC__)
- #define __NO_RETURN __attribute__((__noreturn__))
- #elif defined(__ICCARM__)
- #define __NO_RETURN __noreturn
- #else
- #define __NO_RETURN
- #endif
- #endif
-
- #include <stdint.h>
- #include <stddef.h>
-
- #ifdef __cplusplus
- extern "C"
- {
- #endif
-
-
- // ==== Enumerations, structures, defines ====
-
- /// Version information.
- typedef struct {
- uint32_t api; ///< API version (major.minor.rev: mmnnnrrrr dec).
- uint32_t kernel; ///< Kernel version (major.minor.rev: mmnnnrrrr dec).
- } osVersion_t;
-
- /// Kernel state.
- typedef enum {
- osKernelInactive = 0, ///< Inactive.
- osKernelReady = 1, ///< Ready.
- osKernelRunning = 2, ///< Running.
- osKernelLocked = 3, ///< Locked.
- osKernelSuspended = 4, ///< Suspended.
- osKernelError = -1, ///< Error.
- osKernelReserved = 0x7FFFFFFFU ///< Prevents enum down-size compiler optimization.
- } osKernelState_t;
-
- /// Thread state.
- typedef enum {
- osThreadInactive = 0, ///< Inactive.
- osThreadReady = 1, ///< Ready.
- osThreadRunning = 2, ///< Running.
- osThreadBlocked = 3, ///< Blocked.
- osThreadTerminated = 4, ///< Terminated.
- osThreadError = -1, ///< Error.
- osThreadReserved = 0x7FFFFFFF ///< Prevents enum down-size compiler optimization.
- } osThreadState_t;
-
- /// Priority values.
- typedef enum {
- osPriorityNone = 0, ///< No priority (not initialized).
- osPriorityIdle = 1, ///< Reserved for Idle thread.
- osPriorityLow = 8, ///< Priority: low
- osPriorityLow1 = 8+1, ///< Priority: low + 1
- osPriorityLow2 = 8+2, ///< Priority: low + 2
- osPriorityLow3 = 8+3, ///< Priority: low + 3
- osPriorityLow4 = 8+4, ///< Priority: low + 4
- osPriorityLow5 = 8+5, ///< Priority: low + 5
- osPriorityLow6 = 8+6, ///< Priority: low + 6
- osPriorityLow7 = 8+7, ///< Priority: low + 7
- osPriorityBelowNormal = 16, ///< Priority: below normal
- osPriorityBelowNormal1 = 16+1, ///< Priority: below normal + 1
- osPriorityBelowNormal2 = 16+2, ///< Priority: below normal + 2
- osPriorityBelowNormal3 = 16+3, ///< Priority: below normal + 3
- osPriorityBelowNormal4 = 16+4, ///< Priority: below normal + 4
- osPriorityBelowNormal5 = 16+5, ///< Priority: below normal + 5
- osPriorityBelowNormal6 = 16+6, ///< Priority: below normal + 6
- osPriorityBelowNormal7 = 16+7, ///< Priority: below normal + 7
- osPriorityNormal = 24, ///< Priority: normal
- osPriorityNormal1 = 24+1, ///< Priority: normal + 1
- osPriorityNormal2 = 24+2, ///< Priority: normal + 2
- osPriorityNormal3 = 24+3, ///< Priority: normal + 3
- osPriorityNormal4 = 24+4, ///< Priority: normal + 4
- osPriorityNormal5 = 24+5, ///< Priority: normal + 5
- osPriorityNormal6 = 24+6, ///< Priority: normal + 6
- osPriorityNormal7 = 24+7, ///< Priority: normal + 7
- osPriorityAboveNormal = 32, ///< Priority: above normal
- osPriorityAboveNormal1 = 32+1, ///< Priority: above normal + 1
- osPriorityAboveNormal2 = 32+2, ///< Priority: above normal + 2
- osPriorityAboveNormal3 = 32+3, ///< Priority: above normal + 3
- osPriorityAboveNormal4 = 32+4, ///< Priority: above normal + 4
- osPriorityAboveNormal5 = 32+5, ///< Priority: above normal + 5
- osPriorityAboveNormal6 = 32+6, ///< Priority: above normal + 6
- osPriorityAboveNormal7 = 32+7, ///< Priority: above normal + 7
- osPriorityHigh = 40, ///< Priority: high
- osPriorityHigh1 = 40+1, ///< Priority: high + 1
- osPriorityHigh2 = 40+2, ///< Priority: high + 2
- osPriorityHigh3 = 40+3, ///< Priority: high + 3
- osPriorityHigh4 = 40+4, ///< Priority: high + 4
- osPriorityHigh5 = 40+5, ///< Priority: high + 5
- osPriorityHigh6 = 40+6, ///< Priority: high + 6
- osPriorityHigh7 = 40+7, ///< Priority: high + 7
- osPriorityRealtime = 48, ///< Priority: realtime
- osPriorityRealtime1 = 48+1, ///< Priority: realtime + 1
- osPriorityRealtime2 = 48+2, ///< Priority: realtime + 2
- osPriorityRealtime3 = 48+3, ///< Priority: realtime + 3
- osPriorityRealtime4 = 48+4, ///< Priority: realtime + 4
- osPriorityRealtime5 = 48+5, ///< Priority: realtime + 5
- osPriorityRealtime6 = 48+6, ///< Priority: realtime + 6
- osPriorityRealtime7 = 48+7, ///< Priority: realtime + 7
- osPriorityISR = 56, ///< Reserved for ISR deferred thread.
- osPriorityError = -1, ///< System cannot determine priority or illegal priority.
- osPriorityReserved = 0x7FFFFFFF ///< Prevents enum down-size compiler optimization.
- } osPriority_t;
-
- /// Entry point of a thread.
- typedef void (*osThreadFunc_t) (void *argument);
-
- /// Timer callback function.
- typedef void (*osTimerFunc_t) (void *argument);
-
- /// Timer type.
- typedef enum {
- osTimerOnce = 0, ///< One-shot timer.
- osTimerPeriodic = 1 ///< Repeating timer.
- } osTimerType_t;
-
- // Timeout value.
- #define osWaitForever 0xFFFFFFFFU ///< Wait forever timeout value.
-
- // Flags options (\ref osThreadFlagsWait and \ref osEventFlagsWait).
- #define osFlagsWaitAny 0x00000000U ///< Wait for any flag (default).
- #define osFlagsWaitAll 0x00000001U ///< Wait for all flags.
- #define osFlagsNoClear 0x00000002U ///< Do not clear flags which have been specified to wait for.
-
- // Flags errors (returned by osThreadFlagsXxxx and osEventFlagsXxxx).
- #define osFlagsError 0x80000000U ///< Error indicator.
- #define osFlagsErrorUnknown 0xFFFFFFFFU ///< osError (-1).
- #define osFlagsErrorTimeout 0xFFFFFFFEU ///< osErrorTimeout (-2).
- #define osFlagsErrorResource 0xFFFFFFFDU ///< osErrorResource (-3).
- #define osFlagsErrorParameter 0xFFFFFFFCU ///< osErrorParameter (-4).
- #define osFlagsErrorISR 0xFFFFFFFAU ///< osErrorISR (-6).
-
- // Thread attributes (attr_bits in \ref osThreadAttr_t).
- #define osThreadDetached 0x00000000U ///< Thread created in detached mode (default)
- #define osThreadJoinable 0x00000001U ///< Thread created in joinable mode
-
- // Mutex attributes (attr_bits in \ref osMutexAttr_t).
- #define osMutexRecursive 0x00000001U ///< Recursive mutex.
- #define osMutexPrioInherit 0x00000002U ///< Priority inherit protocol.
- #define osMutexRobust 0x00000008U ///< Robust mutex.
-
- /// Status code values returned by CMSIS-RTOS functions.
- typedef enum {
- osOK = 0, ///< Operation completed successfully.
- osError = -1, ///< Unspecified RTOS error: run-time error but no other error message fits.
- osErrorTimeout = -2, ///< Operation not completed within the timeout period.
- osErrorResource = -3, ///< Resource not available.
- osErrorParameter = -4, ///< Parameter error.
- osErrorNoMemory = -5, ///< System is out of memory: it was impossible to allocate or reserve memory for the operation.
- osErrorISR = -6, ///< Not allowed in ISR context: the function cannot be called from interrupt service routines.
- osStatusReserved = 0x7FFFFFFF ///< Prevents enum down-size compiler optimization.
- } osStatus_t;
-
-
- /// \details Thread ID identifies the thread.
- typedef void *osThreadId_t;
-
- /// \details Timer ID identifies the timer.
- typedef void *osTimerId_t;
-
- /// \details Event Flags ID identifies the event flags.
- typedef void *osEventFlagsId_t;
-
- /// \details Mutex ID identifies the mutex.
- typedef void *osMutexId_t;
-
- /// \details Semaphore ID identifies the semaphore.
- typedef void *osSemaphoreId_t;
-
- /// \details Memory Pool ID identifies the memory pool.
- typedef void *osMemoryPoolId_t;
-
- /// \details Message Queue ID identifies the message queue.
- typedef void *osMessageQueueId_t;
-
-
- #ifndef TZ_MODULEID_T
- #define TZ_MODULEID_T
- /// \details Data type that identifies secure software modules called by a process.
- typedef uint32_t TZ_ModuleId_t;
- #endif
-
-
- /// Attributes structure for thread.
- typedef struct {
- const char *name; ///< name of the thread
- uint32_t attr_bits; ///< attribute bits
- void *cb_mem; ///< memory for control block
- uint32_t cb_size; ///< size of provided memory for control block
- void *stack_mem; ///< memory for stack
- uint32_t stack_size; ///< size of stack
- osPriority_t priority; ///< initial thread priority (default: osPriorityNormal)
- TZ_ModuleId_t tz_module; ///< TrustZone module identifier
- uint32_t reserved; ///< reserved (must be 0)
- } osThreadAttr_t;
-
- /// Attributes structure for timer.
- typedef struct {
- const char *name; ///< name of the timer
- uint32_t attr_bits; ///< attribute bits
- void *cb_mem; ///< memory for control block
- uint32_t cb_size; ///< size of provided memory for control block
- } osTimerAttr_t;
-
- /// Attributes structure for event flags.
- typedef struct {
- const char *name; ///< name of the event flags
- uint32_t attr_bits; ///< attribute bits
- void *cb_mem; ///< memory for control block
- uint32_t cb_size; ///< size of provided memory for control block
- } osEventFlagsAttr_t;
-
- /// Attributes structure for mutex.
- typedef struct {
- const char *name; ///< name of the mutex
- uint32_t attr_bits; ///< attribute bits
- void *cb_mem; ///< memory for control block
- uint32_t cb_size; ///< size of provided memory for control block
- } osMutexAttr_t;
-
- /// Attributes structure for semaphore.
- typedef struct {
- const char *name; ///< name of the semaphore
- uint32_t attr_bits; ///< attribute bits
- void *cb_mem; ///< memory for control block
- uint32_t cb_size; ///< size of provided memory for control block
- } osSemaphoreAttr_t;
-
- /// Attributes structure for memory pool.
- typedef struct {
- const char *name; ///< name of the memory pool
- uint32_t attr_bits; ///< attribute bits
- void *cb_mem; ///< memory for control block
- uint32_t cb_size; ///< size of provided memory for control block
- void *mp_mem; ///< memory for data storage
- uint32_t mp_size; ///< size of provided memory for data storage
- } osMemoryPoolAttr_t;
-
- /// Attributes structure for message queue.
- typedef struct {
- const char *name; ///< name of the message queue
- uint32_t attr_bits; ///< attribute bits
- void *cb_mem; ///< memory for control block
- uint32_t cb_size; ///< size of provided memory for control block
- void *mq_mem; ///< memory for data storage
- uint32_t mq_size; ///< size of provided memory for data storage
- } osMessageQueueAttr_t;
-
-
- // ==== Kernel Management Functions ====
-
- /// Initialize the RTOS Kernel.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osKernelInitialize (void);
-
- /// Get RTOS Kernel Information.
- /// \param[out] version pointer to buffer for retrieving version information.
- /// \param[out] id_buf pointer to buffer for retrieving kernel identification string.
- /// \param[in] id_size size of buffer for kernel identification string.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osKernelGetInfo (osVersion_t *version, char *id_buf, uint32_t id_size);
-
- /// Get the current RTOS Kernel state.
- /// \return current RTOS Kernel state.
- osKernelState_t osKernelGetState (void);
-
- /// Start the RTOS Kernel scheduler.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osKernelStart (void);
-
- /// Lock the RTOS Kernel scheduler.
- /// \return previous lock state (1 - locked, 0 - not locked, error code if negative).
- int32_t osKernelLock (void);
-
- /// Unlock the RTOS Kernel scheduler.
- /// \return previous lock state (1 - locked, 0 - not locked, error code if negative).
- int32_t osKernelUnlock (void);
-
- /// Restore the RTOS Kernel scheduler lock state.
- /// \param[in] lock lock state obtained by \ref osKernelLock or \ref osKernelUnlock.
- /// \return new lock state (1 - locked, 0 - not locked, error code if negative).
- int32_t osKernelRestoreLock (int32_t lock);
-
- /// Suspend the RTOS Kernel scheduler.
- /// \return time in ticks, for how long the system can sleep or power-down.
- uint32_t osKernelSuspend (void);
-
- /// Resume the RTOS Kernel scheduler.
- /// \param[in] sleep_ticks time in ticks for how long the system was in sleep or power-down mode.
- void osKernelResume (uint32_t sleep_ticks);
-
- /// Get the RTOS kernel tick count.
- /// \return RTOS kernel current tick count.
- uint32_t osKernelGetTickCount (void);
-
- /// Get the RTOS kernel tick frequency.
- /// \return frequency of the kernel tick in hertz, i.e. kernel ticks per second.
- uint32_t osKernelGetTickFreq (void);
-
- /// Get the RTOS kernel system timer count.
- /// \return RTOS kernel current system timer count as 32-bit value.
- uint32_t osKernelGetSysTimerCount (void);
-
- /// Get the RTOS kernel system timer frequency.
- /// \return frequency of the system timer in hertz, i.e. timer ticks per second.
- uint32_t osKernelGetSysTimerFreq (void);
-
-
- // ==== Thread Management Functions ====
-
- /// Create a thread and add it to Active Threads.
- /// \param[in] func thread function.
- /// \param[in] argument pointer that is passed to the thread function as start argument.
- /// \param[in] attr thread attributes; NULL: default values.
- /// \return thread ID for reference by other functions or NULL in case of error.
- osThreadId_t osThreadNew (osThreadFunc_t func, void *argument, const osThreadAttr_t *attr);
-
- /// Get name of a thread.
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \return name as NULL terminated string.
- const char *osThreadGetName (osThreadId_t thread_id);
-
- /// Return the thread ID of the current running thread.
- /// \return thread ID for reference by other functions or NULL in case of error.
- osThreadId_t osThreadGetId (void);
-
- /// Get current thread state of a thread.
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \return current thread state of the specified thread.
- osThreadState_t osThreadGetState (osThreadId_t thread_id);
-
- /// Get stack size of a thread.
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \return stack size in bytes.
- uint32_t osThreadGetStackSize (osThreadId_t thread_id);
-
- /// Get available stack space of a thread based on stack watermark recording during execution.
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \return remaining stack space in bytes.
- uint32_t osThreadGetStackSpace (osThreadId_t thread_id);
-
- /// Change priority of a thread.
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \param[in] priority new priority value for the thread function.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osThreadSetPriority (osThreadId_t thread_id, osPriority_t priority);
-
- /// Get current priority of a thread.
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \return current priority value of the specified thread.
- osPriority_t osThreadGetPriority (osThreadId_t thread_id);
-
- /// Pass control to next thread that is in state \b READY.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osThreadYield (void);
-
- /// Suspend execution of a thread.
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osThreadSuspend (osThreadId_t thread_id);
-
- /// Resume execution of a thread.
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osThreadResume (osThreadId_t thread_id);
-
- /// Detach a thread (thread storage can be reclaimed when thread terminates).
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osThreadDetach (osThreadId_t thread_id);
-
- /// Wait for specified thread to terminate.
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osThreadJoin (osThreadId_t thread_id);
-
- /// Terminate execution of current running thread.
- __NO_RETURN void osThreadExit (void);
-
- /// Terminate execution of a thread.
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osThreadTerminate (osThreadId_t thread_id);
-
- /// Get number of active threads.
- /// \return number of active threads.
- uint32_t osThreadGetCount (void);
-
- /// Enumerate active threads.
- /// \param[out] thread_array pointer to array for retrieving thread IDs.
- /// \param[in] array_items maximum number of items in array for retrieving thread IDs.
- /// \return number of enumerated threads.
- uint32_t osThreadEnumerate (osThreadId_t *thread_array, uint32_t array_items);
-
-
- // ==== Thread Flags Functions ====
-
- /// Set the specified Thread Flags of a thread.
- /// \param[in] thread_id thread ID obtained by \ref osThreadNew or \ref osThreadGetId.
- /// \param[in] flags specifies the flags of the thread that shall be set.
- /// \return thread flags after setting or error code if highest bit set.
- uint32_t osThreadFlagsSet (osThreadId_t thread_id, uint32_t flags);
-
- /// Clear the specified Thread Flags of current running thread.
- /// \param[in] flags specifies the flags of the thread that shall be cleared.
- /// \return thread flags before clearing or error code if highest bit set.
- uint32_t osThreadFlagsClear (uint32_t flags);
-
- /// Get the current Thread Flags of current running thread.
- /// \return current thread flags.
- uint32_t osThreadFlagsGet (void);
-
- /// Wait for one or more Thread Flags of the current running thread to become signaled.
- /// \param[in] flags specifies the flags to wait for.
- /// \param[in] options specifies flags options (osFlagsXxxx).
- /// \param[in] timeout \ref CMSIS_RTOS_TimeOutValue or 0 in case of no time-out.
- /// \return thread flags before clearing or error code if highest bit set.
- uint32_t osThreadFlagsWait (uint32_t flags, uint32_t options, uint32_t timeout);
-
-
- // ==== Generic Wait Functions ====
-
- /// Wait for Timeout (Time Delay).
- /// \param[in] ticks \ref CMSIS_RTOS_TimeOutValue "time ticks" value
- /// \return status code that indicates the execution status of the function.
- osStatus_t osDelay (uint32_t ticks);
-
- /// Wait until specified time.
- /// \param[in] ticks absolute time in ticks
- /// \return status code that indicates the execution status of the function.
- osStatus_t osDelayUntil (uint32_t ticks);
-
-
- // ==== Timer Management Functions ====
-
- /// Create and Initialize a timer.
- /// \param[in] func function pointer to callback function.
- /// \param[in] type \ref osTimerOnce for one-shot or \ref osTimerPeriodic for periodic behavior.
- /// \param[in] argument argument to the timer callback function.
- /// \param[in] attr timer attributes; NULL: default values.
- /// \return timer ID for reference by other functions or NULL in case of error.
- osTimerId_t osTimerNew (osTimerFunc_t func, osTimerType_t type, void *argument, const osTimerAttr_t *attr);
-
- /// Get name of a timer.
- /// \param[in] timer_id timer ID obtained by \ref osTimerNew.
- /// \return name as NULL terminated string.
- const char *osTimerGetName (osTimerId_t timer_id);
-
- /// Start or restart a timer.
- /// \param[in] timer_id timer ID obtained by \ref osTimerNew.
- /// \param[in] ticks \ref CMSIS_RTOS_TimeOutValue "time ticks" value of the timer.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osTimerStart (osTimerId_t timer_id, uint32_t ticks);
-
- /// Stop a timer.
- /// \param[in] timer_id timer ID obtained by \ref osTimerNew.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osTimerStop (osTimerId_t timer_id);
-
- /// Check if a timer is running.
- /// \param[in] timer_id timer ID obtained by \ref osTimerNew.
- /// \return 0 not running, 1 running.
- uint32_t osTimerIsRunning (osTimerId_t timer_id);
-
- /// Delete a timer.
- /// \param[in] timer_id timer ID obtained by \ref osTimerNew.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osTimerDelete (osTimerId_t timer_id);
-
-
- // ==== Event Flags Management Functions ====
-
- /// Create and Initialize an Event Flags object.
- /// \param[in] attr event flags attributes; NULL: default values.
- /// \return event flags ID for reference by other functions or NULL in case of error.
- osEventFlagsId_t osEventFlagsNew (const osEventFlagsAttr_t *attr);
-
- /// Get name of an Event Flags object.
- /// \param[in] ef_id event flags ID obtained by \ref osEventFlagsNew.
- /// \return name as NULL terminated string.
- const char *osEventFlagsGetName (osEventFlagsId_t ef_id);
-
- /// Set the specified Event Flags.
- /// \param[in] ef_id event flags ID obtained by \ref osEventFlagsNew.
- /// \param[in] flags specifies the flags that shall be set.
- /// \return event flags after setting or error code if highest bit set.
- uint32_t osEventFlagsSet (osEventFlagsId_t ef_id, uint32_t flags);
-
- /// Clear the specified Event Flags.
- /// \param[in] ef_id event flags ID obtained by \ref osEventFlagsNew.
- /// \param[in] flags specifies the flags that shall be cleared.
- /// \return event flags before clearing or error code if highest bit set.
- uint32_t osEventFlagsClear (osEventFlagsId_t ef_id, uint32_t flags);
-
- /// Get the current Event Flags.
- /// \param[in] ef_id event flags ID obtained by \ref osEventFlagsNew.
- /// \return current event flags.
- uint32_t osEventFlagsGet (osEventFlagsId_t ef_id);
-
- /// Wait for one or more Event Flags to become signaled.
- /// \param[in] ef_id event flags ID obtained by \ref osEventFlagsNew.
- /// \param[in] flags specifies the flags to wait for.
- /// \param[in] options specifies flags options (osFlagsXxxx).
- /// \param[in] timeout \ref CMSIS_RTOS_TimeOutValue or 0 in case of no time-out.
- /// \return event flags before clearing or error code if highest bit set.
- uint32_t osEventFlagsWait (osEventFlagsId_t ef_id, uint32_t flags, uint32_t options, uint32_t timeout);
-
- /// Delete an Event Flags object.
- /// \param[in] ef_id event flags ID obtained by \ref osEventFlagsNew.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osEventFlagsDelete (osEventFlagsId_t ef_id);
-
-
- // ==== Mutex Management Functions ====
-
- /// Create and Initialize a Mutex object.
- /// \param[in] attr mutex attributes; NULL: default values.
- /// \return mutex ID for reference by other functions or NULL in case of error.
- osMutexId_t osMutexNew (const osMutexAttr_t *attr);
-
- /// Get name of a Mutex object.
- /// \param[in] mutex_id mutex ID obtained by \ref osMutexNew.
- /// \return name as NULL terminated string.
- const char *osMutexGetName (osMutexId_t mutex_id);
-
- /// Acquire a Mutex or timeout if it is locked.
- /// \param[in] mutex_id mutex ID obtained by \ref osMutexNew.
- /// \param[in] timeout \ref CMSIS_RTOS_TimeOutValue or 0 in case of no time-out.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osMutexAcquire (osMutexId_t mutex_id, uint32_t timeout);
-
- /// Release a Mutex that was acquired by \ref osMutexAcquire.
- /// \param[in] mutex_id mutex ID obtained by \ref osMutexNew.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osMutexRelease (osMutexId_t mutex_id);
-
- /// Get Thread which owns a Mutex object.
- /// \param[in] mutex_id mutex ID obtained by \ref osMutexNew.
- /// \return thread ID of owner thread or NULL when mutex was not acquired.
- osThreadId_t osMutexGetOwner (osMutexId_t mutex_id);
-
- /// Delete a Mutex object.
- /// \param[in] mutex_id mutex ID obtained by \ref osMutexNew.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osMutexDelete (osMutexId_t mutex_id);
-
-
- // ==== Semaphore Management Functions ====
-
- /// Create and Initialize a Semaphore object.
- /// \param[in] max_count maximum number of available tokens.
- /// \param[in] initial_count initial number of available tokens.
- /// \param[in] attr semaphore attributes; NULL: default values.
- /// \return semaphore ID for reference by other functions or NULL in case of error.
- osSemaphoreId_t osSemaphoreNew (uint32_t max_count, uint32_t initial_count, const osSemaphoreAttr_t *attr);
-
- /// Get name of a Semaphore object.
- /// \param[in] semaphore_id semaphore ID obtained by \ref osSemaphoreNew.
- /// \return name as NULL terminated string.
- const char *osSemaphoreGetName (osSemaphoreId_t semaphore_id);
-
- /// Acquire a Semaphore token or timeout if no tokens are available.
- /// \param[in] semaphore_id semaphore ID obtained by \ref osSemaphoreNew.
- /// \param[in] timeout \ref CMSIS_RTOS_TimeOutValue or 0 in case of no time-out.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osSemaphoreAcquire (osSemaphoreId_t semaphore_id, uint32_t timeout);
-
- /// Release a Semaphore token up to the initial maximum count.
- /// \param[in] semaphore_id semaphore ID obtained by \ref osSemaphoreNew.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osSemaphoreRelease (osSemaphoreId_t semaphore_id);
-
- /// Get current Semaphore token count.
- /// \param[in] semaphore_id semaphore ID obtained by \ref osSemaphoreNew.
- /// \return number of tokens available.
- uint32_t osSemaphoreGetCount (osSemaphoreId_t semaphore_id);
-
- /// Delete a Semaphore object.
- /// \param[in] semaphore_id semaphore ID obtained by \ref osSemaphoreNew.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osSemaphoreDelete (osSemaphoreId_t semaphore_id);
-
-
- // ==== Memory Pool Management Functions ====
-
- /// Create and Initialize a Memory Pool object.
- /// \param[in] block_count maximum number of memory blocks in memory pool.
- /// \param[in] block_size memory block size in bytes.
- /// \param[in] attr memory pool attributes; NULL: default values.
- /// \return memory pool ID for reference by other functions or NULL in case of error.
- osMemoryPoolId_t osMemoryPoolNew (uint32_t block_count, uint32_t block_size, const osMemoryPoolAttr_t *attr);
-
- /// Get name of a Memory Pool object.
- /// \param[in] mp_id memory pool ID obtained by \ref osMemoryPoolNew.
- /// \return name as NULL terminated string.
- const char *osMemoryPoolGetName (osMemoryPoolId_t mp_id);
-
- /// Allocate a memory block from a Memory Pool.
- /// \param[in] mp_id memory pool ID obtained by \ref osMemoryPoolNew.
- /// \param[in] timeout \ref CMSIS_RTOS_TimeOutValue or 0 in case of no time-out.
- /// \return address of the allocated memory block or NULL in case of no memory is available.
- void *osMemoryPoolAlloc (osMemoryPoolId_t mp_id, uint32_t timeout);
-
- /// Return an allocated memory block back to a Memory Pool.
- /// \param[in] mp_id memory pool ID obtained by \ref osMemoryPoolNew.
- /// \param[in] block address of the allocated memory block to be returned to the memory pool.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osMemoryPoolFree (osMemoryPoolId_t mp_id, void *block);
-
- /// Get maximum number of memory blocks in a Memory Pool.
- /// \param[in] mp_id memory pool ID obtained by \ref osMemoryPoolNew.
- /// \return maximum number of memory blocks.
- uint32_t osMemoryPoolGetCapacity (osMemoryPoolId_t mp_id);
-
- /// Get memory block size in a Memory Pool.
- /// \param[in] mp_id memory pool ID obtained by \ref osMemoryPoolNew.
- /// \return memory block size in bytes.
- uint32_t osMemoryPoolGetBlockSize (osMemoryPoolId_t mp_id);
-
- /// Get number of memory blocks used in a Memory Pool.
- /// \param[in] mp_id memory pool ID obtained by \ref osMemoryPoolNew.
- /// \return number of memory blocks used.
- uint32_t osMemoryPoolGetCount (osMemoryPoolId_t mp_id);
-
- /// Get number of memory blocks available in a Memory Pool.
- /// \param[in] mp_id memory pool ID obtained by \ref osMemoryPoolNew.
- /// \return number of memory blocks available.
- uint32_t osMemoryPoolGetSpace (osMemoryPoolId_t mp_id);
-
- /// Delete a Memory Pool object.
- /// \param[in] mp_id memory pool ID obtained by \ref osMemoryPoolNew.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osMemoryPoolDelete (osMemoryPoolId_t mp_id);
-
-
- // ==== Message Queue Management Functions ====
-
- /// Create and Initialize a Message Queue object.
- /// \param[in] msg_count maximum number of messages in queue.
- /// \param[in] msg_size maximum message size in bytes.
- /// \param[in] attr message queue attributes; NULL: default values.
- /// \return message queue ID for reference by other functions or NULL in case of error.
- osMessageQueueId_t osMessageQueueNew (uint32_t msg_count, uint32_t msg_size, const osMessageQueueAttr_t *attr);
-
- /// Get name of a Message Queue object.
- /// \param[in] mq_id message queue ID obtained by \ref osMessageQueueNew.
- /// \return name as NULL terminated string.
- const char *osMessageQueueGetName (osMessageQueueId_t mq_id);
-
- /// Put a Message into a Queue or timeout if Queue is full.
- /// \param[in] mq_id message queue ID obtained by \ref osMessageQueueNew.
- /// \param[in] msg_ptr pointer to buffer with message to put into a queue.
- /// \param[in] msg_prio message priority.
- /// \param[in] timeout \ref CMSIS_RTOS_TimeOutValue or 0 in case of no time-out.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osMessageQueuePut (osMessageQueueId_t mq_id, const void *msg_ptr, uint8_t msg_prio, uint32_t timeout);
-
- /// Get a Message from a Queue or timeout if Queue is empty.
- /// \param[in] mq_id message queue ID obtained by \ref osMessageQueueNew.
- /// \param[out] msg_ptr pointer to buffer for message to get from a queue.
- /// \param[out] msg_prio pointer to buffer for message priority or NULL.
- /// \param[in] timeout \ref CMSIS_RTOS_TimeOutValue or 0 in case of no time-out.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osMessageQueueGet (osMessageQueueId_t mq_id, void *msg_ptr, uint8_t *msg_prio, uint32_t timeout);
-
- /// Get maximum number of messages in a Message Queue.
- /// \param[in] mq_id message queue ID obtained by \ref osMessageQueueNew.
- /// \return maximum number of messages.
- uint32_t osMessageQueueGetCapacity (osMessageQueueId_t mq_id);
-
- /// Get maximum message size in a Memory Pool.
- /// \param[in] mq_id message queue ID obtained by \ref osMessageQueueNew.
- /// \return maximum message size in bytes.
- uint32_t osMessageQueueGetMsgSize (osMessageQueueId_t mq_id);
-
- /// Get number of queued messages in a Message Queue.
- /// \param[in] mq_id message queue ID obtained by \ref osMessageQueueNew.
- /// \return number of queued messages.
- uint32_t osMessageQueueGetCount (osMessageQueueId_t mq_id);
-
- /// Get number of available slots for messages in a Message Queue.
- /// \param[in] mq_id message queue ID obtained by \ref osMessageQueueNew.
- /// \return number of available slots for messages.
- uint32_t osMessageQueueGetSpace (osMessageQueueId_t mq_id);
-
- /// Reset a Message Queue to initial empty state.
- /// \param[in] mq_id message queue ID obtained by \ref osMessageQueueNew.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osMessageQueueReset (osMessageQueueId_t mq_id);
-
- /// Delete a Message Queue object.
- /// \param[in] mq_id message queue ID obtained by \ref osMessageQueueNew.
- /// \return status code that indicates the execution status of the function.
- osStatus_t osMessageQueueDelete (osMessageQueueId_t mq_id);
-
-
- #ifdef __cplusplus
- }
- #endif
-
- #endif // CMSIS_OS2_H_
归档链接:
CMSIS-RTOS2 文档翻译 之 简介
CMSIS-RTOS2 文档翻译 之 修订记录
CMSIS-RTOS2 文档翻译 之 功能概述
CMSIS-RTOS2 文档翻译 之 RTOS 验证 |
 微信公众号
微信公众号
 手机版
手机版










就是相关的教程和文档比较少,用的人比较少,你很有前瞻性啊。
之前都是自己封装RTOS的接口,发现cmsis_os后,既然都有统一的接口,干脆就拿来用了,比自己封装的要好很多
刚去你 GitHub 逛啦一圈