|
到目前为止,在需要使电机驱动器控制电机时,还在使用通常的方案:选好电机驱动器和电机后,根据电机驱动器设计上位机控制板,上位机与电机控制板之间通过几条TTL控制线连接,然后设计控制程序驱动电机控制板:PWM、中断、计数等。 相信绝大部分人都是选用这种方案,而且觉的没毛病,很好呀。: U3 t7 j) h/ }4 @7 \8 u2 _ 其实以上方案有几个问题: 1. 上位机控制板与电机驱动板之间的连接线过多。在只有一个电机需要控制的情况下,这一点还不重要。但如果要同时控制多个,如3D打印机至少3个,多足机器人可能用到7、8个甚至十多个,问题就来了,光连接这么多的控制线就是问题,更别说一般的MCU有没有那么多的GPIO使用了。而且连接这么多的TTL控制线,稳定性抗干扰能力都容易出现问题。 2. 上位机的程序除了要完成上层应用逻辑外,还得完成低层的电机控制流程,这会使上层应用程序复杂度增加,处理的逻辑层次增多,不便于设计出稳定的上位机控制程序。同样在出现多个电机需要控制时,上位机的MCU需要腾出太多的CPU时间来处理电机控制问题,可能使其负荷严重不足,程序难以调试稳定。6 U% H3 j" h$ G7 h; D 3. 目前大部分的电机驱动反都是使用TTL方式连接控制,对于控制结构比较分散的应用,如机器人、自动装置来说,其控制信号的传输极易受到干扰,可能造成工作不稳定。 针对上面这些问题,一种以RS485总线为基础的命令式电机驱动器会是更好的选择。依附RS485总线比较强的抗干扰能力和较大的传输距离,通过一定的协议以寻址的方式,可以让一个上位机控制板通过一个简单的串口,就可以很好的解决上述所有问题:多个电机驱动器只需要一条RS485总线(最多4条线)即可方便的实现多机联合控制,而且只需要发送简单的二进制命令即可完成对电机的高级操作。 这样上位机的软硬件设计都得到了极大的简化,特别是软件程序设计,基本不用考滤电机的具体控制方式,只需要对它发送动作需求式的命令即可,这样上位机程序只需要专注于上层应用的实现即可,在逻辑层次上就简化了设计。 目前市面上在售的这种电机控制板有天津飞普达能科技有限公司的FLST系列步进电机驱动器和FLDC系列直流电机驱动器,这些控制板设计尺寸很小,很方便集成到产品中。# C& L/ S3 C8 e+ Z2 a/ x7 T" F 参考网址: https://item.taobao.com/item.htm?id=569017191650 https://item.taobao.com/item.htm?id=565970393141  I/ y: z& C0 i/ \ I/ y: z& C0 i/ \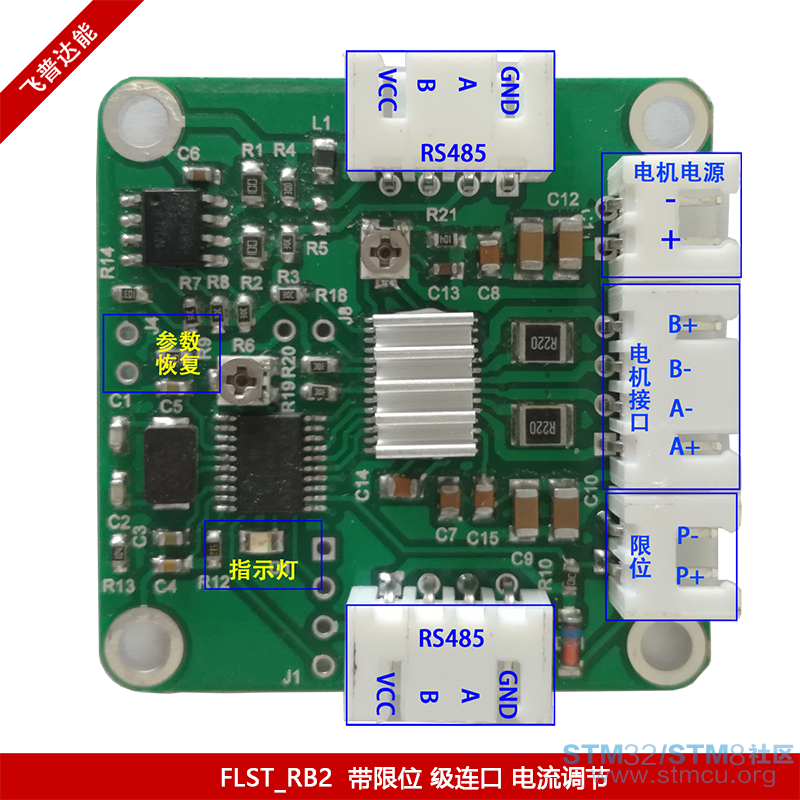 |











