通常输出PWM波形的时候是一直输出的。但是在电机控制中往往只需要输出一定个数的脉冲,不需要一直输出,那么这就需要每次输出PWM时,输出的脉冲个数可控。要实现这个功能,一般有三种方法。
方法一:
- void TIM1_PWM_Init(u16 arr, u16 psc)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
- TIM_OCInitTypeDef TIM_OCInitSturcture;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1, ENABLE);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_Init(&NVIC_InitStructure);
- TIM_TimeBaseInitStructure.TIM_Period = arr;
- TIM_TimeBaseInitStructure.TIM_Prescaler = 71;
- TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0x00;
- TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);
- TIM_OCStructInit(& TIM_OCInitSturcture);
- TIM_OCInitSturcture.TIM_OCMode = TIM_OCMode_PWM2;
- TIM_OCInitSturcture.TIM_OutputState = TIM_OutputState_Enable;
- TIM_OCInitSturcture.TIM_Pulse = 0;
- TIM_OCInitSturcture.TIM_OCPolarity = TIM_OCPolarity_Low;
- TIM_OC1Init(TIM1, &TIM_OCInitSturcture);
- TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
- TIM_CtrlPWMOutputs(TIM1, ENABLE); //主输出使能
- TIM_ARRPreloadConfig(TIM1, ENABLE);
- TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE);
- TIM_Cmd(TIM1, ENABLE); //使能计数器
- TIM_SetCompare1(TIM1, arr / 2);
- }
- void TIM1_UP_IRQHandler(void)
- {
- static u16 y;
- if(TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET)
- {
- TIM_ClearITPendingBit(TIM1, TIM_IT_Update );
- y++;
- if(y > 60) //设置输出脉冲数
- {
- y = 0;
- TIM_Cmd(TIM1, DISABLE);
- }
- }
- }
这个方法实现的原理最简单,就是开启PWM输出的更新中断功能,当计时器值重新加载一次时,就会产生一个中断,就代表输出了一个脉冲。这样每进一次中断,就统计一次中断次数,当中断的次数和需要的脉冲数相等时就关闭PWM的输出。这样也就实现了指定脉冲输出的功能。
方法二:
- void PWMS8_Init(u32 Cycle, u32 PulseNum)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM8, ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOC, &GPIO_InitStructure);
- TIM_TimeBaseStructure.TIM_Period = Cycle; //频率
- TIM_TimeBaseStructure.TIM_Prescaler = 71; //分频值 72M/(71+1) = 1M
- TIM_TimeBaseStructure.TIM_ClockDivision = 0;
- TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseStructure.TIM_RepetitionCounter = PulseNum - 1; //输出脉冲个数
- TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure);
- TIM_GenerateEvent(TIM8, TIM_EventSource_Update);
- TIM_InternalClockConfig(TIM8);
- TIM_SelectOCxM(TIM8, TIM_Channel_2, TIM_OCMode_PWM2);
- /* PWM1 Mode configuration: Channel2 */
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
- TIM_OCInitStructure.TIM_Pulse = Cycle / 2; // 低电平时间 占空比
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCNPolarity_Low;
- TIM_OC2Init(TIM8, &TIM_OCInitStructure);
-
- TIM_OC2PreloadConfig(TIM8, TIM_OCPreload_Enable);
- TIM_ARRPreloadConfig(TIM8, ENABLE);
-
- /* TIM8 enable counter */
- TIM_CtrlPWMOutputs(TIM8, ENABLE);
- TIM_SelectOnePulseMode(TIM8, TIM_OPMode_Single);
- TIM_Cmd(TIM8, ENABLE);
- }
在方法一中是通过代码自己统计ARR的装载次数,而单片机内部也自带了这个功能,方法二中就直接使用这个系统自带的功能。这个功能就是重复计数器。
![E`IP60)AW(N]6PV}OIW0]`N.png](data/attachment/forum/202203/19/203824m0h6cuq81eu1pzu5.png "E`IP60)AW(N]6PV}OIW0]`N.png")

)Q_%B@XYZ$P67.png")
在初始化时将要输出的脉冲个数写入到重复计数器中,这样系统就会自动统计输出PWM的脉冲个数,当输出脉冲个数完成后就会自动停止PWM输出。
方法三:
- /***********************TIM1初始化函数*************************/
- /****参数:****************************************************/
- /******u32 Cycle用于设定计数频率(计算公式:Cycle=1Mhz/目标频率)*/
- /****返回值:**************************************************/
- /******无*****************************************************/
- void TIM1_config(u32 Cycle)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_TIM1 , ENABLE); //时钟使能
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //TIM1_CH1 PA10
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- TIM_TimeBaseStructure.TIM_Period = Cycle-1; //使用Cycle来控制频率(f=72/(71+1)/Cycle) 当Cycle为100时脉冲频率为10KHZ
- TIM_TimeBaseStructure.TIM_Prescaler =71; //设置用来作为TIMx时钟频率除数的预分频值
- TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS= Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; //重复计数,一定要=0!!!(高级定时器特有)
- TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- TIM_OCInitStructure.TIM_Pulse = Cycle/2-1; //设置待装入捕获寄存器的脉冲值(占空比:默认50%,这可也可以调节如果需要的话将它作为一个参数传入即可)
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性
- TIM_OC3Init(TIM1, &TIM_OCInitStructure); //使能通道1
- TIM_SelectMasterSlaveMode(TIM1, TIM_MasterSlaveMode_Enable); //设置为主从模式
- TIM_SelectOutputTrigger(TIM1, TIM_TRGOSource_Update); //选择定时器1的触发方式(使用更新事件作为触发输出)
- TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能通道1预装载寄存器
- TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIM1在ARR上的预装载寄存器
- }
- /***********************TIM2初始化函数*************************/
- /****参数:****************************************************/
- /******u32 PulseNum用于设定脉冲数量****************************/
- /****返回值:*************************************************/
- /******无*****************************************************/
- void TIM2_config(u32 PulseNum)
- {
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能定时器2的时钟
- TIM_TimeBaseStructure.TIM_Period = PulseNum; //脉冲数
- TIM_TimeBaseStructure.TIM_Prescaler =0;
- TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
- TIM_SelectInputTrigger(TIM2, TIM_TS_ITR0); //选择定时器2的输入触发源(内部触发(TIM1))
- TIM2->SMCR|=0x07; //设置从模式寄存器(SMS[2:0]:111 外部时钟模式1)
- TIM_ITConfig(TIM2,TIM_IT_Update,DISABLE); //更新中断失能
- NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_Init(&NVIC_InitStructure); //定时器2中断初始化
- }
- /************************脉冲输出函数**************************/
- /****参数:****************************************************/
- /******u32 Cycle用于设定计数频率(计算公式:Cycle=1Mhz/目标频率)*/
- /******u32 PulseNum用于设定输出脉冲的数量(单位:个)************/
- /****返回值:**************************************************/
- /******无*****************************************************/
- void Pulse_output(u32 Cycle,u32 PulseNum)
- {
- TIM2_config(PulseNum); //设置脉冲数量
- TIM_Cmd(TIM2, ENABLE); //使能TIM2(从定时器)
- TIM_ClearITPendingBit(TIM2,TIM_IT_Update); //清除中断标志位
- TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); //使能更新中断
- TIM1_config(Cycle); //使能定时器1(主定时器)
- TIM_Cmd(TIM1, ENABLE); //使能定时器1
- TIM_CtrlPWMOutputs(TIM1, ENABLE); //高级定时器一定要加上,主输出使能
- }
- /********************定时器2的中断服务函数**********************/
- /****参数:****************************************************/
- /******u32 PulseNum用于设定脉冲数量****************************/
- /****返回值:*************************************************/
- /******无*****************************************************/
- /****函数说明:************************************************/
- /*当TIM的CNT寄存器的值到达设定的Update值会触发更新中断,此时设定的脉冲数已输出完毕,关闭TIM1和TIM2*/
- void TIM2_IRQHandler(void)
- {
- if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) //TIM_IT_Update
- {
- TIM_ClearITPendingBit(TIM2, TIM_IT_Update); // 清除中断标志位
- TIM_CtrlPWMOutputs(TIM1, DISABLE); //主输出失能
- TIM_Cmd(TIM1, DISABLE); //关闭定时器
- TIM_Cmd(TIM2, DISABLE); //关闭定时器
- TIM_ITConfig(TIM2, TIM_IT_Update, DISABLE); //关闭TIM2更新中断
- }
- }
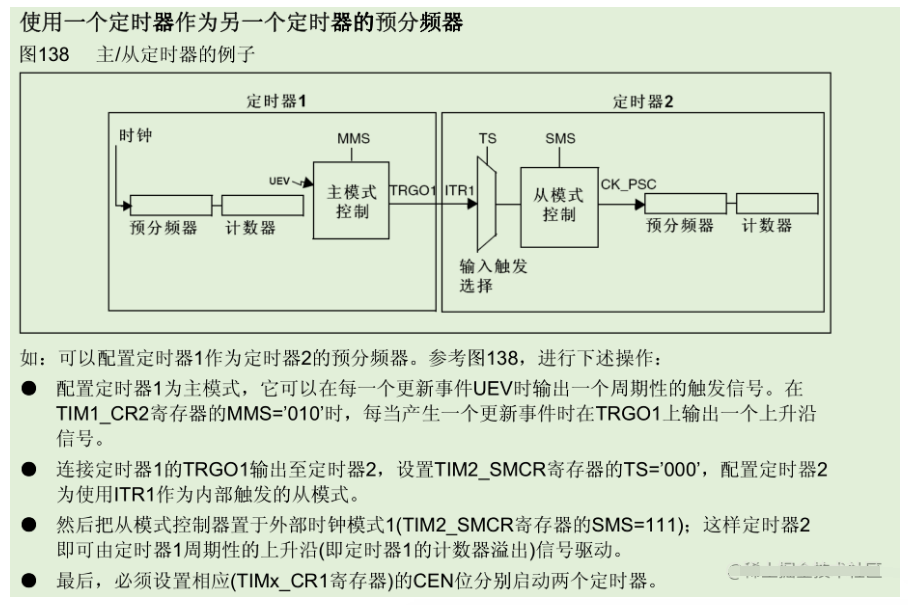
方法三使用了系统自带的定时器同步功能,也就是定时器1输出PWM波,然后将定时器1的输出同步到定时器2上,然后通过定时器2的计数器给定时器1输出的脉冲计数,当计数值等于指定值时,关闭定时器1的输出。

![M5SVPO4K]KG3Z`EXGJVKV.png](data/attachment/forum/202203/19/203823vju86p08esooz893.png "M5SVPO4K]KG3Z`EXGJVKV.png")
定时器1设置为主模式,定时器2设置为从模式。将定时器1的PWM输出作为定时器2的时钟。这样设置定时器2的频率值,也就相当于设置的是定时器1的脉冲输出个数。
将这三种模式统一在主函数中进行测试。
- int main(void)
- {
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
- delay_init();
- while(1)
- {
- //调用一次 发一次脉冲
- //TIM1_PWM_Init(899,0); //方法一
- Pulse_output(100,16); //方法二
- //PWMS8_Init(1000,6); //方法三
- delay_ms(500);
- }
- }
在主函数中分别调用这三种方法,然后通过示波器就可以看出,当PWM输出一定的脉冲数后就会停止输出。
|
.png) STMCU小助手
发布时间:2022-3-19 20:37
STMCU小助手
发布时间:2022-3-19 20:37
 微信公众号
微信公众号
 手机版
手机版