.png) STMCU小助手
发布时间:2022-3-20 13:49
STMCU小助手
发布时间:2022-3-20 13:49
最近整理东西,突然发现以前买的一个步进电机模块,以前使用5V单片机驱动的。突然想试试能不能用STM32F103单片机的3.3V直接驱动ULN2003这个芯片。8UB}4SOZ5GCU.png")
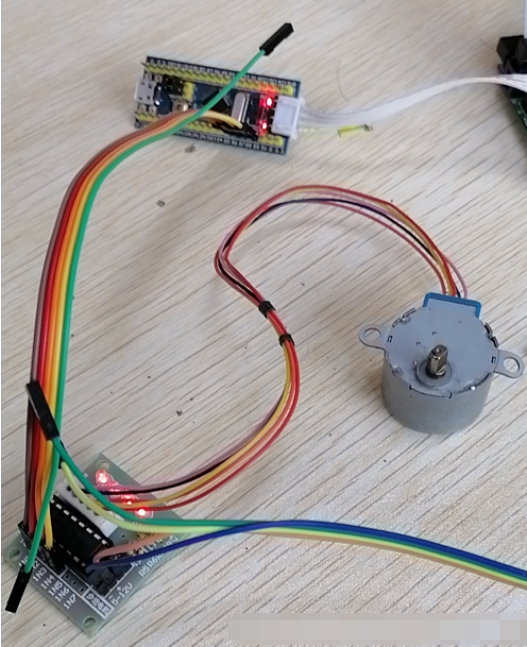
试了一下ULN2003可以用3.3V电压直接驱动。下面分享下电机驱动的过程。 先看看实物图 
单片机使用的是STM32F103C8T6最小系统。电机和驱动板是网上买的整套模块。 驱动板的原理图如下 49TZV$`SY)T_~@EHLN4.png")
步进电机使用的是5线4相直流减速步进电机 直径:28mm 电压:5V 步进角度:5.625 x 1/64 减速比:1/64 步距角:5.625 / 64 = 0.087度 (也就是说理论上,你给一个脉冲,电机外部轴转动0.087度)也就是说一个脉冲内部转子转5.625度,但是由于减速64倍,所以外部轴只转了0.087度那么外部轴要转一圈的话,需要360/0.087=4096个脉冲。采用4相8拍驱动的话,8个脉冲是一个周期,那么就需要4096/8=512个周期,外部轴刚好转一圈。 电机的驱动一般分为3种方法 一. 1相励磁法:每一瞬间只有一个线圈相通,其它休息。 (优点)简单,耗电低,精确性良好。 (缺点)力矩小,振动大,每次励磁信号走的角度都是标称角度。 1相励磁法 A->B->C->D 二、 2相励磁法:每一瞬间有两个线圈导通。 (优点)力矩大,震动小。 (缺点)每励磁信号走的角度都是标称角度。2相励磁法 AB->BC->CD->DA 三、 1-2相励磁法:1相和2相交替导通。 (优点)精度较高,运转平滑,每送一个励磁信号转动1/2标称角度,称为半步驱动。(前两种称为4相4拍,这一种称为4相8拍) 1-2相励磁法 A-->AB-->B->BC->C-->CD->D-->DA 下面就用代码来实现这三种方式 ULN2003这个小驱动板上IN1、IN2、IN3、IN4四个插针和单片机的 IO口直接用杜邦线连接,为了方便控制,首先定义好要使用的 IO口。就直接在LED的工程上修改。 首先新建一个bsp_motor.h的头文件,在头文件里面进行端口声明。
这里使用PB口的6、7、8、9四个端口来控制,端口使用了位带定义的方法,这样用程序控制起来更方便。关于位带定义可以自己查阅相关资料。端口和时钟都使用了宏定义重新命名。这样以后需要更改IO口的时候,只需要在头文件中更改,不需要更改程序中的代码,方便程序移植。 下面开始编写驱动代码,首先使用1相励磁法,也就是使4个IO口轮流为高电平,可以直接使用位带操作,依次给LA、LB、LC、LD给高电平。但是这样写的话每一种驱动方式都要写一个驱动函数,为了使操作起来更方便,将这4个口的值组成一个字节,并存在数组中,通过下标轮流调用数组中的数就行。这里将LA作为字节得最低位bit0,将LD作为字节第3位bit3。 这样电机导通相序为 D-C-B-A时,定义数组中的值为
电机导通相序为 A-B-C-D 是,数组中的值为
下面新建bsp_motor.c文件,并在里面编写一个函数来调用这个数组就行了
通过一个for循环,依次读取数组中的值,然后根据A、B、C、D四相的位置,去读取对应位的值,直接赋值给 IO口。这样电机驱动的函数就写好了,在主程序中直接调用这个函数就可以控制电机转动了。 如果要改成 2相励磁法驱动的话,直接替换数组中的数据就行。
如果要改成 1-2相励磁法,依然是直接修改数组中的值就行。
通过 1-2相励磁法控制的话,每次需要发送8个脉冲,也就是4相8拍,这样一个周期需要发送8个数组,要在for循环中将循环数量改为8。
然后在主程序中直接调用这个函数就可以让电机转起来了。
这样看来驱动电机是很简单的用keil模拟的仿真波形 1相励磁法 D-C-B-A 
2相励磁法 DC-CB-BA-AD ![AGJKC7@8]J%@`[_LV@0G2[R.png](data/attachment/forum/202203/20/134957ji55is5snlsdaiit.png "AGJKC7@8]J%@`[_LV@0G2[R.png")
1-2相励磁法 D-DC-C-CB-B-BA-A-AD 
波形和理论相符,说明驱动是正确的。 到这里应该就结束了,但是又手贱的给主程序加了个LED闪灯的程序,这一加出事了。
主程序中加了一个20ms的延时,同时让LED灯翻转。程序烧进去之后,发现电机不转了。这是怎么回事?赶紧看看仿真波形。 ![{XC44]]99JQ3{FJLJ[6]`7K.png](data/attachment/forum/202203/20/134956mu8urui5r49yl598.png "{XC44]]99JQ3{FJLJ[6]`7K.png")
这一看发现了问题,A项的波形怎么高电平突然变长了?
数组中依次给的值是8、4、2、1,也就是D、C、B、A相依次为高电平,其他三相高电平只持续了2ms,但是A相的电平持续了20多ms,这是什么原因?仔细分析程序执行流程后发现了问题所在。在for循环中依次给4个相赋值,A相位最后一个赋值,当给A项赋值时,其他3项为低电平,A项为高电平,然后程序退出for循环,回到主程序中,此时又执行了20ms的延时,这时A项的电平还是最后一次赋值的高电平。将这20ms延时去掉后,电机正常运转,波形也正常了。也就是说就是这个延时影响了电机的转动。 那么主程序中就不能用延时了吗?LED闪烁功能都实现不了了吗?还能让一个电机驱动程序把单片机霸占了不成?这当然是不行了,一定要将这个问题的根源找到,既然是最后一次给A项赋值后,A项高电平没有复位,那么就手动让A项复位。强制让A项的电平归零。 在增加一个复位的函数
这个函数强制的将四相复位,然后在电机驱动的时候,每次执行完一个周期,就强制让这4项复位。
增加复位功能后,主程序中依然加上20ms延时,继续仿真查看波形。 ![~O(]I`L[}VLQAD_HBB4[}VS.png](data/attachment/forum/202203/20/134956dwheoe2ooonhhezs.png "~O(]I`L[}VLQAD_HBB4[}VS.png")
这下波形正常了,下载程序后电机也缓慢转动起来了,LED灯也开始闪烁了。说明刚开始驱动时只想到了相位的逻辑,但是没有考虑到相位复位的问题,考虑问题还是不全面。 下来在主程序中加上电机正反转功能,让电机正转一圈,然后又反转一圈。
这里采用4相8拍驱动,8个脉冲是一个周期,那么就需要4096/8=512个周期,外部轴刚好转一圈。计数器小于512时正转,计时器在512和1024之间时反转。然后LED灯翻转一次,在延时500ms。 这里还要注意一个问题,在电机驱动函数中,每个脉冲的延时时间经过实际测试不能小于2ms,延时太小的时候,电机抖动严重,但是不会转动。延时越大,电机转动越慢。 到此电机驱动程序已经完美运行了。 |
【福利三:雨露均沾·逢7狂欢】之三:AI帮我查BUG
福利三:雨露均沾·逢7狂欢】之二:STM32F407VG串口通信乱码故障的排除
基于STM32F103的I2C主从机通信
OpenBLT移植到STM32F103战舰开发板上适用于所有STM32F103系列的Bootloader
TFT LCD 与 FSMC 的硬件连接大容量 STM32F10xxx FSMC 接口
单片机:初学者该了解的STM32F103基础知识
2025软件工具兔哥知道
STM32之继电器模块
STM32固件库分享,超全系列整理
【MCU实战经验】基于STM32F103的二轮平衡车(6轴上位机 源代...
 微信公众号
微信公众号
 手机版
手机版