.png) STMCU小助手
发布时间:2021-7-26 11:12
STMCU小助手
发布时间:2021-7-26 11:12
|
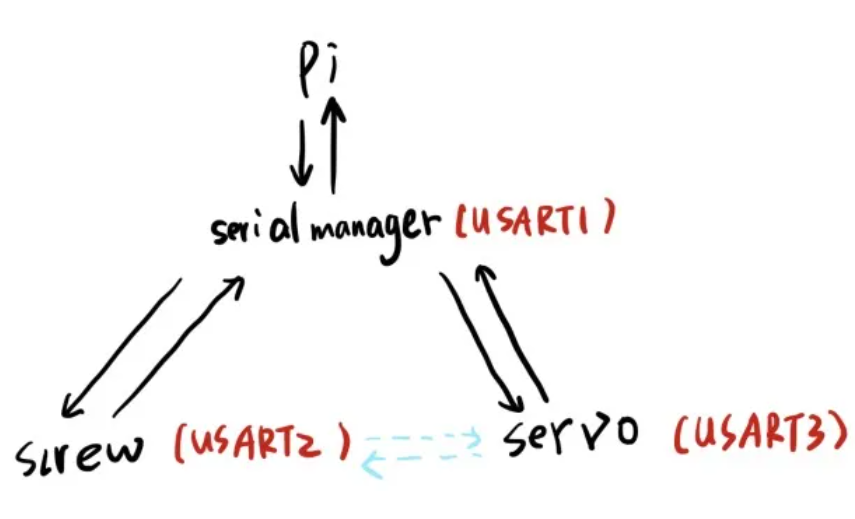
因为arduino控制丝杆和控制拨片的板子都只有1个串口,他们彼此之间需要互相通信,而且还需要和树莓派通信,因此串口数目就不够了,于是我就用STM32F103芯片做了一个串口数据管理器,STM32F103芯片有3个串口,分别是USART1~3,因此我就分了UART1串口和树莓派通信,UART2和驱动拨片的板子通信,UART3和驱动丝杆的板子通信。 任务分析 
串口数据流分配大概如上图所示,黑色的箭头即表示了串口数据流,这都还是好理解的,唯一有些难理解的就是蓝色箭头了。 蓝色箭头指的是舵机驱动板和丝杆驱动板借由STM32F103芯片实现间接的互相通信。 STM32F103在其中扮演着相当重要的命令,由其解析树莓派下发的命令,并且将任务准确分配到舵机驱动板和丝杆驱动板,并且其还解析丝杆驱动板和舵机驱动板上发的命令,保证2块驱动板之间也能实现通信。这样才能最终保证整个串口数据流的稳定。 STM32CubeMX配置工程 首先在STM32CubeMX里面选择我们的芯片(STM32F103C8Tx) 
首先我们来配置SYS为Serial Wire,并把基准时钟配置为SysTick 
接下来配置RCC 
完成了芯片基本配置之后就开始配置串口了,因为舵机驱动板和丝杆驱动板的串口波特率都是9600,因此USART2和USART3的波特率都配置成了9600,那么为了保证一致,我也就将STM32F103与树莓派通信的波特率也配置成了9600,具体配置如下。 


完成了串口配置之后可以看到芯片的引脚使用图如下所示, 
那么至此我们以及完成了芯片的配置,接下来就要生成工程了,我用的开发环境是Keil5,因此我选择的IDE是MDK-ARM V5。 
还有下图2个选项默认是不会勾选的,但是为了减小生成的Keil5工程文件的大小,我建议都勾选上,第一个是只包含必要的库,第二个是将外设文件都按照.c和.h进行分类。 
完成工程配置之后,点下图这个文件就可以生成工程啦。 
然后就可以编译生成的工程文件了,如果出现了下图错误,请参照文章[url=*https://www.guyuehome.com/29307]《CubeMX配置STM32F103C8T6芯片调试光电传感器》[/url] 
逻辑撰写 首先我们将各个串口重命名一下,减少程序的耦合性
|
从 CubeMX 到 MX2:这些关键变化必须知道
ST推出全新STM32CubeMX2,秒启动,告别卡顿和臃肿!
STM32CubeMX出2.0了!CubeMX2速览-教程版
新版STM32CubeMX2初体验,抛弃了JAVA方案,采用Electron,启动速度非常流畅,不再支持MDK5
兔哥心中的ST中文论坛
实战经验 | 从CubeMX下载生成STM32元件封装库
软件工具我知道
效率与探索之间:STM32CubeMX与STM32CubeAI试用有感
STM32CubeMX-4.16.1生成MDK ARM.CMSIS.4.3.0' is not select
在主机模式下使用STM32Cube HAL I2C驱动
 微信公众号
微信公众号
 手机版
手机版