|
六、SPI 实验$ T* g6 P% f: P 实验目的:掌握和熟悉 SPI 软件模拟和硬件控制的使用和配置方法。' I5 ^1 D1 n2 a4 Z# y & l1 Z8 J9 B& k+ x, X% s+ j3 z; W+ | 1、软件模拟 SPI 驱动 TFT 实验 CubeMX 配置如下,保存后生成对应的配置代码: 
▲ CubeMX 配置 9 g2 i5 s B6 J1 w* F+ T本实验使用软件模拟 SPI,只需要对相应 IO 进行配置即可,注意需要配置 IO 速度等级,CLK 信号和 SDA 信号频率较高,需要配置为 very high。 / u& o0 v; {9 h$ M 相关操作函数说明:1 M* J, K! f! r; G void Lcd_Reset(void) ! m; Q' m% N2 }4 K 功能:液晶硬复位函数;7 e/ T1 o% G7 E3 C' X 参数:无; 返回:无; 说明:液晶初始化前需执行一次复位操作! F& ^% h0 r: y4 E) o1 s1 N* l void LCD_Initial(void) 功能:初始化液晶; 参数:无;6 o1 }( ^: ]# Z& J3 b* U 返回:无; 说明:在对液晶写入内容前需要进行初始化配置; void Lcd_ColorBox(unsigned int xStart,unsigned int yStart,unsigned int xLong,unsigned int yLong,unsigned int Color) 功能:Lcd 矩形填充函数; 参数 1:x 方向的起始点;# w z1 [) u9 F, Q; ] 参数 2:y 方向的起始点; 参数 3:x 方向的长度; 参数 4:y 方向的长度;/ S Q6 E' Y3 g8 e; q7 p% U; k7 e" v 参数 5:填充的颜色; 返回:无; 说明:将指定区域内填充指定颜色,常用于清屏 void BlockWrite(unsigned int Xstart,unsigned int Xend,unsigned int Ystart,unsigned int Yend)0 v s: ^. \; O0 o2 L k 2 H$ p# Q, i" \0 P3 Z0 t7 f q 功能:在一个指定位置开一个矩形框;$ l. z, D+ I$ Q W 参数 1:x 方向的起始点;. ]1 a0 ~0 Q+ ]; W 参数 2:x 方向的终点; 参数 3:y 方向的起始点;$ x0 @# X# U6 ] 参数 4:y 方向的终点; 返回:无; 说明:开一个矩形框,方便接下来往这个框填充数据; void DrawPixel(unsigned int x, unsigned int y, int Color)0 ]: u* r P$ N% B1 n1 O5 A 功能:在 x,y 坐标上打一个颜色为 Color 的点; 参数 1:x 坐标; 参数 2:y 坐标; 参数 3:点的颜色; 返回:无;6 u) G% D- J5 e2 s" Z! N; F& | void LCD_PutString(unsigned short x, unsigned short y, char *s, unsigned int fColor, unsigned int bColor,unsigned char flag) 0 t: ~( v9 B) s 功能:显示一个字符串;- [* o* s" v; g# o* x 参数 1:起始点 x 坐标; 参数 2:起始点 y 坐标;6 h$ ^1 s* R0 J( @4 P4 Z3 F 参数 3:字符串指针; 参数 4:前景色; 参数 5:背景色;6 R0 I! K3 k$ t' Q 参数 6:有无背景色; 返回:无 & O& e: v; P% a5 \ 核心代码:& s) K# v/ j" }) n' u LCD_Initial(); Lcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,Blue);//用蓝色清屏 Lcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,Red);//用红色清屏0 Y1 U5 d6 g( @% h _/ x) ^5 W Lcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,Green);//用绿色清屏 Lcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,White);//用白色清屏$ G8 X: U0 ^# d4 C2 _3 j LCD_PutString(10,10,"STM32G474Test",Red,White,0);//显示字符 在 main 函数中进行过外设初始化之后,对 LCD 进行初始化,然后分别用四种颜色清屏,最后显示测试字符。) z7 m& J. |: @2 J' B# f, X ' \2 \/ T/ H& T. d7 W A. D' V 实验现象:: ` _4 P, L, K, T+ W! {1 A 下载烧录后可以观察到屏幕分别刷新蓝红绿白四种颜色,最后显示测试字符STM32G474Test。 " Y- E, i0 g) _ 2、硬件 SPI 驱动 TFT 实验8 F2 ~0 \+ w. Z) }8 X& b4 ` CubeMX 配置如下,保存后生成对应的配置代码:: a$ x4 n! d) J2 F, v, z- f 
▲ CubeMX 进行 SPI 配置 
▲ CubeMX 进行 IO 速度配置7 X% C% y6 F5 S4 Z 本实验使用硬件 SPI,需要配置 SPI 的时钟分频,配置出合适的时钟速率,另外需要注意设置时钟信号的空闲电平以及采样边沿,还需要将高速的信号 IO 速度进行配置,其他 IO配置与软件模拟 SPI 相同。 / O* F, u# ~; y5 W( o' x; C/ g, M8 y1 P Y ) o; f! k$ _8 i7 o4 [7 G. w9 I相关操作函数说明: HAL_StatusTypeDef HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout) 功能:通过硬件 SPI 发送一组数据; 参数 1:SPI 句柄,根据实际需要填写; 参数 2:要发送数据的指针,常见为发送数据数组的首地址; 参数 3:发送数据长度,单位字节; - F- r' r; [# d& @/ O# [" y参数 4:发送超时时间,单位 ms; 返回:操作结果,HAL_OK,HAL_ERROR; ' G+ y: ?8 U, P示例:HAL_SPI_Transmit ( &hspi4,data_color,2*xLong,10 );//通过 SPI4 发送颜色数据 . F9 \+ F# d) ], `HAL_StatusTypeDef HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout) 3 E" E8 v3 G7 X$ T, b功能:通过硬件 SPI 接收一组数据; # e/ r" Y% W9 y+ I参数 1:SPI 句柄,根据实际需要填写; 参数 2:要接收数据保存指针; / W# F9 o; ^7 ^( ]* X4 D6 o. t5 c! T参数 3:接收数据长度,单位字节; & E. z! C6 Y0 ^% D3 D9 k: K8 l参数 4:接收超时时间,单位 ms; 返回:操作结果,HAL_OK,HAL_ERROR; HAL_StatusTypeDef HAL_SPI_TransmitReceive(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size, uint32_t Timeout) $ k. {6 M9 c7 S7 C' |功能:通过硬件 SPI 交换一组数据; 参数 1:SPI 句柄,根据实际需要填写; 参数 2:要发送数据的指针,常见为发送数据数组的首地址; * f- W! | u9 y# J1 B0 N. D! I$ t! ]参数 3:要接收数据的指针,接收数据数组的首地址; 参数 4:数据长度,单位字节; ! ?: }/ ?# t7 R& z9 V3 z/ [参数 5:超时时间,单位 ms; / M U$ b T. z返回:操作结果,HAL_OK,HAL_ERROR; 核心代码: LCD_Initial(); ! R z! H% Z' U3 @( ]' y: BLcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,Blue);//用蓝色清屏 6 C2 D$ K3 E2 k- L$ ^- s% GLcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,Red);//用红色清屏 ! W& ]3 u3 R, ^, xLcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,Green);//用绿色清屏 8 h2 }2 N: f+ ?Lcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,White);//用白色清屏 # a; ~2 J: n) |& ]; @1 wLCD_PutString(10,10,"STM32G474Test",Red,White,0);//显示字符 8 ^% |) S+ E3 s7 Y在 main 函数中进行过外设初始化之后,对 LCD 进行初始化,然后分别用四种颜色清屏,最后显示测试字符。 实验现象: 8 y! ]2 O d9 ?0 W5 q下载烧录后可以观察到屏幕分别刷新蓝红绿白四种颜色,最后显示测试字符STM32G474Test。 3、硬件 SPI 驱动 TFT 实验(DMA) CubeMX 配置如下,保存后生成对应的配置代码: 
▲ CubeMX 进行 SPI 的 DMA 配置 本实验使用硬件 SPI,使用 DMA 进行发送。 相关操作函数说明: HAL_StatusTypeDef HAL_SPI_Transmit_DMA(SPI_HandleTypeDef *hspi, uint8_t *pData,uint16_t Size) 功能:通过硬件 SPI 使用 DMA 方式发送一组数据; 参数 1:SPI 句柄,根据实际需要填写; 参数 2:要发送数据的指针,常见为发送数据数组的首地址; 参数 3:发送数据长度,单位字节; 返回:操作结果,HAL_OK,HAL_ERROR; 示例:HAL_SPI_Transmit_DMA ( &hspi4,data_color,2*xLong );//通过 SPI4 的 DMA 方式发送颜色数据 HAL_StatusTypeDef HAL_SPI_Receive_DMA(SPI_HandleTypeDef *hspi, uint8_t *pData,uint16_t Size) 功能:通过硬件 SPI 的 DMA 方式接收一组数据; 参数 1:SPI 句柄,根据实际需要填写; 参数 2:要接收数据保存指针; 参数 3:接收数据长度,单位字节; 返回:操作结果,HAL_OK,HAL_ERROR; HAL_StatusTypeDef HAL_SPI_TransmitReceive_DMA(SPI_HandleTypeDef *hspi, uint8_t*pTxData, uint8_t *pRxData, uint16_t Size) 功能:通过硬件 SPI 的 DMA 方式交换一组数据; 参数 1:SPI 句柄,根据实际需要填写; 参数 2:要发送数据的指针,常见为发送数据数组的首地址; 参数 3:要接收数据的指针,接收数据数组的首地址; 参数 4:数据长度,单位字节; 返回:操作结果,HAL_OK,HAL_ERROR; 注意:使用相应 DMA 时需要对该 DMA 请求进行配置; 核心代码: //发送函数修改 if((temp+1) % xLong == 0) { HAL_SPI_Transmit_DMA(&hspi4,data_color,2*xLong); while(!dma_flag_temp); dma_flag_temp = 0; } 使用 DMA 方式进行发送时需要确保上一次 DMA 发送已经完成,要避免重复请求。 void DMA1_Channel1_IRQHandler(void) { if(__HAL_DMA_GET_FLAG(&hdma_spi4_tx,DMA_FLAG_TC1)) { dma_flag_temp=1; __HAL_DMA_CLEAR_FLAG(&hdma_spi4_tx,DMA_FLAG_TC1); HAL_SPI_DMAStop(&hspi4); } HAL_DMA_IRQHandler(&hdma_spi4_tx); } ! |) x% V$ n% `( X0 D7 [ 在 DMA 中断中判断是否发生了 DMA 传输完成事件,如果 DMA 传输完成则将相应标志位置位,并清除标志。 LCD_Initial();Lcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,Blue);//用蓝色清屏 Lcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,Red);//用红色清屏 Lcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,Green);//用绿色清屏 Lcd_ColorBox(0,0,XSIZE_PHYS,YSIZE_PHYS,White);//用白色清屏 LCD_PutString(10,10,"STM32G474Test",Red,White,0);//显示字符 1 L5 v, q9 ~' ?/ |5 H: `+ \ 在 main 函数中进行过外设初始化之后,对 LCD 进行初始化,然后分别用四种颜色清屏,最后显示测试字符。 实验现象: 下载烧录后可以观察到屏幕分别刷新蓝红绿白四种颜色,最后显示测试字符STM32G474Test。 + v. X& E4 [1 d4 M2 f5 G8 }6 k6 P$ U. a 七、IIC实验 $ l3 P# E# K6 a实验目的:掌握和熟悉 IIC 软件模拟和硬件控制的使用和配置方法。 9 k/ \4 b- _1 e& D1、软件模拟 IIC 驱动 24C02 实验 CubeMX 配置如下,保存后生成对应的配置代码: 8 F1 I- X0 V: S+ i1 B3 z
▲ CubeMX 进行软件 IIC 的 IO 配置 本实验使用软件 IIC 模拟,只需要配置 IO,初始 IO 配置都配置为输出 IO 即可,24C02 外围电路有上拉电阻,不需要配置内部上拉。 ' Z( W z, {, a8 B相关操作函数说明: void SDA_Input_Mode() 功能:将 SDA 切换到输入模式; 参数:无; 返回:无; 说明:SDA 是双向的,在进行数据读取时需要切换到输入模式 void SDA_Output_Mode() 功能:将 SDA 切换到输出模式; 参数:无; 返回:无; 说明:SDA 是双向的,在进行数据发送时需要切换到输出模式 : `7 e( F7 E% K- V$ r _1 cvoid I2CStart(void) 功能:模拟 IIC 的起始信号; 参数:无; 返回:无; void I2CStop(void) 功能:模拟 IIC 的停止信号; 参数:无; 返回:无; ! a. T- V! F! z7 @6 s$ wunsigned char I2CWaitAck(void) 功能:模拟 IIC 等待应答; 参数:无; 返回:应答结果,ERROR 或 SUCCESS; void I2CSendAck(void) 功能:模拟 IIC 的应答信号; 参数:无; 返回:无; 0 v6 D4 Y! w F% o2 Z* P; ]' Jvoid I2CSendNotAck(void) 功能:模拟 IIC 的非应答信号; 参数:无; 返回:无; void I2CSendByte(unsigned char cSendByte) 功能:通过模拟 IIC 发送一个字节; 参数:需要发送的字节; 返回:无; unsigned char I2CReceiveByte(void) 功能:通过模拟 IIC 接收一个字节; 参数:无; 返回:接收到的字节; 核心代码: //24C02 读取一个字节 uint8_t x24c02_read(uint8_t address) { unsigned char val; I2CStart();//起始信号 I2CSendByte(0xa0);//发送器件写地址 I2CWaitAck();//等待应答 I2CSendByte(address);//发送读取的内存地址 I2CWaitAck();//等待应答 I2CStart();//起始信号 I2CSendByte(0xa1);//发送器件读地址 I2CWaitAck();//等待应答 val = I2CReceiveByte();//接收一个字节 I2CWaitAck();//等待应答 I2CStop();//停止信号 return(val); } //24C02 读取写入一个字节 void x24c02_write(uint8_t address, uint8_t info) { I2CStart();//起始信号 I2CSendByte(0xa0);//发送器件写地址 I2CWaitAck();//等待应答 I2CSendByte(address);//发送写入的内存地址 I2CWaitAck();//等待应答 I2CSendByte(info);//发送写入内容 I2CWaitAck();//等待应答 I2CStop();//停止信号 } 上述两个函数为 24C02 的读写函数,写器件地址为 0xA0,读器件地址为 0xA1,地址由外部电路连接决定。 I2CInit(); uint32_t i; ) G7 s3 j& z9 a7 N! wprintf(" 24C02 Test ....\r\n\r\n"); //向 0x00 内存地址写入数据 for(i = 0; i < 6; i++) { x24c02_write(i,Data_T); } printf(" 24C02 Write ok\r\n"); HAL_Delay(100); //从 0x00 内存地址读出数据 for(i = 0; i < DataSize; i++) Data_R=x24c02_read(i); printf(" 24C02 Read ok\r\n"); , }7 l! t- d! \" P2 G! Cprintf("24C02 Read Data : \r\n"); for(i = 0; i < DataSize; i++) printf("0x%02X ", Data_R); printf("\r\n\r\n"); if(memcmp(Data_T, Data_R, DataSize) == 0) { printf(" 24C02 Test OK\r\n"); } else { printf(" 24C02 Test Failed\r\n"); } $ `- A+ Z1 A& _ 以上为 main 函数中外设初始化结束后的部分,通过软件模拟 IIC 向 24C02 内存地址写入一段设定好的数据,然后将这段数据读出,最后进行对比。 - H* s4 i9 `/ h/ Z& h. N7 i实验现象: 下载烧录后可以观察到上位机串口助手打印测试数据。 
▲ 实验现象 2、硬件 IIC 驱动 24C02 实验 CubeMX 配置如下,保存后生成对应的配置代码: 
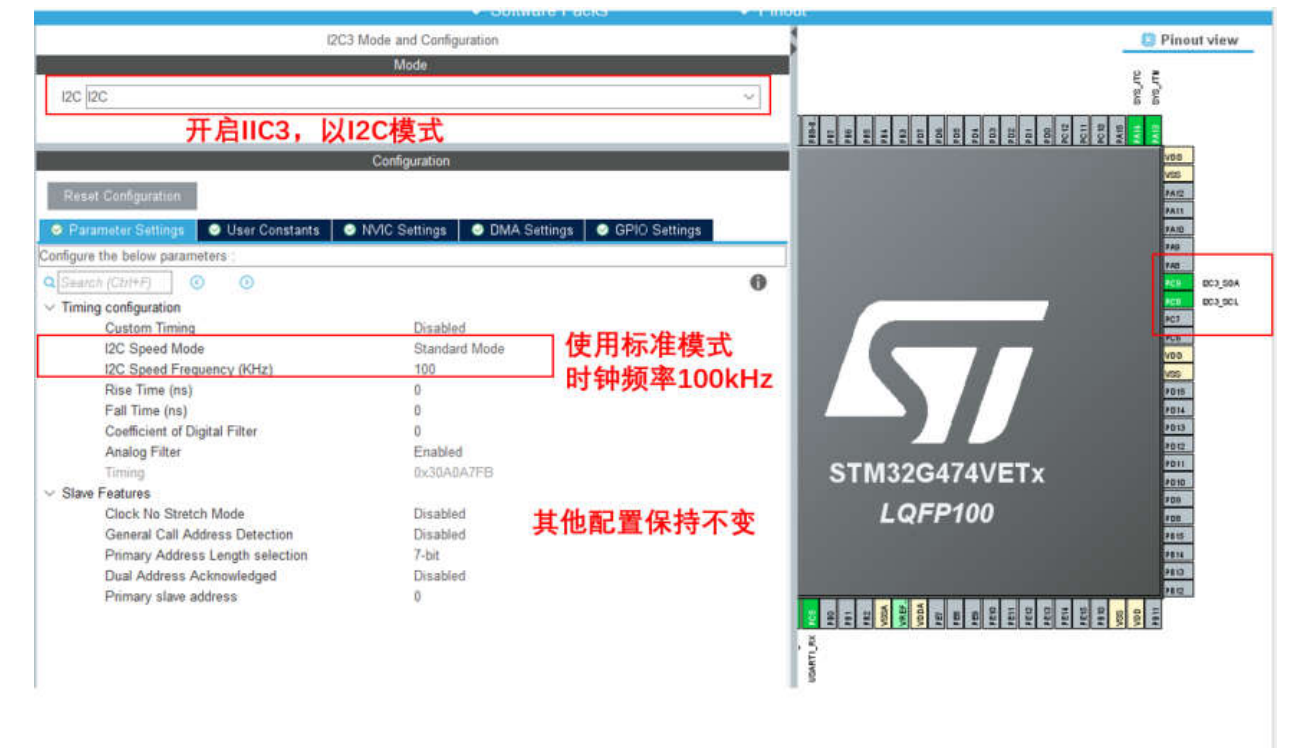
▲ CubeMX 进行 IIC 配置 本实验使用硬件 IIC,启用之后 IIC 的配置不需要改变。 相关操作函数说明: HAL_StatusTypeDef HAL_I2C_Mem_Write(I2C_HandleTypeDef *hi2c, uint16_t DevAddress,uint16_t MemAddress,uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout) 功能:以阻塞方式将一定量的数据写入指定的内存地址; 参数 1:I2C 句柄,根据实际需要填写; 参数 2:设备地址,注意这里填入的地址应该是左移一位之后的地址; 参数 3:目标内存的地址; 参数 4:目标内存的地址大小,可选 8 位(I2C_MEMADD_SIZE_8BIT),16 位(I2C_MEMADD_SIZE_16BIT); 参数 5:带发送数据的指针; 参数 6:待发送的数据量; 参数 7:发送超时时间; 返回:操作结果,HAL_OK,HAL_ERROR; 6 f6 e/ H0 G+ B# L+ h u0 X+ _ 示例: HAL_I2C_Mem_Write(&hi2c3,Addr_W,0x01,I2C_MEMADD_SIZE_8BIT,Data_T,DataSize,0xFF);//通过 IIC 向目标器件的 0x01 地址写入待发送数据; HAL_StatusTypeDef HAL_I2C_Mem_Read(I2C_HandleTypeDef *hi2c, uint16_t DevAddress,uint16_t MemAddress,uint16_t MemAddSize, uint8_t *pData, uint16_t Size, uint32_t Timeout) 功能:通过硬件 IIC 从一个特定的内存地址以阻塞模式读取一定量的数据; 参数 1:I2C 句柄,根据实际需要填写; 参数 2:设备地址,注意这里填入的地址应该是左移一位之后的地址; 参数 3:目标内存的地址; 参数 4:目标内存的地址大小,可选 8 位(I2C_MEMADD_SIZE_8BIT),16 位(I2C_MEMADD_SIZE_16BIT); 参数 5:带接收数据保存地址的指针; 参数 6:待接收的数据量; 参数 7:接收超时时间; 返回:操作结果,HAL_OK,HAL_ERROR,HAL_BUSY; 示例: HAL_I2C_Mem_Read(&hi2c3,Addr_R,0x01,I2C_MEMADD_SIZE_8BIT,Data_R,DataSize,0xFF);//通过 IIC 从目标器件的 0x01 地址读取数据; - w/ ?' \/ i3 y& g% x6 j, j# L4 D4 b% K2 t 核心代码: uint32_t i; printf(" 24C02 Test ....\r\n\r\n"); //向 0x01 内存地址写入数据 HAL_I2C_Mem_Write(&hi2c3,Addr_W,0x01,I2C_MEMADD_SIZE_8BIT,Data_T,DataSize,0xFF); printf(" 24C02 Write ok\r\n"); HAL_Delay(100); //从 0x01 内存地址读出数据 HAL_I2C_Mem_Read(&hi2c3,Addr_R,0x01,I2C_MEMADD_SIZE_8BIT,Data_R,DataSize,0xFF); printf(" 24C02 Read ok\r\n"); printf("24C02 Read Data : \r\n"); for(i = 0; i < DataSize; i++) printf("0x%02X ", Data_R); printf("\r\n\r\n"); if(memcmp(Data_T, Data_R, DataSize) == 0) { printf(" 24C02 Test OK\r\n"); } else { printf(" 24C02 Test Failed\r\n"); } 以上为 main 函数中外设初始化结束后的部分,通过硬件 IIC 向 24C02 内存地址写入一段设定好的数据,然后将这段数据读出,最后进行对比。 ! a& [8 g: z# z) `实验现象: 下载烧录后可以观察到上位机串口助手打印测试数据。 
▲ 实验现象 七、ADC实验 实验目的:掌握和熟悉 ADC 单路采集和多路采集的使用和配置方法,包含查询,中断,DMA等方式。 2 ~1 N+ ^1 [! j _8 C/ f* n5 p! \1、ADC 查询方式单路采集实验 ( l% Q& q1 i% |6 `; kCubeMX 配置如下,保存后生成对应的配置代码: 
▲ CubeMX 进行 ADC 配置 - ^ j- d6 G( O) y/ l2 m本实验进行单通道 ADC 软件触发采样,只需要对 ADC 进行简单配置即可,同时使用串口进行数据输出,串口与时钟系统配置上文已经展示,参照上文实验进行配置。 ' Y' N( |% s1 V+ b$ i相关操作函数说明: HAL_StatusTypeDef HAL_ADCEx_Calibration_Start(ADC_HandleTypeDef *hadc, uint32_t SingleDiff) 功能:对 ADC 进行校准; 参数 1:ADC 句柄,根据实际需要填写; 参数 2:ADC 采样模式,可选 ADC_DIFFERENTIAL_ENDED(差分采样模式)或ADC_SINGLE_ENDED(单端采样模式); 返回:操作结果,HAL_OK,HAL_ERROR; 示例:HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED); //对 ADC1 进行单端采样模式下的校准; 1 o' _8 Z) l& ^9 h9 ~' j: FHAL_StatusTypeDef HAL_ADC_Start(ADC_HandleTypeDef *hadc) 功能:使能 ADC,开启 ADC 规则组转换; 参数 1:ADC 句柄,根据实际需要填写; 返回:操作结果,HAL_OK,HAL_ERROR,HAL_BUSY; 示例:HAL_ADC_Start(&hadc1); //开启 ADC1 转换 注意:如果不是工作在连续模式,运行一次该函数进行一次转换 3 Z+ k" S, {& g) ~HAL_StatusTypeDef HAL_ADC_Stop(ADC_HandleTypeDef *hadc) 功能:关闭 ADC,停止 ADC 规则组转换; 参数 1:ADC 句柄,根据实际需要填写; 返回:操作结果,HAL_OK,HAL_ERROR; 7 e2 [0 O* w. B& M3 }- z5 |HAL_StatusTypeDef HAL_ADC_PollForConversion(ADC_HandleTypeDef *hadc, uint32_t Timeout) 功能:等待 ADC 规则组转换完成; 参数 1:ADC 句柄,根据实际需要填写; 参数 2:超时时间,单位 ms; 返回:操作结果,HAL_OK,HAL_ERROR,HAL_TIMEOUT; 示例:HAL_ADC_PollForConversion(&hadc1, 10); //等待转换完成 uint32_t HAL_ADC_GetValue(const ADC_HandleTypeDef *hadc) 功能:读取 ADC 规则组转换结果; 参数 1:ADC 句柄,根据实际需要填写; 返回:转换结果,ADC 采样寄存器值; 示例:ADC_Value = HAL_ADC_GetValue(&hadc1);// 读取转换的 AD 值 7 Q# f4 w7 N/ e' x1 F' z( A核心代码: HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED); //矫正 ADC while (1) { HAL_ADC_Start(&hadc1); //开启 ADC1 转换 HAL_ADC_PollForConversion(&hadc1, 10); //等待转换完成,第二个参数表示超时时间,单位ms if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1), HAL_ADC_STATE_REG_EOC)) ADC_Value = HAL_ADC_GetValue(&hadc1);// 读取转换的 AD 值 ADC_Vol = ADC_Value*3.3/4096;// 转换为电压 printf("ADC_Vol: %2.4f\r\n", ADC_Vol); //通过串口发送 HAL_Delay(50); } # [& Z; {/ p6 Q- ^以上为 main 函数中外设初始化结束后的部分,首先对 ADC 进行校准,然后进入主循环,循环中开启 ADC 转换,等待转换完成后读取转换结果,然后将结果转换为浮点数电压值,最后通过串口打印至 PC,每 50ms 进行一次测量。 8 o. T- |9 R- K( x# `5 H实验现象: 下载烧录后可以观察到上位机串口助手打印 ADC 测量数据。 
▲ 实验现象 . y4 c0 i- W9 m3 h2、ADC 中断方式单路采集实验 4 ?$ r- o1 l( D0 }8 {CubeMX 配置如下,保存后生成对应的配置代码: 
▲ CubeMX 进行中断配置 CubeMX 中的 ADC 基本配置与上例相同,这里需要开启 ADC1 的中断。 - q/ Y7 j W) X$ u6 X6 f相关操作函数说明: HAL_StatusTypeDef HAL_ADC_Start_IT(ADC_HandleTypeDef *hadc) 功能:使能 ADC,以中断开启 ADC 规则组转换; 参数 1:ADC 句柄,根据实际需要填写; 返回:操作结果,HAL_OK,HAL_ERROR; 示例:HAL_ADC_Start_IT(&hadc1); //开启 ADC1 转换 注意:在 ADC 转换完成之后会触发中断,中断中读取采样数据 HAL_StatusTypeDef HAL_ADC_Stop_IT(ADC_HandleTypeDef *hadc) 功能:关闭 ADC,停止规则组转换,关闭转换结束中断; 参数 1:ADC 句柄,根据实际需要填写; 返回:操作结果,HAL_OK,HAL_ERRORT; 核心代码: HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED); //矫正 while (1) { HAL_ADC_Start_IT(&hadc1); //中断方式启动 ADC HAL_Delay(50); } " s% _% ^* G/ W' N, ]: A以上为 main 函数中外设初始化结束后的部分,首先对 ADC 进行校准,然后进入主循环,循环中中断模式开启 ADC 转换,每 50ms 进行一次测量。 void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef *hadc) { if(hadc == &hadc1){if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1), HAL_ADC_STATE_REG_EOC)) ADC_Value = HAL_ADC_GetValue(&hadc1);// 读取转换的 AD 值 ADC_Vol = ADC_Value*3.3/4096;// 转换为电压 printf("ADC_Vol: %2.4f\r\n", ADC_Vol); //通过串口发送 } } ; u- J! K" f j3 h: U: Z; c/ b 以上为 ADC 转换完成中断回调函数,该函数为 ADC 共用的,进入此函数首先要判断是哪个 ADC 转换完成了,然后读取相应 ADC 的数据寄存器,转换为浮点数电压,通过串口发送到上位机。 $ G5 j s) Z# T/ N I+ V" Z2 ~实验现象: 下载烧录后可以观察到上位机串口助手打印 ADC 测量数据。 
▲ 实验现象 3、ADC 使用 DMA 方式单路采集实验 CubeMX 配置如下,保存后生成对应的配置代码: : j& m& B. A% c: q
▲ CubeMX 进行 ADC 配置 ( V! z: o- T. Z- |3 i' M" ~
▲ CubeMX 进行 DMA 配置 , U, z* j5 y% m$ a \% ZCubeMX 中的 ADC 基本配置需要开启连续转换模式,使能 DMA 请求,然后需要对 ADC1的 DMA 进行配置,使用连续传输模式,半字传输。 相关操作函数说明: HAL_StatusTypeDef HAL_ADC_Start_DMA(ADC_HandleTypeDef *hadc, uint32_t *pData,uint32_t Length) 功能:使能 ADC,通过 DMA 进行规则组转换; 参数 1:ADC 句柄,根据实际需要填写; 参数 2:ADC 数据读取数组指针,一般为数组首地址; 参数 3:DMA 传输长度; 返回:操作结果,HAL_OK,HAL_ERROR; 示例:HAL_ADC_Start_DMA(&hadc1,(uint32_t *)ADC_Value,ADC_BUFFER_SIZE);//开启 ADC,开始 DMA 传输; HAL_StatusTypeDef HAL_ADC_Stop_DMA(ADC_HandleTypeDef *hadc) 功能:关闭 ADC,停止 DMA 传输; 参数 1:ADC 句柄,根据实际需要填写; 返回:操作结果,HAL_OK,HAL_ERROR,HAL_BUSY; 示例:HAL_ADC_Stop_DMA(&hadc1);//停止 ADC 核心代码: if(HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED) != HAL_OK) //开始 ADC 校准 { Error_Handler(); } if(HAL_ADC_Start_DMA(&hadc1,(uint32_t *)ADC_Value,ADC_BUFFER_SIZE) !=HAL_OK) //开始 DMA 传输 { Error_Handler(); } 以上为 main 函数中外设初始化结束后的部分,首先对 ADC 进行校准,然后开启 ADC,使用 DMA 进行传输。 void ADC_DMA_Handle(void) { if(__HAL_DMA_GET_FLAG(&hdma_adc1,DMA_FLAG_TC1))//检查 DMA 传输完成标志 { __HAL_DMA_CLEAR_FLAG(&hdma_adc1,DMA_FLAG_TC1);//清楚 DMA 传输完成标志 HAL_ADC_Stop_DMA(&hadc1);//停止 ADC float ave_vol = 0;uint16_t all=0; for(uint8_t i = 0;i<ADC_BUFFER_SIZE;i++) { all += ADC_Value; } all = all/ADC_BUFFER_SIZE; ave_vol = 3.3f/4096*all; printf("ave_vol is %1.2f V \r\n",ave_vol); HAL_ADC_Start_DMA(&hadc1,(uint32_t *)ADC_Value,ADC_BUFFER_SIZE);//重启 ADC } } 以上为中断处理函数,需要添加到 DMA 中断中。当进入 DMA 传输完成中断之后,该函数先停止 ADC 采集,对上一轮 DMA 采集到的数据进行求均值,然后转换为相应的浮点电压发送到上位机,最后重启 ADC 转换。 $ C6 A2 @5 W- s0 kvoid DMA1_Channel1_IRQHandler(void) { ADC_DMA_Handle(); HAL_DMA_IRQHandler(&hdma_adc1); } " |9 M4 G& h6 D8 A 以上为 DMA 中断处理函数,在其中添加 ADC_DMA_Handle();。 实验现象: 下载烧录后可以观察到上位机串口助手打印 ADC 测量数据。 - {" J, K; a, x b l9 W! s
▲ 实验现象 ' I. p# [" i+ W2 f! I6 X/ y& q4、内部温度采集实验 8 f3 g1 B2 D, W2 z' Z9 H2 `CubeMX 配置如下,保存后生成对应的配置代码: 8 L% c: A: k+ Q" d
▲ CubeMX 进行温度传感器 ADC 配置 本实验进行内部温度传感器读取,需要注意采样时间需要给足,手册要求最小采样时间 5us,根据时钟频率进行换算。 相关操作函数说明: __HAL_ADC_CALC_TEMPERATURE(__VREFANALOG_VOLTAGE__,__TEMPSENSOR_ADC_DATA__, __ADC_RESOLUTION__) 功能:将内部温度传感器的 ADC 采样值转换为温度; 参数 1:ADC 参考电压,单位 mv; 参数 2:ADC 采样寄存器数据,注意是读取的原始数据; 参数 3:ADC 采样位数,可选 ADC_RESOLUTION_12B、ADC_RESOLUTION_10B、ADC_RESOLUTION_8B、ADC_RESOLUTION_6B; 返回:转换后的温度值; 示例: tem=__HAL_ADC_CALC_TEMPERATURE(vdda,ADC_Value,ADC_RESOLUTION_12B);//转换温度 ; e9 `1 i8 G. f核心代码: HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED); //矫正 while (1) { HAL_ADC_Start(&hadc1); HAL_ADC_PollForConversion(&hadc1, 10); //等待转换完成,第二个参数表示超时时间,单位ms if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1), HAL_ADC_STATE_REG_EOC)) ADC_Value = HAL_ADC_GetValue(&hadc1);// 读取转换的 AD 值 ADC_Vol = ADC_Value*3.3/4096;// 转换为电压 float tem; tem=__HAL_ADC_CALC_TEMPERATURE(vdda,ADC_Value,ADC_RESOLUTION_12B);//转换温度 printf("ADC_Vol: %2.4f V Tem: %2.4f ℃\r\n", ADC_Vol,tem); //通过串口发送 HAL_Delay(500); } 以上为 main 函数中外设初始化结束后的部分,首先对 ADC 进行校准,然后进入主循环,循环中开启 ADC 转换,等待转换完成后读取转换结果,然后将调用自带的温度转换函数将 ADC 采样值转换为温度,最后通过串口打印至 PC,每 500ms 进行一次测量。 实验现象: 下载烧录后可以观察到上位机串口助手打印温度测量数据。 
▲ 实验现象 5、VABT 电压采集实验 CubeMX 配置如下,保存后生成对应的配置代码: 
▲ CubeMX 进行 ADC 配置 本实验进行 VBAT 电压读取,基本配置与例 3.8.1 相同,需要注意采样时间需要给足,手册要求最小采样时间 12us,根据时钟频率进行换算。 核心代码: HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED); //矫正 while (1) { HAL_ADC_Start(&hadc1); HAL_ADC_PollForConversion(&hadc1, 10); //等待转换完成,第二个参数表示超时时间,单位 ms if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1), HAL_ADC_STATE_REG_EOC)) ADC_Value = HAL_ADC_GetValue(&hadc1);// 读取转换的 AD 值 ADC_Vol = 3*ADC_Value*3.3f/4096;// 转换为电压 printf("VBAT: %2.4f V \r\n", ADC_Vol); //通过串口发送 HAL_Delay(500); } 以上为 main 函数中外设初始化结束后的部分,首先对 ADC 进行校准,然后进入主循环,循环中开启 ADC 转换,等待转换完成后读取转换结果,然后将结果转换为浮点数电压值,需要注意的是,VBAT 采样在内部进行了 1/3 分压,因此最终电压计算结果需要乘 3,最后通过串口打印至 PC,每 500ms 进行一次测量。 / I+ ? F5 [5 m$ L( b2 z/ j实验现象: 下载烧录后可以观察到上位机串口助手打印 ADC 测量数据。 
▲ 实验现象 6 G% M/ R2 s5 V! F3 Z2 `5 c4 W; |6、内部基准电压采集实验 CubeMX 配置如下,保存后生成对应的配置代码: 
▲ CubeMX 进行温度传感器 ADC 配置 本实验进行内部参考电压读取,基本配置与例 3.8.1 相同,需要注意采样时间需要给足,手册要求最小采样时间 4us,根据时钟频率进行换算,读取之后通过内部参考电压反算外部参考电压。 相关操作函数说明: __HAL_ADC_CALC_VREFANALOG_VOLTAGE(__VREFINT_ADC_DATA__,__ADC_RESOLUTION__) 功能:通过读取到的内部参考电压,反算实际参考电压; 参数 1:ADC 采样寄存器数据,注意是读取的原始数据; 参数 2:ADC 采样位数,可选 ADC_RESOLUTION_12B、ADC_RESOLUTION_10B、ADC_RESOLUTION_8B、ADC_RESOLUTION_6B; 返回:转换后的时间参考电压,单位 mv; 示例:VREF_MV =__HAL_ADC_CALC_VREFANALOG_VOLTAGE(ADC_Value,ADC_RESOLUTION_12B);//转换 VREF+ , h4 Z, A7 c R1 O) B核心代码: HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED); //矫正 while (1) { HAL_ADC_Start(&hadc1); HAL_ADC_PollForConversion(&hadc1, 10); //等待转换完成,第二个参数表示超时时间,单位 ms if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1), HAL_ADC_STATE_REG_EOC)) ADC_Value = HAL_ADC_GetValue(&hadc1);// 读取转换的 AD 值 VREF_MV = __HAL_ADC_CALC_VREFANALOG_VOLTAGE(ADC_Value,ADC_RESOLUTION_12B);//转换 VREF+ printf("VREF+: %d mV \r\n", VREF_MV); //通过串口发送 HAL_Delay(500); } ( A! {7 k5 l3 L, P以上为 main 函数中外设初始化结束后的部分,首先对 ADC 进行校准,然后进入主循环,循环中开启 ADC 转换,等待转换完成后读取转换结果,然后将调用自带的电压转换函数将内部参考电压 ADC 采样值转换为实际外部参考电压输入,最后通过串口打印至 PC,每500ms 进行一次测量。 实验现象: 下载烧录后可以观察到上位机串口助手打印外部参考电压测量数据。 4 O/ O& b3 U* v, B W4 H 
▲ 实验现象 7、定时器触发单通道 ADC 采样 CubeMX 配置如下,保存后生成对应的配置代码: 
▲ CubeMX 进行 ADC 触发配置 
▲ CubeMX 进行定时器配置 
▲ CubeMX 进行中断配置 5 f( `7 n* E" F' ^, X( {1 _: ~CubeMX 中的 ADC 基本配置单通道采样相同,这里需要开启 ADC1 的中断,并且修改转换触发源,原来的软件触发改为使用定时器时间进行触发,TIM1 配置周期为 10ms,即每 10ms触发一次 ADC 转换。 相关操作函数说明: HAL_StatusTypeDef HAL_ADC_Start_IT(ADC_HandleTypeDef *hadc) 功能:使能 ADC,以中断开启 ADC 规则组转换; 参数 1:ADC 句柄,根据实际需要填写; 返回:操作结果,HAL_OK,HAL_ERROR; 示例:HAL_ADC_Start_IT(&hadc1); //开启 ADC1 转换 注意:在 ADC 转换完成之后会触发中断,中断中读取采样数据 HAL_StatusTypeDef HAL_ADC_Stop_IT(ADC_HandleTypeDef *hadc) 功能:关闭 ADC,停止规则组转换,关闭转换结束中断; 参数 1:ADC 句柄,根据实际需要填写; 返回:操作结果,HAL_OK,HAL_ERRORT; 核心代码: HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED); //矫正 HAL_ADC_Start_IT(&hadc1);//中断方式启动 ADC HAL_TIM_Base_Start(&htim1);//启动 TIM1 以上为 main 函数中外设初始化结束后的部分,首先对 ADC 进行校准,然后中断方式开启ADC 转换,这里主要是要开启 ADC 并且使能中断,然后开启 TIM1,通过 TIM 触发 ADC进行转换。 void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef *hadc) { if(hadc == &hadc1) { if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1), HAL_ADC_STATE_REG_EOC)) ADC_Value = HAL_ADC_GetValue(&hadc1);// 读取转换的 AD 值 ADC_Vol = ADC_Value*3.3/4096;// 转换为电压 printf("ADC_Vol: %2.4f\r\n", ADC_Vol); //通过串口发送 } } w, Z4 D! x! K以上为 ADC 转换完成中断回调函数,该函数为 ADC 共用的,进入此函数首先要判断是哪个 ADC 转换完成了,然后读取相应 ADC 的数据寄存器,转换为浮点数电压,通过串口发送到上位机。 0 Z* \% H+ w3 l2 f# j C* w. Q7 \6 X实验现象: 下载烧录后可以观察到上位机串口助手打印 ADC 测量数据。 
▲ 实验现象 九、DAC实验 # r P, Z0 ?( y; `' h4 o# H- l. X实验目的:掌握和熟悉 DAC 单路输出的软件触发和定时器触发配置方法,配合 DMA 输出波形。 3 q d7 ~' z; Z; s" T1、DAC 软件触发输出实验 CubeMX 配置如下,保存后生成对应的配置代码: 
▲ CubeMX 进行 DAC 输出配置 本实验进行软件触发 DAC 输出,开启 DAC1 的 OUT1 输出,使用外部输出引脚,使用普通模式,并且使能输出缓冲,将触发设置为软件触发。 ' d3 e- A' z' ~ N) P相关操作函数说明: HAL_StatusTypeDef HAL_DAC_SetValue(DAC_HandleTypeDef *hdac, uint32_t Channel,uint32_t Alignment, uint32_t Data) 功能:设置 DAC 输出电压; 参数 1:DAC 句柄,根据需要填写; 参数 2:DAC 通道,可选 DAC_CHANNEL_1、DAC_CHANNEL_2; 参数 3:DAC 数据格式,可选 DAC_ALIGN_12B_R(12 位右对齐)、DAC_ALIGN_12B_L(12 位左对齐)、DAC_ALIGN_8B_R(8 位右对齐); 参数 4:要写入的电压数据; 返回:操作结果,HAL_OK 或 HAL_ERROR; 示例:HAL_DAC_SetValue(&hdac1, DAC_CHANNEL_1, DAC_ALIGN_12B_R,sinewave[temp_i]);// 设置输出值注意:此函数不会改变实际的 DAC 输出,如果想要修改生效,还需要使用下面的函数 * O( D- a5 o( K, _8 k HAL_StatusTypeDef HAL_DAC_Start(DAC_HandleTypeDef *hdac, uint32_t Channel) 功能:开启外部 DAC 电压转换; 参数 1:DAC 句柄,根据需要填写; 参数 2:DAC 通道,可选 DAC_CHANNEL_1、DAC_CHANNEL_2; 返回:操作结果,HAL_OK 或 HAL_ERROR; 示例:HAL_DAC_Start(&hdac1,DAC_CHANNEL_1);// 改变输出值 . R b& N4 n* N# ?HAL_StatusTypeDef HAL_DAC_Stop(DAC_HandleTypeDef *hdac, uint32_t Channel) 功能:停止外部 DAC 电压转换; 参数 1:DAC 句柄,根据需要填写; 参数 2:DAC 通道,可选 DAC_CHANNEL_1、DAC_CHANNEL_2; 返回:操作结果,HAL_OK 或 HAL_ERROR; 核心代码: while (1) { for(temp_i=0; temp_i<60; temp_i++) { HAL_DAC_SetValue(&hdac1, DAC_CHANNEL_1, DAC_ALIGN_12B_R, sinewave[temp_i]);// 设置输出值 HAL_DAC_Start(&hdac1,DAC_CHANNEL_1);// 改变输出值 HAL_Delay(1);// 延时一毫秒 } } ; J f& K- p* ^, D; ~# Y8 ]+ y9 e以上为 main 函数中外设初始化结束后的部分,主循环中根据正弦表切换 DAC 电压输出,1ms 进行一次切换,正选表一共 60 个点。 3 _( a7 Z% Q: u4 m }- v实验现象:下载烧录后可以观察到 PA4 输出一个正弦波,频率约为 8.333Hz。 
▲ 实验现象 5 o3 G) Y9 O) z2、定时器触发 DMA 传输 DAC 输出实验 ( P/ O/ t( Q! W! m! T$ oCubeMX 配置如下,保存后生成对应的配置代码: 
▲ CubeMX 进行 DAC 基本配置 
▲ CubeMX 进行 DMA 配置 
▲ CubeMX 进行 TIM4 配置 本实验进行定时器触发 DAC 输出,开启 DAC1 的 OUT1 输出,使用外部输出引脚,使用普通模式,并且使能输出缓冲,将触发设置为 TIM4 触发,配置 DMA,使用循环模式,整字传输,配置 TIM4,设置定时器周期为 1ms。 ' f# H2 @5 k' S5 u' X2 i! C相关操作函数说明: HAL_StatusTypeDef HAL_DAC_Start_DMA(DAC_HandleTypeDef *hdac, uint32_t Channel,const uint32_t *pData, uint32_t Length,uint32_t Alignment) 功能:通过 DMA 方式开始 DAC 转换; 参数 1:DAC 句柄,根据需要填写; 参数 2:DAC 通道,可选 DAC_CHANNEL_1、DAC_CHANNEL_2; 参数 3:要通过 DMA 发送的数据指针,一般为数据首地址; 参数 4:要通过 DMA 发送的数据长度;参数 5:发送数据格式,可选 DAC_ALIGN_12B_R(12 位右对齐)、DAC_ALIGN_12B_L(12 位左对齐)、DAC_ALIGN_8B_R(8 位右对齐); 返回:操作结果,HAL_OK 或 HAL_ERROR; 示例:HAL_DAC_Start_DMA(&hdac1, DAC_CHANNEL_1,(uint32_t *)dac_wave1,SAWTOOTH_NB_STEPS,DAC_ALIGN_12B_R) ;// DMA 方式设置输出值 核心代码: //正弦表 uint32_t dac_wave1[80]={ 0x0826,0x08C6,0x0965,0x0A02,0x0A9C,0x0B31,0x0BC2,0x0C4C,0x0CD0,0x0D4C,0x0DC0,0x0E2B,0x0E8C,0x0EE2,0x0F2E,0x0F6E,0x0FA3,0x0FCC,0x0FE8,0x0FF8,0x0FFB,0x0FF1,0x0FDB,0x0FB9,0x0F8A,0x0F50,0x0F0A,0x0EB8,0x0E5D,0x0DF7,0x0D87,0x0D0F,0x0C8F,0x0C08,0x0B7A,0x0AE7,0x0A4F,0x09B4,0x0916,0x0876,0x07D5,0x0735,0x0696,0x05F9,0x055F,0x04CA,0x0439,0x03AF,0x032B,0x02AF,0x023B,0x01D0,0x016F,0x0119,0x00CD,0x008D,0x0058,0x002F,0x0013,0x0003,0x0000,0x000A,0x0020,0x0042,0x0071,0x00AB,0x00F1,0x0143,0x019E,0x0204,0x0274,0x02EC,0x036C,0x03F3,0x0481,0x0514,0x05AC,0x0647,0x06E5,0x0785}; //正弦表点数 #define SAWTOOTH_NB_STEPS 80 : H3 E& {6 l( w( N% a t5 U% Y 以上为正弦表定义。 if (HAL_TIM_Base_Start(&htim4) != HAL_OK)//开启定时器 4 { Error_Handler(); } if (HAL_DAC_Start_DMA(&hdac1, DAC_CHANNEL_1,(uint32_t *)dac_wave1,SAWTOOTH_NB_STEPS,DAC_ALIGN_12B_R) != HAL_OK) //开始 DMA 传输 { Error_Handler(); } + B5 ^/ u0 f% |# L以上为 main 函数中外设初始化结束后的部分,开启 TIM4 进行触发,以 DMA 方式开启DAC 转换输出。 % ]" M% T( K- B2 ]5 S实验现象: 下载烧录后可以观察到 PA4 输出一个正弦波,频率约为 12.5Hz。 
▲ 实验现象 w! W* w% O6 U7 n3、定时器触发 DAC 输出噪声实验 CubeMX 配置如下,保存后生成对应的配置代码: 
▲ CubeMX 进行 DAC 输出配置 
▲ CubeMX 进行 TIM2 配置 本实验使用 TIM2 触发 DAC 进行输出,输出内容由 DAC 随机生成,产生噪声。 ! X. M4 P; E" @核心代码: HAL_DAC_Start(&hdac1,DAC_CHANNEL_1);//启动 DAC 输出 HAL_TIM_Base_Start(&htim2);//启动 TIM2 触发 DAC 0 N8 S! j! g; m2 u: j# x4 d! Y 以上为 main 函数中外设初始化结束后的部分,只需要开启 DAC 输出和定时器即可。 9 F3 c, o5 x( Y4 _. h* f8 T. W实验现象: 下载烧录后可以观察到 PA4 输出随机噪声。 
▲ 实验现象 ' C2 ]9 k) d+ X: P) U% P如有侵权请联系删除 转载自:AI电堂+ j! J8 j" D% x2 D2 O8 F, x- W 5 E0 v) f7 X* k$ v* T |
 微信公众号
微信公众号
 手机版
手机版