 STMCU-管管
发布时间:2019-3-1 17:05
STMCU-管管
发布时间:2019-3-1 17:05
|
【外网项目分享】STM32 Blue Pill 物联网扩展板(上)+ w0 C7 Q, L0 ?; \2 e6 K) n ( F7 j# _+ T6 [ # @/ V. P: @( m9 X0 O6 f STM32现在是家庭智能网格兼容 什么是家庭智能网格?/ v! v1 m; O% }/ K) C % d1 R* h4 s6 Z, i' u- ~6 W' Q 正如在家庭智能网格Hackaday项目中所描述的,它是一个物联网网格框架,使用树莓派的定制射频传感器和中继器。它是开放源码的,可以与MQTT和OpenHAB2连接。 0 D4 m( j& i8 E! b mesh协议被设计得足够简单,这样您就可以在空闲时间自己理解并调试它,同时还具有实用的功能级别。在这个洪水网格项目日志中有关于网格协议的更多细节2 w/ a. Y/ D7 ~3 u" ^' l $ H: n8 j) y6 v8 s) u STM32的硬件支持 % n g# R+ C; z. J- {0 ?. @( [7 s
STM32应用程序 # @9 `: @& F) V: K$ l0 y8 U8 N
射频狗收集广播到网格中的信息6 o5 Q; X% F$ x7 ~7 e2 k 使用确认将目标消息加入到特定节点。请注意,确认是从目标到源的网格宽度,而不是像增强的Shockburst那样从一点到另一点。 现在,正如我们在下面几节中所看到的,STM32带来了使用ARM mbed的可能性以及它所带来的一切。: Z, X! j9 N- {8 \ 1 T' h1 M1 k/ B; h+ E/ D5 v 容易使用网格函数与ARM mbed和现代c++ 在这里,我们可以从RF uart接口中找到充当RF加密狗的代码片段。在github上完成文件. D2 [' [8 c' ?4 Q2 h //nRF Modules 1:Gnd, 2:3.3v, 3:ce, 4:csn, 5:sck, 6:mosi, 7:miso, 8:irq
这里,我们有一个节点应用程序的代码片段,它使用公认的对等消息。在github上完成文件6 w8 w4 H- d9 e" s6 s8 j void rf_message_to_me(uint8_t *data,uint8_t size)* r6 V9 @+ |2 s5 X' x
给自己弄个j-Link+ ]# O+ W- M: C6 n% a% a( R9 Q 像专业人员一样调试 " u6 A& i8 V7 M! [6 |; z) e; g- W
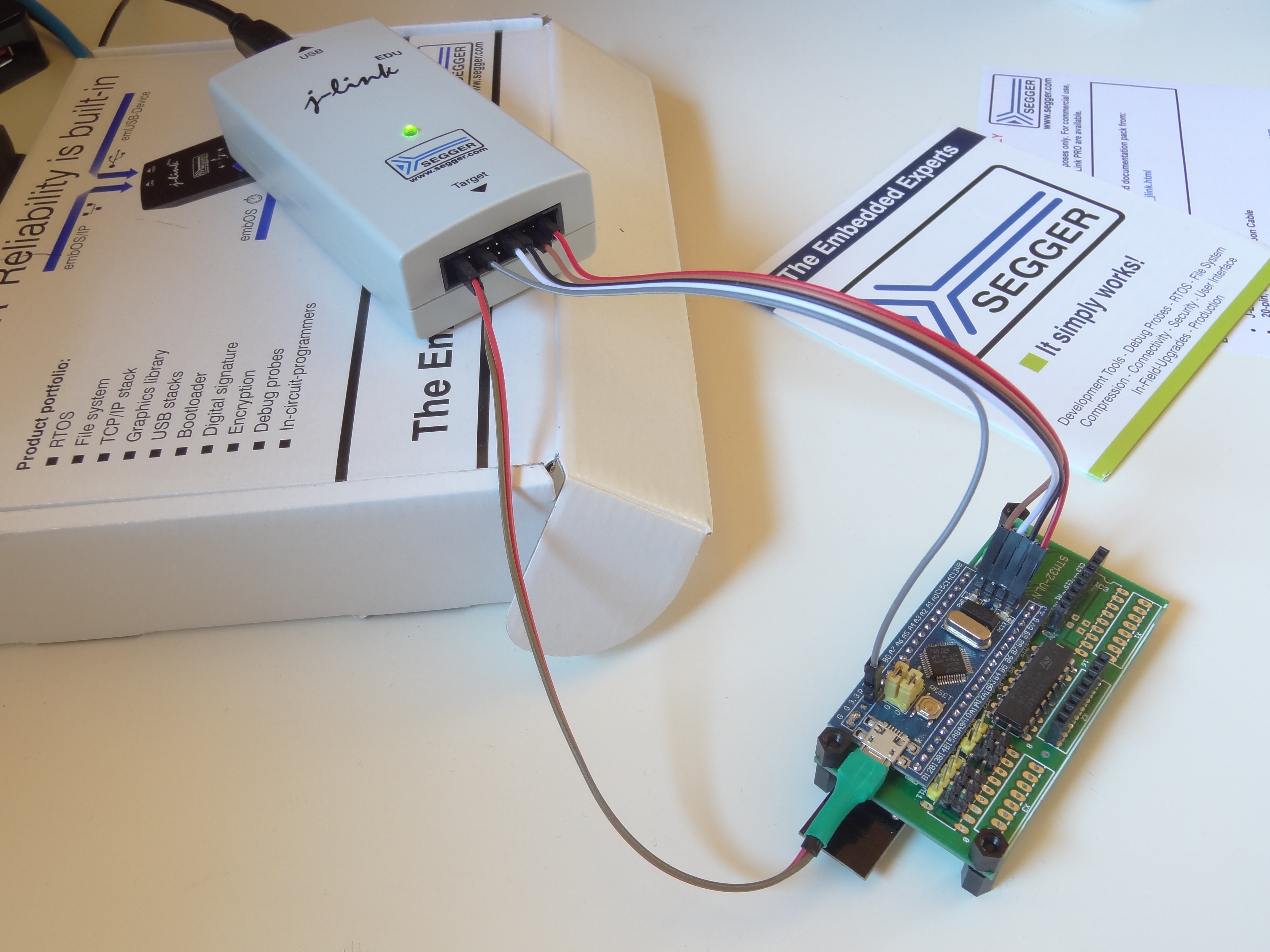 为什么是j-Link EDU ? 软件没有必要为诸如“它就是奏效的!”这样的理由争论太多。,这是真的,我试过了,也兼容了所有严肃开放的IDE,所以让我们更专注于比较9 Y4 d, s* D/ F/ F2 z" m' h3 N- r 与ST-Link相比,j-Link提供的VTref输入可以感知目标电压,因此可以使用它自动化脚本。; q' ~& a% T" S1 |( E9 f ) m8 ]7 p8 T9 ]; E+ [ 注意,埃杜是相对便宜(60€)使用仅供爱好者和教育,但有一个对于皮层M更便宜的EDU-mini(16€)。 EDU比mini有更高的下载速度,支持更多的CPU变体。 2 \) I5 y/ D- X' { 它可以控制电源高达300毫安5V完全关闭目标,这是非常重要的测试自动化,因为它不同于复位。 ) a& L: x, D# P7 L+ ]) e( M 它有一个虚拟UART,而不是从ARM cortext中提升,但是您可以使用外部UART保持您的ARM程序不被修改,并将其连接到调试器的外部插脚。 所以你可以试用,调试器,电源控制,电压传感和UART/ [8 a- W: s' z( t segger设备的安全性正在提高,所以您不必担心在SW更新之后克隆会停止工作。 ! {6 w9 U$ u( Q9 E 从这里去哪里, [9 l4 t7 e$ X& h I0 { 6 s* D3 k$ a, M3 D- J* q7 b 我将开始更新我的脚本和环境使用j-Link edu,我将打破与ST-Link实用程序的兼容性。3 M) s% A1 D& ]2 J: d# @ 我将评估调试器接口Ecpilse和segger特定的/ D6 `( B" e5 |- C2 ^9 }$ U " P# T& I- e R5 ` 我将开始使用python包装调试接口,使其快速且可访问 ( N6 Y3 Q. S" { 感觉无刷直流速度和位置控制' M' _/ q4 V4 G; V 实验设置" I8 J) @3 f. Q9 N* V; E 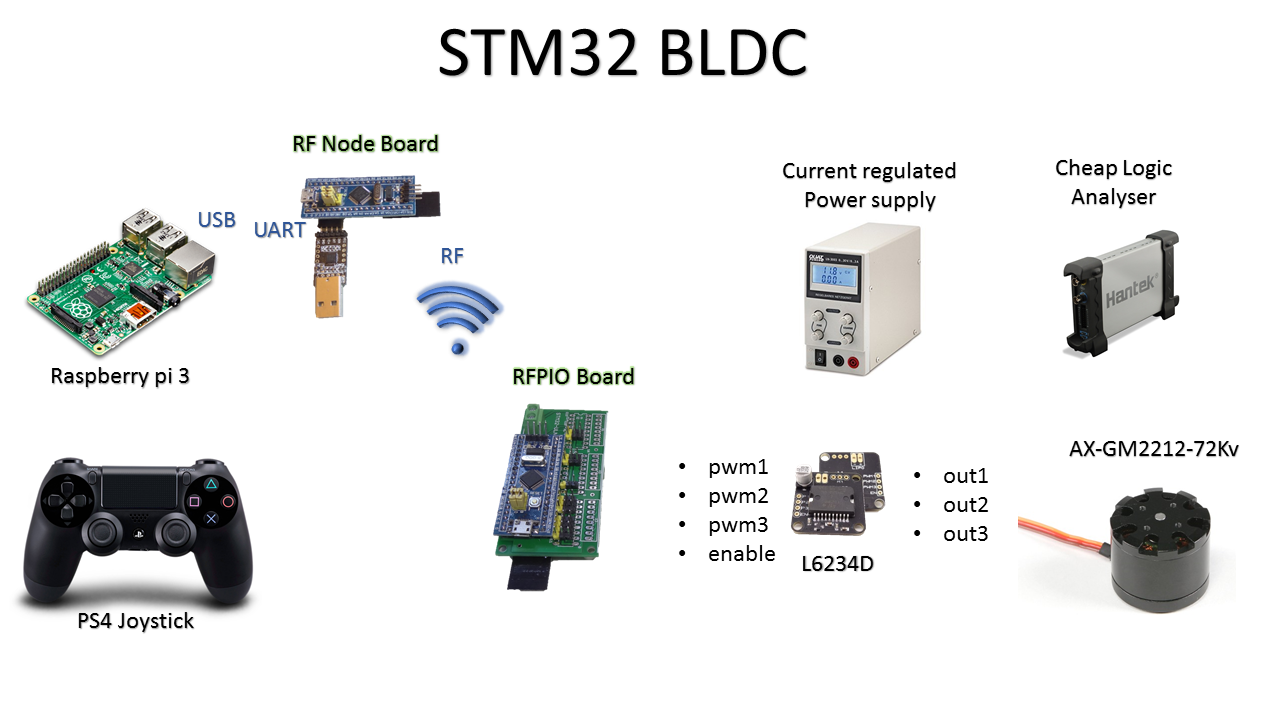
注意安全:3 R% M% M5 h9 K$ m% O 3 [# \' J' P4 a% ^9 O 使用带有实验控制器的普通电池是危险的,可能会导致测试台着火。使用保险丝、限流电源或可靠的控制器。+ \( q* z, S* Q! `9 d1 \) a
演示 这个演示中有趣的部分不是第一次旋转bldc的革命,而是:
开环控制:BLDC =步进电机
控制参数 4 x# ~/ I% D; s每一个关于BLDC控制的新视频或图表都能让我理解更多的东西,这就是为什么尽管互联网上有大量的文档和教程,为什么不添加另一个简单的视图。 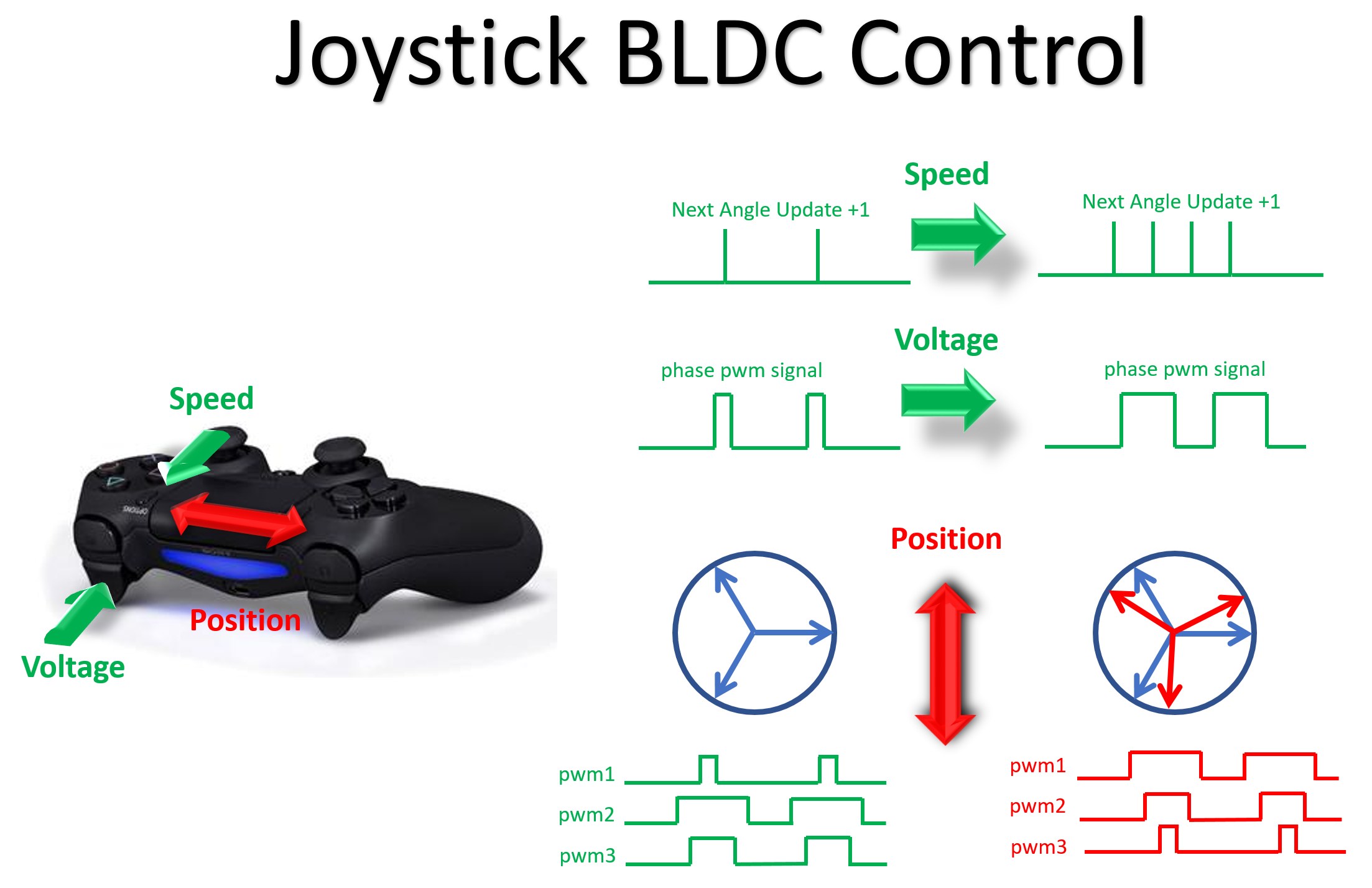
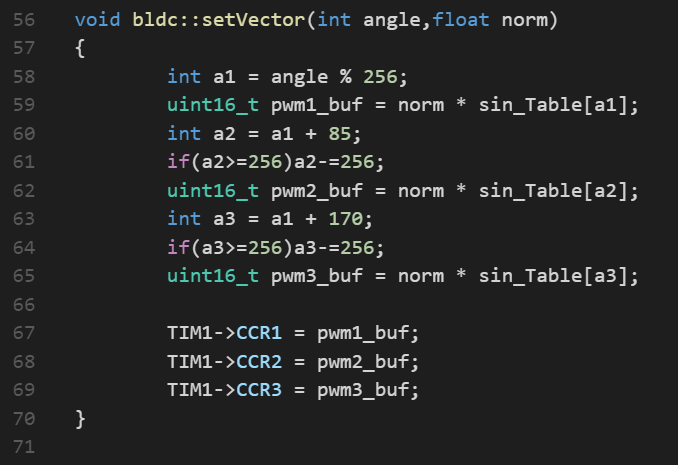 抱歉把源代码作为图片,但源代码插件是如此菜了,代码几乎无法阅读,所以我保持VSCode的颜色。" d& P# Y* s4 G* @3 K. Z# C 神奇的地方就是,角度为int,让它更简单,我甚至不使用一个合适的单位作为放射微粒或学位,而256°256/360单位适合表窦porecessed一旦和存储为查找。 , [$ X! P( V6 ^# C! s" A' C: R + U! \# |$ `/ d- F6 g 当M3以72MHz运行时,对浮点数的实时计算花费了7.2 us,而这里的查找函数只花费了大约1 us,所以对于50 us pwm周期= 20 KHz(最大控制刷新率)来说,这仍然是值得的。 0 [: c$ g2 U) t" M! m9 d' z$ }; d$ l2 E 7 Q1 W/ n0 G, E. f0 ` 请注意,L6234D可以高达150千赫从死开关时间的观点。 ) ?- ]8 V4 Q( I8 _3 s' m- A N" U- S, n7 c2 a- P, j- ? 我使用mbed-os作为开发环境,为什么要这么复杂的使用它呢? PwmOut pwm1; 这很利于开箱即用的配置和初始化。它可以为您做任何事情,从cmsis HAL api调用到计算应该将哪些引脚分配给哪些替代函数。它配置pwm模式,所有堆栈都要经过赋值运算符的重载,这会使函数时间从微秒变为毫秒。& V8 ~% v/ W. _, `" h1 r # j$ T9 q: y* q- `* N 这就是为什么寄存器的直接使用是围绕一条指令的。 信号) {/ d8 N- u6 ^+ Z2 P 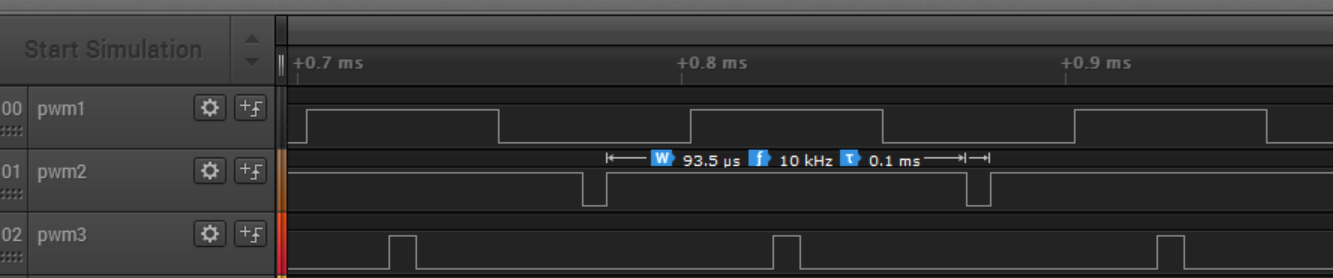
/ l/ I# J3 V6 h( Y7 g2 O1 x* ~ 结论 一旦你同时控制了速度和电压,你就能更好地了解电机什么时候停了,什么时候没踩踏板,你可以按住它,施加更高的电压,看它什么时候能克服施加的扭矩。这不是科学,但是可以让你更加随意的处理其他科学公式。$ \ M" p/ I0 n& H( t 2 I/ A5 b$ F9 {5 X) q1 C2 Y. ] 下一步是查看扭矩控制回路,然后可能是反电动势监控,为BLDC设计一个特定的扩展板,并在面向现场的控制视频前进行冥想。但可以肯定的是,对于我的倒立摆移动机器人的计划来说,这种控制已经足够了。! |7 N9 u9 Z% J8 M& V" V [ r! N4 r' ^2 |; F 即将到来&创意 4 ^) r; ~- x! v4 |$ g; G 带有传感器的射频节点已经启动并运行,RFPIO已经启动并运行,是时候考虑下一步应该做什么了。 $ g( B+ n8 W7 M( R4 f
实验见hello_超声样本。9 D2 n( \9 V' G 扩展板应该为多个超声波传感器提供准备就绪的连接输出( U1 ]+ K- T& w
使用L6234 PowerSo20模块或稍后一些较低的电流L6234直接浸在同一块板上。8 L8 G; h1 q2 D0 t( S
+ \& C. ^9 t# X' K% o$ F) y 0 e" [" L [4 r% O 来源>>9 j- U$ g6 L5 b: R4 g5 N |
意法半导体与高通达成无线物联网战略合作
《RT-Thread设备驱动开发指南》书籍学习记录
[STM32WB55评测] 开箱
【我心中的STM32WBA52】
【我心中的STM32WBA52】
将STM 32 Lora DiscoveryKit连接到AWS物联网(三)
【STM32】STM32G030C8T6 开发板分享
STM32线上技术周回顾|Day3 智能物联答疑汇总
IAR ETM Trace提供哪些调试功能
物联网STM32开发板套件通过互联网与云服务器通信源程序
 微信公众号
微信公众号
 手机版
手机版









