|
使用pwm输出是首先要看,那个引脚使用可以使用pwm输出。 高级控制和通用定时器通道引脚分布 选择TIM5CH2 1、GPIO配置输出 - <font face="微软雅黑" size="3">static void TIM_GPIO_Config(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
-
- // 输出比较通道1 GPIO 初始化
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
-
- }
- </font>
2、定时器配置 - <font face="微软雅黑" size="3">
- /************通用定时器TIM参数定义,只限TIM2、3、4、5************/
- // 当使用不同的定时器的时候,对应的GPIO是不一样的,这点要注意
- // 我们这里默认使用TIM5
-
- #define GENERAL_TIM TIM5
- #define GENERAL_TIM_APBxClock_FUN RCC_APB1PeriphClockCmd
- #define GENERAL_TIM_CLK RCC_APB1Periph_TIM5
-
- // TIM5 输出比较通道2
- #define GENERAL_TIM_CH2_GPIO_CLK RCC_APB2Periph_GPIOA
- #define GENERAL_TIM_CH2_PORT GPIOA
- #define GENERAL_TIM_CH2_PIN GPIO_Pin_1
- ////////////////////////////////////////
-
-
-
- //5khz
- #define GENERAL_TIM_Period (20-1) //计数个数ARR
- #define GENERAL_TIM_Prescaler (720-1) //周期 分频数PSC
- // 占空比配置
- uint16_t CCR1_Val = 10;
- static void TIM_Mode_Config(void)
- {
- // 开启定时器时钟,即内部时钟CK_INT=72M
- GENERAL_TIM_APBxClock_FUN(GENERAL_TIM_CLK,ENABLE);
-
- /*--------------------时基结构体初始化-------------------------*/
- /*--------------------定时器基本配置-------------------------*/
- // 配置周期,这里配置为XXK
-
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- // 自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断
- TIM_TimeBaseStructure.TIM_Period=GENERAL_TIM_Period;
- // 驱动CNT计数器的时钟 = Fck_int/(psc+1)
- TIM_TimeBaseStructure.TIM_Prescaler= GENERAL_TIM_Prescaler;
- // 时钟分频因子 ,配置死区时间时需要用到
- TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
- // 计数器计数模式,设置为向上计数
- TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
- // 重复计数器的值,没用到不用管
- TIM_TimeBaseStructure.TIM_RepetitionCounter=0;
- // 初始化定时器
- TIM_TimeBaseInit(GENERAL_TIM, &TIM_TimeBaseStructure);
-
- /*--------------------输出比较结构体初始化-------------------*/
- /*--------------------PWM输出配置-------------------*/
-
- TIM_OCInitTypeDef TIM_OCInitStructure;
- // 配置为PWM模式1
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
- // 输出使能
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
- // 输出通道电平极性配置
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
- // 输出通道空闲电平极性配置
- TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;
- // 输出比较通道 2
- TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
- TIM_OC2Init(GENERAL_TIM, &TIM_OCInitStructure);
- TIM_OC2PreloadConfig(GENERAL_TIM, TIM_OCPreload_Enable);
-
-
- // 使能计数器
- TIM_Cmd(GENERAL_TIM, ENABLE);
-
- // 主输出使能,当使用的是通用定时器时,这句不需要
- //TIM_CtrlPWMOutputs(GENERAL_TIM, ENABLE);
-
-
- }</font>
3、调用函数使用 - <font face="微软雅黑" size="3">void PWM_Init(void)
- {
- TIM_GPIO_Config();
- TIM_Mode_Config();
- //外面使用这个控制函数控制占空比
- //TIM_SetCompare2(GENERAL_TIM , 70);
- }
-
-
- void pwm_test(void)
- {
-
- GPIO_ResetBits(MOTOR1EN_GPIO_PORT, MOTOR1EN_GPIO_PIN);
- TIM_SetCompare2(GENERAL_TIM , 5);
- Delay_s(4);
- GPIO_SetBits(MOTOR1EN_GPIO_PORT, MOTOR1EN_GPIO_PIN);
- Delay_s(2);
-
-
- GPIO_ResetBits(MOTOR1EN_GPIO_PORT, MOTOR1EN_GPIO_PIN);
- TIM_SetCompare2(GENERAL_TIM , 15);
- Delay_s(4);
- GPIO_SetBits(MOTOR1EN_GPIO_PORT, MOTOR1EN_GPIO_PIN);
- Delay_s(2);
-
- }</font>
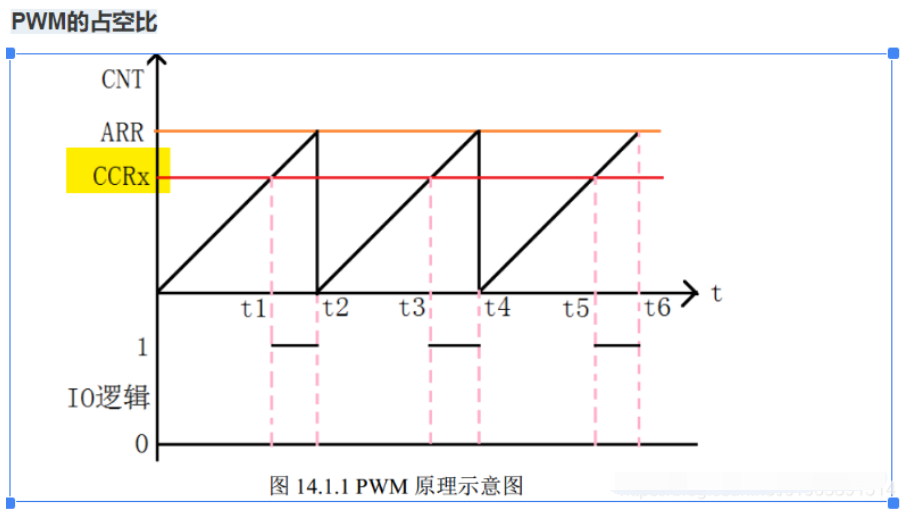
初次易错点: 1,没有注意到相应的输出比较通道。使用的是ch2,但是函数调用的却是ch1的 TIM_SetCompare1/TIM_SetCompare2/TIM_SetCompare3/TIM_SetCompare4 TIM_OC1Init/TIM_OC2Init/TIM_OC3Init/TIM_OC4Init TIM_OC1PreloadConfig/TIM_OC2PreloadConfig/TIM_OC3PreloadConfig/TIM_OC4PreloadConfig 2、pwm更改占空比 #define GENERAL_TIM_Period (20-1) //计数个数ARR // 自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断 #define GENERAL_TIM_Prescaler (720-1) //周期分频数PSC // 驱动CNT计数器的时钟 = Fck_int/(psc+1) TIM_Period:定时器周期,实际就是设定自动重载寄存器 ARR 的值, ARR 为要装载到实际自动重载寄存器(即影子寄存器) 的值,可设置范围为 0 至 65535。
TIM_Pulse:比较输出脉冲宽度,实际设定比较寄存器 CCR 的值,决定脉冲宽度。可设置范围为 0 至 65535。
TIM_SetCompare1(TIMx,CCRx);设置pwm占空比
| .png) STMCU小助手
发布时间:2021-7-16 16:18
STMCU小助手
发布时间:2021-7-16 16:18


 微信公众号
微信公众号
 手机版
手机版