.png) STMCU小助手
发布时间:2021-7-15 14:11
STMCU小助手
发布时间:2021-7-15 14:11
|
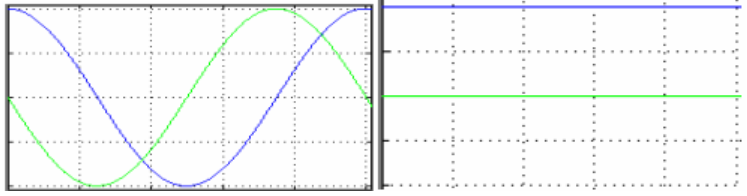
park变换 该变换将平衡两相正交平稳系统中的矢量变换为正交旋转坐标系。 数学公式: 
跟着转子旋转的“d-q”坐标系成功把cos,sin正余弦信号转化线性的了。 theta角度是由位置传感器得到的已知变量。 
TI的实现 也是很简单的两句计算,cos和sin(theta)是外部计算传入参数。对于三角函数,TI有自己的库去计算。 而cos和sin(theta)不止只有在park中使用,其他地方也会使用,在这函数中再计算一次,未免多花时间了。st的库即比较麻烦。
ST的库: ST的代码写很“规矩”,一步一步的。有很多限幅检测。 在对theta求角度的查表法也绕了一下。解决浮点计算,统一后,全使用int型的。
|

【G431RB+IHM16M1】使用Motor Pilot Profiler工具识别未知参数电机
创新电机控制技术在暖通空调及液体冷却系统中的应用(文末有福利)
意法半导体发布机器学习软件包,加快AI增强型电机控制研发
意法半导体发布GaN参考设计,面向家电与工业驱动电机控制应用
AI赋能电机控制!这套开发套件,让智能升级零门槛
STM32 ZeST+HSO:无传感器电机控制的零速全扭矩突破
意法半导体伺服驱动:机器人电机控制的“硬核”解决方案,从高压到低压全覆盖(上)
采用STSPIN32G4的高功率密度伺服电机驱动器模块化方案
汽车电机控制应用面临的两大全新挑战以及我们采取的应对措施
有奖直播 | 应用于热管理系统(HVAC、BESS、AI数据中心)的电机控制方案
 微信公众号
微信公众号
 手机版
手机版