.png) STMCU小助手
发布时间:2021-11-25 15:00
STMCU小助手
发布时间:2021-11-25 15:00
|
有刷电机驱动电路 有刷电机是电机里面最简单,也是历史最悠久的一种,到现在仍然广泛应用于各个领域。他的控制很简单,在电机的两个电极加正向电压,则正向旋转,如果加反向电压,则旋转方向也反过来。电机的转速可以通过控制加在电极上的电压来调节。 在电机控制电路中最常用的器件就是 MOS 管了。可以分为两个大的类型:P 沟道 MOS 和 N 沟道 MOS。MOS 管可以简单的理解为一个自来水阀门,Gate 是控制端,调节 Drain 和 Source 端之间流过的电流大小。 
下面是两种 MOS 的典型用法。P 沟道的 MOS 一般 S 接电源正极,然后 Vgs 需要一个负电压来打开电流通道,而 N 沟道的 S 极一般接电源的负极,Vgs 需要一个正电压来打开电流通道。 

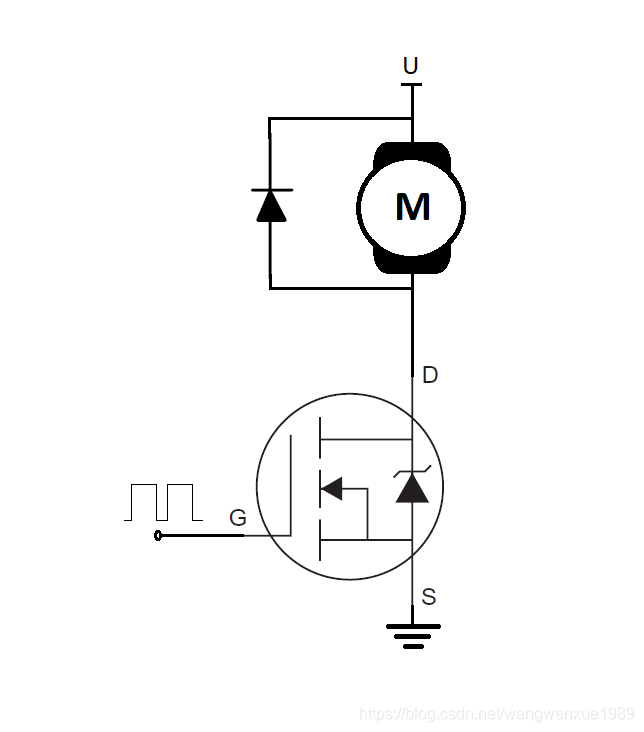
资料来源于 IOR 公司数据手册 我们先从一个最简单的驱动电路开始。单片机控制 MOS 管栅极为高时,电流从电源经过电机和 MOS 管到地。当栅极为低时,MOS 管断开,此时电机线圈内的电流继续通过续流二极管回流电机的正极。我们通过调节栅极控制端的PWM占空比,就可以控制电机的转速。 
1.TIM模块 TIM 模块最重要的三个寄存器是: Counter Register (TIMx_CNT) 计数寄存器 Auto-Reload Register (TIMx_ARR) 重置寄存器 Capture/compare mode register 1 (TIMx_CCMRx) 输入捕获/输出比较寄存器 
Counter 在时钟的驱动下计数 Auto-Reload 设定计数的最大限制值 Capture/Compare 锁存一个事件发生时的计数值到Capture/计数达到 Compare 值后触发一个事件 在 PWM 模式下,Auto-Reload 寄存器设定PWM的周期,Compare 设定占空比。 有一点需要注意的是一个 TIM 模块只有一个计数器和一个重置寄存器,而有多个输入捕获/输出比较寄存器。所以一个 TIM 模块的多个通道可以设置不同的占空比,但周期都是相同的。 所以我们在选用 MCU 的时候,如果需要产生多种周期的 PWM,不仅要看它的定时器模块一共有多少通道数,还要看是否有足够的独立 TIM 模块。 2.代码 我们在下面这个工程的基础上修改来实现用一个可调电阻控制PWM占空比,来控制电机的转速。 STM32Cube_FW_F0_V1.11.0\Projects\STM32F030R8-Nucleo\Examples\TIM\TIM_PWMOutput\MDK-ARM\Project.uvprojx 这个工程默认使用TIM3模块输出4路PWM,我们可以只保留其中一路。 然后把ADC采样的代码添加进来: Step 1: stm32f0xx_hal_conf.h #define HAL_ADC_MODULE_ENABLED Step 2: main.h 添加ADC相关宏定义 
Step 3: stm32f0xx_hal_msp.c 添加ADC使用的引脚的初始化代码 
Step 4: 把ADC的驱动文件添加进工程,在主程序初始化ADC。 
Step 5: 读取 ADC 的值,写入 TIM 的 CCR 寄存器,观察 PWM 占空比的变化。根据电机的特性,还可能需要改变 PWM 的周期。 
如果需要参考代码,可以在 Github 搜索 TopSemic 找到。 |
【评分有奖】STM32 AI Sidekick聊天工具上线,快来体验一下吧!
ST TouchGFX 实操系列视频+如何选择正确的帧缓冲区策略
ST TouchGFX 实操系列视频++如何添加图像
ST TouchGFX 实操系列视频+如何进行屏幕转换
ST TouchGFX 实操系列视频+控件的淡入淡出
ST TouchGFX 实操系列视频+移动控件的三种方法
ST TouchGFX 实操系列视频+如何创建用户界面(UI)
ST TouchGFX 实操系列视频+如何安装TouchGFX Designer和STM32Cube软件环境
【经验分享】STM32F1 GPIO工作原理
【经验分享】STM32F0xx_DMA收发USART数据配置详细过程
 微信公众号
微信公众号
 手机版
手机版