.png) STMCU小助手
发布时间:2022-2-9 22:04
STMCU小助手
发布时间:2022-2-9 22:04
|
那输入捕获可以用来干嘛呢??这个问题问的好,输入捕获可以用来测量脉冲宽度或者测量频率,假如要捕获一个脉冲的高电平脉宽,我们要怎么做呢??别急哈、、接下来我们从头慢慢的分析到脚、、 据老夫所知:STM32的输入捕获,就是通过检测通道上的边沿信号,在边沿信号发生跳变(比如说突然来个上升沿或者下降沿),计数器就把此刻的计数值存放到对应通道的捕获比较寄存器,就这样、、就捕捉到了“美女”、话是这么说、、可操作起来不仅仅是几句话、因为初始化和对捕获的处理是不一样的、所以,为了做好迎接捕获的准备,我们来介绍下几个比较陌生的位: 对于定时器的一些寄存器,在之前的博客都有涉及到,如 TIMx_CR1, 捕获/比较模式寄存器1(TIMx_CCMR1), 捕获/比较使能寄存器(TIMx_CCER), 计数器(TIMx_CNT) 预分频器(TIMx_PSC) 自动重装载寄存器(TIMx_ARR) 捕获/比较寄存器1(TIMx_CCR1) 我们再来看看捕获/比较模式寄存器1(TIMx_CCMR1),由于我们是用TIM5_CH1,所以该寄存器中 CC1S[1:0]:捕获/比较1选择 (Capture/Compare 1 selection)我们选择01:CC1通道被配置为输入,IC1映射在TI1上;这个知道为啥是TI1吗??请看我那销魂美丽的涂鸦: 
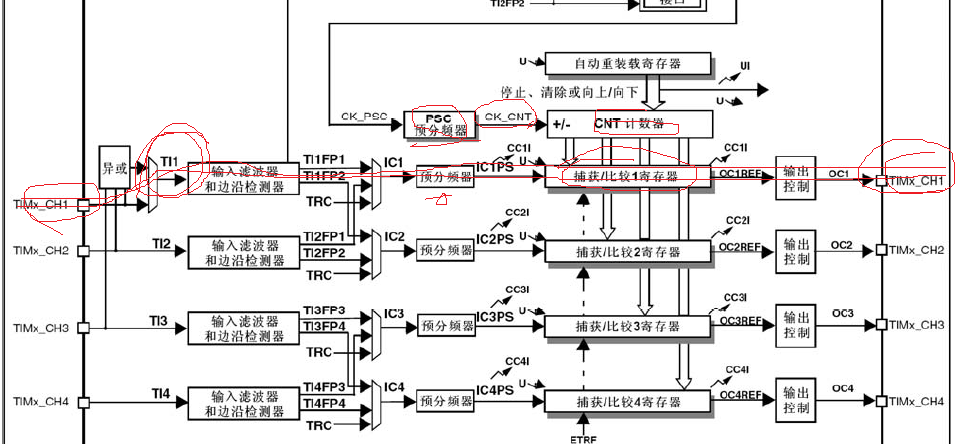 这里我们检测高电平的宽度,所以我们检测的时候只要遇到上升沿就触发捕获一次,但是我们要怎么设置呢,请看这几位: IC1PSC[1:0]:输入/捕获1预分频器 (Input capture 1 prescaler)00:无预分频器,捕获输入口上检测到的每一个边沿都触发一次捕获; 神奇吧,好了,IC1F[3:0]:输入捕获1滤波器 (Input capture 1 filter)(这个就是上图中的输入滤波器,在这里我们不做滤波处理,为什么,请看以下解释) 在这里解释下:数字滤波器由一个事件计数器组成,它记录到N个事件后会产生一个输出的跳变:这个N可以取值具体参考中文手册,意思是说:我采样高电平,只有连续采样到N个电平是高电平的话我才认为是有效的高电平,低于N个我就认为是无效的、在这篇博客里,我们只要是采样到高电平就行,所以这里就不采用数字滤波。 我们来看看这个寄存器 捕获/比较使能寄存器(TIMx_CCER),要使捕获使能,我们就需要设置使能位 CC1E:输入/捕获1输出使能 (Capture/Compare 1 output enable)为0; 对于我们输入捕获后要处理的我们交给我们的中断,所以在这里我们要开启中断使能位 DMA/中断使能寄存器(TIMx_DIER) CC1IE:允许捕获/比较1中断 (Capture/Compare 1 interrupt enable)为1; 介绍了以上几位大神,接下来,我们要怎么个思路呢??==当我们捕获到上升沿时,我们把此时的CNT中的值读出来,然后等待下降沿的到来,这时候要分为两种情况: 第一:下降沿来了,我们就记录此刻CNT的值,(捕获值)然后重复以上动作 第二:下降沿没来,可是这时候定时器的计数值已经到了,也就是要溢出了,这时候要特殊处理下,也就是直接把计数值返回 (注:在这里,要注意捕获值跟计数值的差别,他们是不一样的、)至于为什么不一样,大家可以思考思考、、 所以我们将两次捕获的值相减,(下降沿的值减去上升沿的值)就可以得到高电平的脉宽了、、而这些事,我们都在中断服务函数里处理(中断喔、、想起没??要做什么知道吧、、注意,这时候有两个中断触发:更新中断和捕获中断,更新中断用来处理定时器计数溢出,捕获中断用来处理捕获事件) 接下来,我们看看我们具体的实现步骤 1:开启挂载在ABP1的TIM5时钟,开启挂载在ABP2的GPIOA的时钟,并初始化TIM5和GPIOA,由于这两个初始化前几篇博客有涉及到,故直接贴出代码:
2、设置TIM_CH1的输入捕获功能,打开“stm3210x.tim.h”我们可以看到
根据我们以上的了解,我们设置,请看以下代码:
3、设置中断优先级、在这里比较简单,直接看代码:
4.使能中断并开启定时器
5、编写中断服务函数
6、注意红色标注部分,好好理解刚开始说的计数值和捕获值的区别、还有
7、到这里,我们需要在主函数里稍微写下:
8、好了,至于我标题说的小应用,也就是把我们上次PWM的输出给这次的输入捕获,大家通过串口就可以看到高电平的脉宽了。当然,在这篇博客的程序里也需要保留上次PWM输出的程序方可、、 |
【福利三:逢7发帖赢大礼】4、基于STM32G070板子SPI flash 移植SFUD库
【福利三:逢7发帖赢大礼】基于STM32G070板子的uart shell移植设计
【福利三:逢7发帖赢大礼】3、基于STM32G070板子的YModem串口协议通信
【福利三:逢7发帖赢大礼】2、基于STM32G070板子的OLED移植U8G2库
实战经验 | ClassB功能安全认证代码与应用代码分区的实现要点
STM32G0 系列 I2C 通信异常典型案例分析与解决方案总结
经验分享 | LAT1490 两个STM32G0 I2C 通信异常的案例分析
经验分享 | STM32G0 I2C bootloader Go 命令后调试连接失败:DBG_SWEN 位复位修复
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
 微信公众号
微信公众号
 手机版
手机版










