AutoRetransmission 设置为enable 可以防止通讯速度过快时丢包

下图所示的TxBuffersNbr 和 TxFifoQueueElmtsNbr 貌似是共享32个地址的,两者加起来不能超过32

1.设置硬件参数(引脚,时钟)
1.1 启用FDCAN1,并设置参数
启用FDCAN后参数设置如下:
设置FDCAN引脚,手头板子tx rx分别为PH13 PI9

设置参数

其中elmets Size因为采用classicmode 所以选用8bytes,注意 buffers nbr MP157rx和tx最多有32个buffer,offset貌似不设置也没事
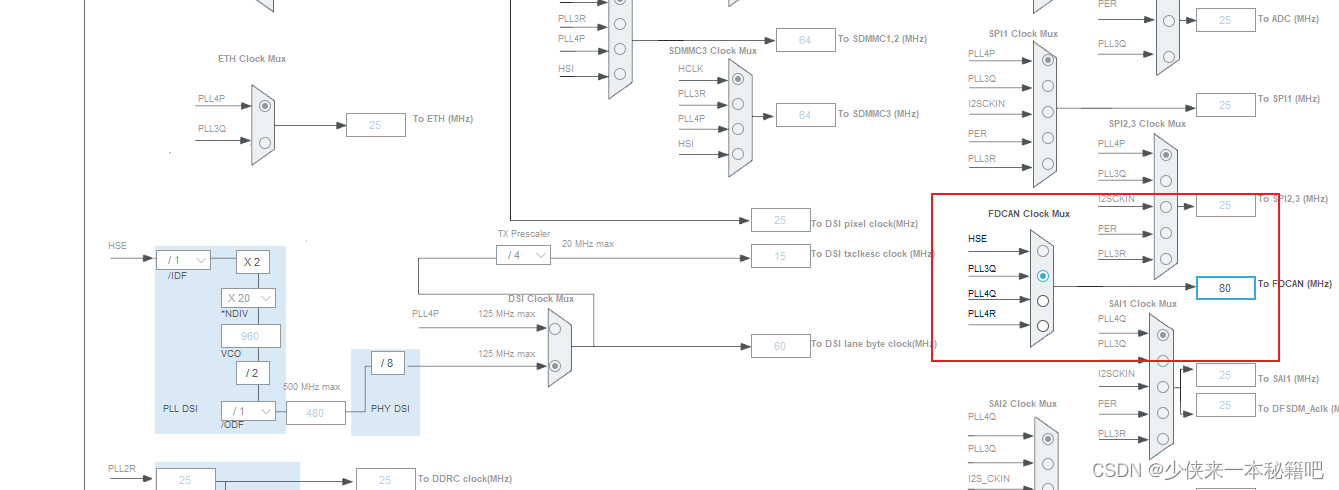
时钟设置

1.2启用FDCAN
首先可以设置过滤器,随后启动FDCAN
- /*##-1 Configure the FDCAN filters ########################################*/
- /* Configure standard ID reception filter to Rx FIFO 0 */
- sFilterConfig.IdType = FDCAN_STANDARD_ID;
- sFilterConfig.FilterIndex = 0;
- sFilterConfig.FilterType = FDCAN_FILTER_MASK;
- sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO0;
- sFilterConfig.FilterID1 = 0x444;
- sFilterConfig.FilterID2 = 0x555;
- if (HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig) != HAL_OK)
- {
- Error_Handler();
- }
- /* Configure extended ID reception filter to Rx FIFO 1 */
- sFilterConfig.IdType = FDCAN_EXTENDED_ID;
- sFilterConfig.FilterIndex = 0;
- sFilterConfig.FilterType = FDCAN_FILTER_MASK;
- sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO1;
- sFilterConfig.FilterID1 = 0x1111111;
- sFilterConfig.FilterID2 = 0x2222222;
- if (HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig) != HAL_OK)
- {
- Error_Handler();
- }
- /*##-2 Start FDCAN controller (continuous listening CAN bus) ##############*/
- if (HAL_FDCAN_Start(&hfdcan1) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE END 2 */
发送数据
- /*##-3 Transmit messages ##################################################*/
- /* Add message to Tx FIFO */
- TxHeader.Identifier = 0x444;
- TxHeader.IdType = FDCAN_STANDARD_ID;
- TxHeader.TxFrameType = FDCAN_DATA_FRAME;
- TxHeader.DataLength = FDCAN_DLC_BYTES_8;
- TxHeader.ErrorStateIndicator = FDCAN_ESI_ACTIVE;
- TxHeader.BitRateSwitch = FDCAN_BRS_ON;
- TxHeader.FDFormat = FDCAN_FD_CAN;
- TxHeader.TxEventFifoControl = FDCAN_STORE_TX_EVENTS;
- TxHeader.MessageMarker = 0x52;
- if (HAL_FDCAN_AddMessageToTxFifoQ(&hfdcan1, &TxHeader, TxData0) != HAL_OK)
- {
- Error_Handler();
- }
等待发送完成
- /* Check transmission occurred before timeout */
- while(HAL_FDCAN_IsTxBufferMessagePending(&hfdcan1, FDCAN_TX_BUFFER0 | FDCAN_TX_BUFFER1 | FDCAN_TX_BUFFER2) != 0)
- {
- if((HAL_GetTick() - Tickstart) > TX_FAST_TIMEOUT)
- {
- Error_Handler();
- break;
- }
- }
查询接收到的can数据
- while(HAL_FDCAN_GetRxFifoFillLevel(&hfdcan1, FDCAN_RX_FIFO0) != 1)
- {
- if((HAL_GetTick() - Tickstart) > RX_FAST_TIMEOUT)
- {
- Error_Handler();
- break;
- }
- }
获取数据
- if (HAL_FDCAN_GetRxMessage(&hfdcan1, FDCAN_RX_FIFO0, &RxHeader, RxData) != HAL_OK)
- {
- Error_Handler();
- }
————————————————
版权声明:少侠来一本秘籍吧
|
.png) STMCU小助手
发布时间:2022-10-2 23:45
STMCU小助手
发布时间:2022-10-2 23:45
 微信公众号
微信公众号
 手机版
手机版