.png) STMCU小助手
发布时间:2022-10-24 19:02
STMCU小助手
发布时间:2022-10-24 19:02
|
这一章来说一说SPI通信,同样的很多模块也用到了SPI通信,比如0.96寸的OLED模块。玩过单片机的小伙伴都知道OLED有4针的也有7针的,4针的就是IIC通信,7针的就是SPI通信。 SPI 是英语 Serial Peripheral interface 的缩写,顾名思义就是串行外围设备接口。是 Motorola首先在其 MC68HCXX 系列处理器上定义的。SPI 接口主要应用在 EEPROM,FLASH,实时时钟,AD 转换器,还有数字信号处理器和数字信号解码器之间。SPI是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为 PCB 的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,STM32 也有 SPI 接口。SPI通讯使用 3 条总线及片选线,3条总线分别为 SCK、MOSI、MISO、SS。 
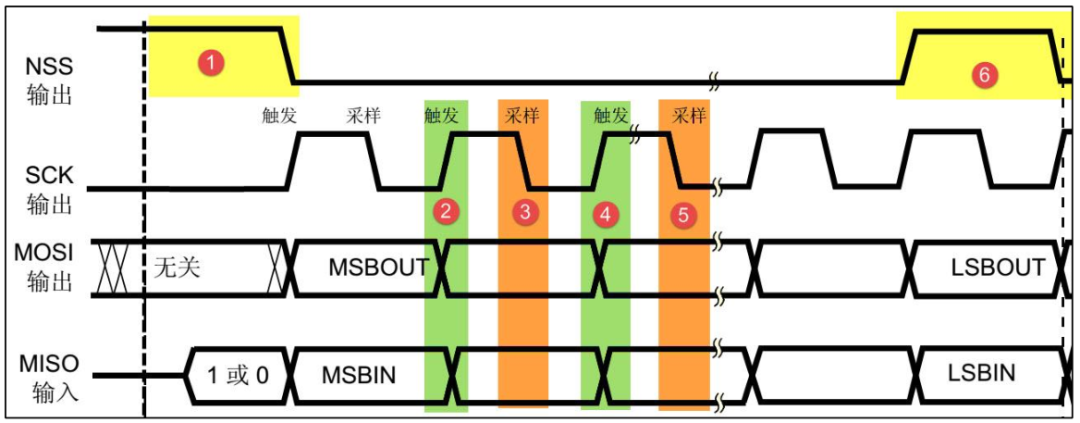
(1) SCK (Serial Clock):时钟信号线,用于通讯数据同步。它由通讯主机STM32产生,决定了通讯的速率,不同的设备支持的最高时钟频率不一样,如STM32的SPI 时钟频率最大为fpclk /2,两个设备之间通讯时,通讯速率受限于低速设备。 (2) MOSI (Master Output, Slave Input):主设备STM32输出/从设备输入引脚。STM32的数据从这条信号线输出,从机由这条信号线读入STM32发送的数据,即这条线上数据的方向为STM32到从机。 (3) MISO(Master Input,,Slave Output):主设备STM32输入/从设备输出引脚。STM32从这条信号线读入数据,从机的数据由这条信号线输出到STM32,即在这条线上数据的方向为从机到STM32。 (4) SS( Slave Select):片选信号线,也称为 NSS、CS。当有多个SPI 从设备与 SPI 主机STM32相连时,设备的其它信号线 SCK、MOSI及 MISO同时并联到相同的 SPI总线上,即无论有多少个从设备,都共同只使用这 3 条总线;而每个从设备都有独立的这一条 NSS 信号线,本信号线独占主机的一个引脚,即有多少个从设备,就有多少条片选信号线。I2C 协议中通过设备地址来寻址、选中总线上的某个设备并与其进行通讯;而 SPI 协议中没有设备地址,它使用 NSS 信号线来寻址,当主机要选择从设备时,把该从设备的 NSS 信号线设置为低电平,该从设备即被选中,即片选有效,接着主机开始与被选中的从设备进行 SPI 通讯。所以SPI通讯以 NSS 线置低电平为开始信号,以 NSS 线被拉高作为结束信号。 二、 具体代码编写 1.SPI引脚初始化 我们使用 STM32 的 SPI1 的主模式,第一步就要是能 SPI1 的时钟,SPI1 的时钟通过 APB2ENR 的第12位来设置。其次要设置 SPI1 的相关引脚为复用输出,这样才会连接到 SPI1 上否则这些 IO 口还是默认的状态,也就是标准输入输出口。这里我们使用的是 PA5、PA6、PA7 这 3 个,所以设置这三个为复用 IO。
2.设置SPI1工作模式 接下来我们要初始化 SPI1,这在库函数中是通过 SPI_Init 函数来实现的,和STM32的其他外设一样同样需要配置这些参数,使用中我们不需要关心这些具体的设置。设置 SPI1 为主机模式,设置数据格式为 8 位,然设置 SCK 时钟极性及采样方式。并设置 SPI1 的时钟频率(最大 18Mhz),以及数据的格式(MSB 在前还是LSB 在前)。这在库函数中是通过 SPI_Init 函数来实现的。 SPI_InitTypeDef SPI_InitStructure;SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;//设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
3.使能SPI1 初始化完成之后接下来是要使能 SPI1 通信了,在使能 SPI1 之后,我们就可以开始 SPI 通讯了。
4.使用SPI读写一个字节
本函数中不包含 SPI 起始和停止信号,只是收发的主要过程,所以在调用本函数前后要做好起始和停止信号的操作; 循环调用库函数SPI_I2S_GetFlagStatus 检测事件,若检测到事件,则进入通讯的下一阶段,若未检测到事件则停留在此处一直检测,当检测200次都还没等待到事件则认为通讯失败,退出通讯; 通过检测TXE标志,获取发送缓冲区的状态,若发送缓冲区为空,则表示可能存在的上一个数据已经发送完毕;等待至发送缓冲区为空后,调用库函数 SPI_I2S_SendData 把要发送的数据“TxData”写入到 SPI的数据寄存器 DR,写入 SPI数据寄存器的数据会存储到发送缓冲区,由 SPI外设发送出去; 写入完毕后通过循环200次等待RXNE 事件,即接收缓冲区非空事件。由于 SPI 双线全双工模式下MOSI 与 MISO 数据传输是同步的,当接收缓冲区非空时,表示上面的数据发送完毕,且接收缓冲区也收到新的数据; 等待至接收缓冲区非空时,通过调用库函数 SPI_I2S_ReceiveData 读取 SPI 的数据寄存器 DR,就可以获取接收缓冲区中的新数据了。代码中使用关键字“return”把接收到的这个数据作为SPI_SendByte 函数的返回值。 以上的步骤我们就搞定了SPI 的基本收发单元,还需要了解如何对FLASH 芯片进行读写。FLASH 芯片自定义了很多指令,我们通过控制 STM32 利用 SPI 总线向 FLASH 芯片发送指令,FLASH芯片收到后就会执行相应的操作。而这些指令,对主机端(STM32)来说,只是它遵守最基本的 SPI 通讯协议发送出的数据,但在设备端(FLASH 芯片)把这些数据解释成不同的意义,所以才成为指令。查看FLASH 芯片的数据手册可了解各种它定义的各种指令的功能及指令格式。这里我就不过多的将写了。 转载自: 果果小师弟 |
STM32F4中文用户手册
STM32F400、STM32F402 Cortex-M4超值单片机
SPI 高温读错最后一位?STM32F42xx 官方根治方案
STM32CubeIDE for Visual Studio Code 开发流水帐
STM32的RTC电流消耗异常问题分析
STM32与51单片机差异一文速览
STM32大神笔记,超详细单片机学习汇总资料
STM32F429I-Disco官方提供的裸机BSP
【STM32入门学习路径指南】(四步走)
STM32和Arduino对比,谁更耐打?
 微信公众号
微信公众号
 手机版
手机版