.png) STMCU小助手
发布时间:2022-12-9 17:00
STMCU小助手
发布时间:2022-12-9 17:00
|
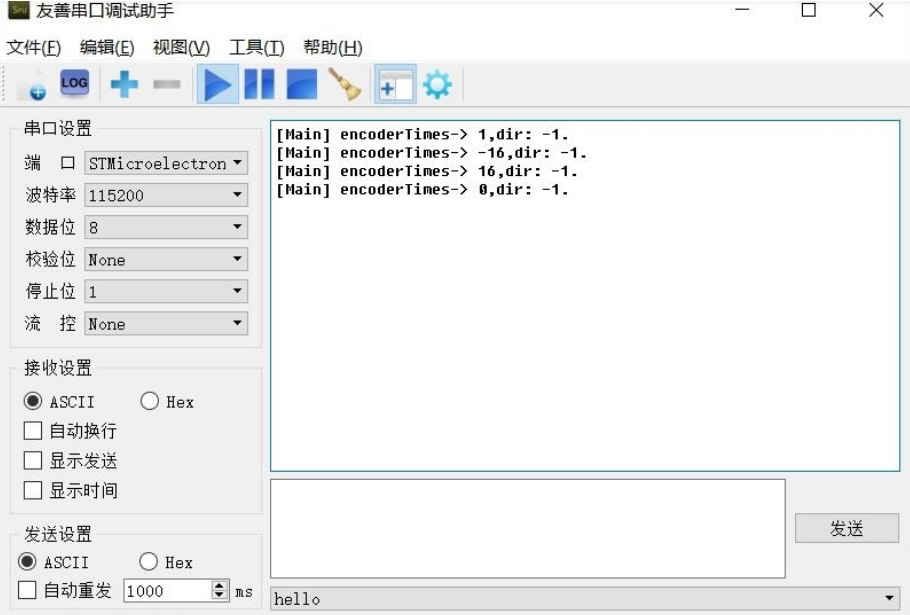
想装一个码盘用来测速,但是直接把码盘装在输出轴又很难做到足够的分辨率,于是就想到了一个比较冷门的方法,自制了一个码盘,并且以此为基础,给一个TT电机加装一组正交编码器。 开始吧! 1、先说一说正交编码器 从名字来说,正交编码器就是编码器的一种,百科上定义是“正交编码器一般指增量式编码器。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小……balabala……”其实就是把圆周的旋转运动转换成2路相位差90度的电平跳变信号,如下图: 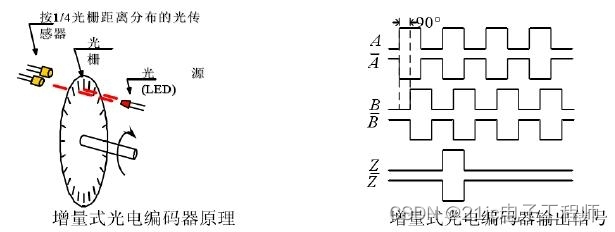 上图中有Z相,相当于是零点,可以消除累计误差,部分应用中可以不使用。 这种编码器的优点就是可以根据AB相位关系推测出转动方向,而且当圆周栅格数目为n时,跳变信号可以达到4n个,变相提高了分辨率。 那说了这么多,接下来我们就用最常见最便宜的TT减速电机为基础,使用2对射式光电开关(ITR9608),制作一个带正交编码器的电机。 2、准备材料,设计ITR9608原理图并焊接 首先是TT电机,可以说是最普遍最便宜的一款了,这还是我十年前入门玩智能小车时候买的存货  上图中箭头所指的位置是本方案的关键,就是要利用这一小点凸起搞点事情,首先用助焊剂轻轻擦拭一下这段短短的轴,然后准备一个小铜片(没有铜片铝片也行,再没有,切一点万用板也可以),大小控制在10mm边长,中间钻一个2mm多一点的孔(尽量居中钻孔),就像下面这样  接下来使用助焊剂轻轻擦拭铜片,然后将铜片通过小孔安装在电机轴上,如下图  接下来的是关键一步,焊接铜片,使用60W电烙铁,快速焊接铜片的小孔,使其牢固地连接在电机轴上,对,这里其实是用来粘接码盘的一个基点,哈哈,所以我说这个凸出的一点点轴是关键。 ITR9608是一种常见的对射式光电开关,加两个电阻就可以使用了,设计了简单的原理图  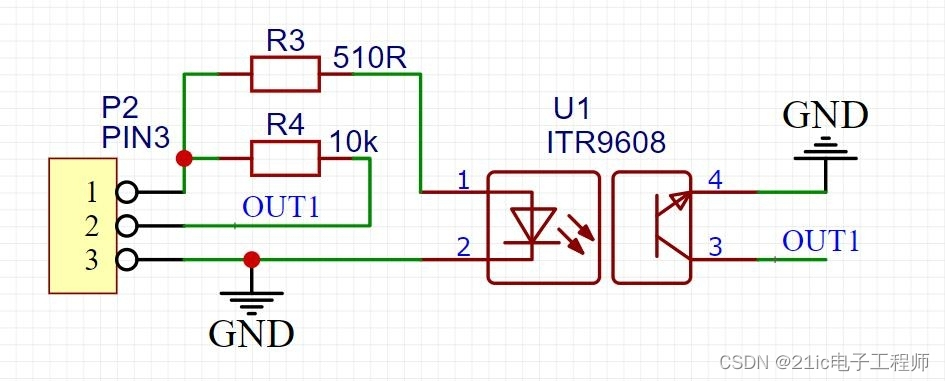 按图焊接,需要焊接两个。 3、设计码盘组件安装座,并进行切割加工   这里有个地方要提示一下啊:上图中,两个光电开关的安装角度一定要注意,一个开关对准栅格的时候,另一个开关的位置要刚好被遮挡,这样就能保证信号“正交”,上图中使用的是24线码盘,两个传感器夹角67.5度。  4、安装码盘组件  由于上面24线码盘测试中发现会“丢失”信号,分析可能是由于栅格过于密集,后来切割了一个4线的,使用的是普通包装纸(更轻,避免对电机带负载能力产生影响)   5、基于stm32f103c8t6创建工程,编写驱动程序 这里主要的就是通过cubeMX对定时器模式进行配置,简单的两步就可以了,使用TIM2,在combined Channels选择“Encoder Mode”,如下图:  接下来配置一下编码模式,选择“……TI1 and TI2”,这样就会上升下降沿都计数,实际脉冲数数值上是栅格的4倍  其他的再配置一下串口,我准备用串口打印日志,查看脉冲数。 根据配置的引脚,连接编码器和控制板(分别接PA0和PA1),  6、测试效果 手动拨动码盘一周,可以看到串口读出16个脉冲,反转的时候读出的数值是-16,这里没有写其他复杂的算法,只是周期性读取,然后清零,所以不动的时候读出来的是0 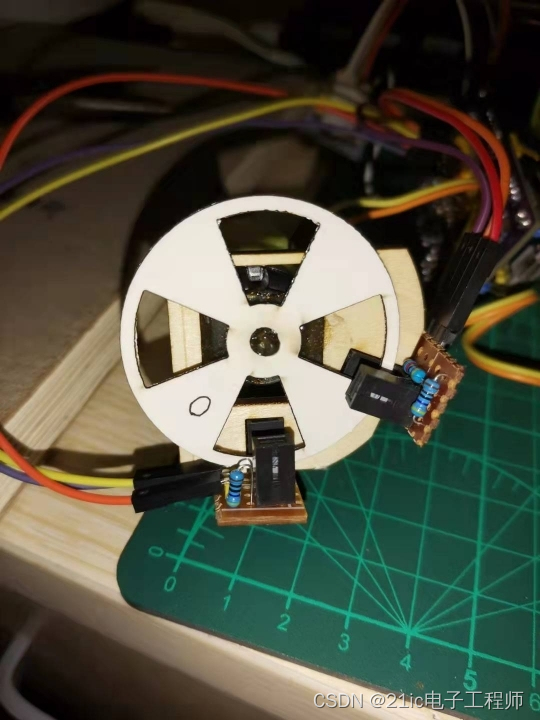  7、总结 从硬件上来说,有点点复杂,需要特别注意码盘线数不要太多,从软件上来说,cubeMX配置还是非常简单的,也就是读取很容易,实际使用时候需要根据需求对数据进行后处理,以解析出里程、方向等更多信息。 END! 感谢阅读,感谢关注! --------------------- 作者:逍遥李 |
【福利三:雨露均沾·逢7狂欢】之三:AI帮我查BUG
福利三:雨露均沾·逢7狂欢】之二:STM32F407VG串口通信乱码故障的排除
基于STM32F103的I2C主从机通信
OpenBLT移植到STM32F103战舰开发板上适用于所有STM32F103系列的Bootloader
TFT LCD 与 FSMC 的硬件连接大容量 STM32F10xxx FSMC 接口
单片机:初学者该了解的STM32F103基础知识
2025软件工具兔哥知道
STM32之继电器模块
STM32固件库分享,超全系列整理
【MCU实战经验】基于STM32F103的二轮平衡车(6轴上位机 源代...
 微信公众号
微信公众号
 手机版
手机版