.png) STMCU小助手
发布时间:2022-12-10 19:00
STMCU小助手
发布时间:2022-12-10 19:00
|
家介绍经典C语言平方根倒数速算法(或称Fast Inverse Square Root)。详细推导魔法数字0x5f3759df究竟从何而来,并最终在MCU上对比该算法和<math.h>中double sqrt(double)方法的性能表现并给出使用建议。本文不涉及高深的数学变换或复杂的计算机原理,但希望读者具备一些C语言基础;此外任何相关领域的积累都可能有助于内容理解。 希望本文能帮助到有需要的朋友。 平方根倒数简介 求平方根倒数在向量单位化操作中很常见,先举个例子,假设在二维平面内有一向量:
将该向量单位化,即将向量模长缩放为1,用向量除以它的模,可以表达成下式:
此处,单位向量的坐标,即是原向量坐标和模长倒数的乘积。 一般而言,对任一数x,
C语言内求平方根倒数 C语言内求平方根属于常规操作,因为<math.h>中已经提供了double sqrt(double)函数给大家调用,该函数接收一个double型变量,并返回其平方根。部分场合使用float类型,如果是我,我会这么写:
事实上,大多数计算机处理加法和乘法时更快,对于除法和开方运算,速度相对较慢。定义在<math.h>中的sqrt()方法其系统开销是比较大的,尤其在部分MCU上,有时不能很好地满足系统实时性要求。
该情景与上世纪末PC算力较低的情况颇有几分相似,而在那段PC内存按MB计算的岁月里,优秀的C语言程序员们找到了该问题的解决方法:平方根倒数速算法(Fast Inverse Square Root),据说该算法最早由GaryTarolli在SGI Indigo开发中使用,对起源感兴趣的朋友可自行探究。 平方根倒数速算法是一个单独的函数实现,代码如下:
该函数接收一个float型变量,并返回其平方根倒数。
Step1.奇怪的地址类型转换
代码第四行将浮点数x按照整型数据操作,这里的操作方法与类型转换有很大不同;类型转换将内存中按照浮点数标准表示的值近似为最接近的整数,并按照整数标准储存在内存中,像这样:i=(long)x;要理解*(long *) &x与(long)x的不同,需要了解浮点数在计算机中的表示方法。
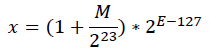
最高位,第31位,为符号位,若S=0,该浮点数为正数;若S=1,该浮点数为负数。
则x表示的浮点数值为:
注意平方根倒数速算法只接收正数,所以全文只讨论x为正浮点数的情况。 此时再回来看i=*(long *) &x这行代码; 第一步;取x的地址,注意此时x的地址指向一个浮点数,内存中对应的数据为:E*2^23+M 第二步;将该地址转换为指向long整型的地址,注意转换的是地址类型而不是数据,现在内存中的数据仍然是:E*2^23+M 第三步,取该地址指向的数据,赋给i;此时程序将按照整型标准去读取这个数据。因此,可以将i理解为x对应内存数据的整型解释。现在可以对i进行整型支持的操作,比如接下来要用到的位移操作。 准备工作已经完成,现在进入算法的核心,即施放魔法:
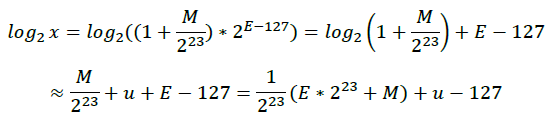
要理解这行代码,需要一点点数学铺垫;我们先给x表示的浮点数取个对数:
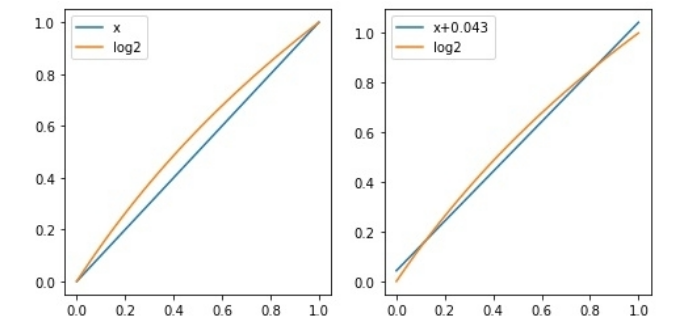
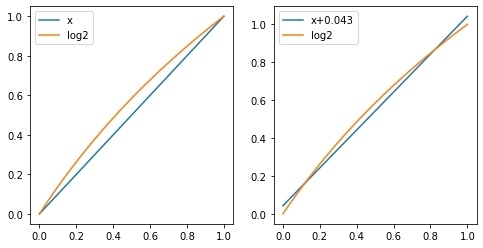
其中,M表示尾数,M/2^23范围在[0,1)之间;在极限理论中,若x属于[0,1],有以下关系:
即在x接近0或1的条件下,log2(1+x)接近x;很明显当x不靠近0或1时,误差会变大,如下图左侧所示:
如果在等式右侧加入一个微小量u,可以使得x+u在[0,1]范围内近似log2(1+x),如上图右侧所示:
所以有:
因此,
此时再倒回去看浮点数x在内存中的存放形式,即:E*2^23+M; 因此可以认为浮点数的对数形式与其内存存放形式相似,只是添加了缩放和平移。我们知道:
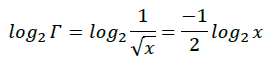
令:
所以有:
将上式展开:
稍作整理:
这太棒了,因为浮点数在内存中的存放形式,即:E*2^23+M 而上式中
则相当于对其内存形式右移1位,即
由此可知,魔法数字0x5f3759df就是包含u在内的修正项:
至此我们已经完成了魔法代码的解析:
这太棒了,因为浮点数在内存中的存放形式,即:E*2^23+M 而上式中
则相当于对其内存形式右移1位,即
由此可知,魔法数字0x5f3759df就是包含u在内的修正项:
至此我们已经完成了魔法代码的解析:
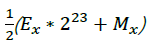
i就是x对应内存数据的整型解释,将i右移1位相当于乘以二分之一,也就是1/2*(Ex*2^23+Mx); 等式右侧的运算结果,就是
,也就是
即
注意此时程序认为i是整型变量,所以需要下一行代码再将其转换为浮点型; y = *(float *) &i; // 获得平方根倒数估计值此时y即是x的平方根倒数。
由于上述推导中,引入了修正系数u,所以y只是近似解。 接下来使用牛顿法(Newton Method)进行一次迭代,使y更接近准确值。简单来说,使用牛顿法,可以从一个近似解获得一个更接近准确答案的解;牛顿法的核心思想是迭代,对于我们正在讨论的问题,属于已知x求y的类型,即
假设已经获取一个近似解y1,则可以通过一次迭代求取更优解y2:
神奇的是计算y2仅需要乘法和减法运算,于是有如下代码: y = y * (1.5 - halfx * y * y); // 一次牛顿迭代 该行代码返回优化后的平方根倒数,也就是最终运算结果。 性能测试 接下来我会在STM32G071上测试Fast Inverse Square Root算法与<math.h>中提供的double sqrt(double)算法的性能,并尝试以此证明它为何被尊为经典。STM32G071运行在64MHz下,编译器和调试器优化分别为-O0和-g3。 使用uint32_t替代long型:
因为STM32G071的RAM大小为36KB,先构造了8000个float数据的数组,大小为32KB;构造方法如下:
使用两种不同算法处理上述8000个数据,测试代码如下(注意此处仅作演示,测试方法不一定严谨):
在上述测试环境下,FInvSqrtRoot耗时181ms,1 / sqrt()耗时325ms,FInvSqrtRoot比1 / sqrt()快大约79%。由于sroot是float型,sqrt()返回double型,所以1 / sqrt()测试时有额外的类型转换损耗;将sroot更改为double型,则类型转换损耗由FInvSqrtRoot承担;该状态下,FInvSqrtRoot耗时187ms,1 / sqrt()耗时315ms,FInvSqrtRoot比1 / sqrt()快大约68%。注意FInvSqrtRoot求取的仅是平方根倒数的近似值,和1 / sqrt()比对,误差约在1%以内。 魔改:平方根速算法 根据上述原理,可将平方根倒数速算法修改为平方根速算法,代码如下:
在上述测试环境下,FSqrtRoot耗时109ms,sqrt()耗时221ms,FInvSqrtRoot比sqrt()快大约100%。由于sroot是float型,sqrt()返回double型,所以sqrt()测试时有额外的类型转换损耗;将sroot更改为double型,则类型转换损耗由FSqrtRoot承担;该状态下,FSqrtRoot耗时115ms,sqrt()耗时208ms,FInvSqrtRoot比sqrt()快大约80%。 感兴趣的朋友可自行推导实验,算法性能也请根据实际需求比对。 --------------------- 作者:Litthins |
【福利三:逢7发帖赢大礼】4、基于STM32G070板子SPI flash 移植SFUD库
【福利三:逢7发帖赢大礼】基于STM32G070板子的uart shell移植设计
【福利三:逢7发帖赢大礼】3、基于STM32G070板子的YModem串口协议通信
【福利三:逢7发帖赢大礼】2、基于STM32G070板子的OLED移植U8G2库
实战经验 | ClassB功能安全认证代码与应用代码分区的实现要点
STM32G0 系列 I2C 通信异常典型案例分析与解决方案总结
经验分享 | LAT1490 两个STM32G0 I2C 通信异常的案例分析
经验分享 | STM32G0 I2C bootloader Go 命令后调试连接失败:DBG_SWEN 位复位修复
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
 微信公众号
微信公众号
 手机版
手机版