前言
G4板载了一块M24C02(eeprom)和一块MCP4017(可编程电阻),省赛中多考M24C02,本篇文章讲述如何用软件I2驱动M24C02。
I2C
1.原理图以及配置元素

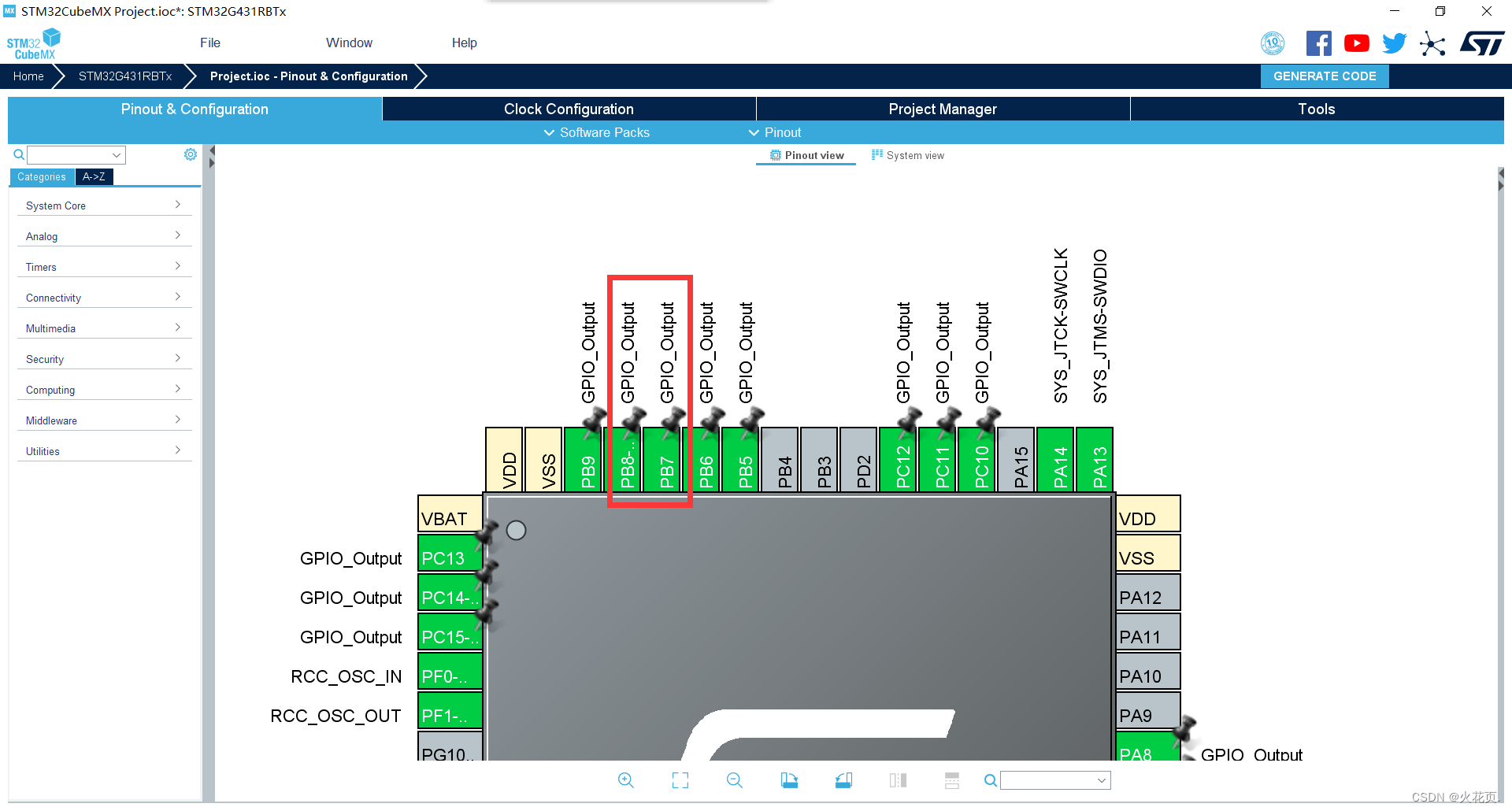
分析:由图可知,PB6为I2C的SCL线,PB7为I2C的SDA线
2.CubeMx的配置步骤

大赛是提供了I2C的驱动的这里我们只需要把两个引脚设置输出模式就行了,不再需要其他步骤。
3.生成工程


将红框中的两个文件复制黏贴到工程文件夹中的bsp文件夹中并改名为i2c.c和i2c.h。

在bsp文件中新建i2cc.c和i2c.h文件
打开工程将两个文件添加到工程中去

至此工程就建立完毕了
4.测试代码
i2c.h:- #ifndef __I2C_H
- #define __I2C_H
- #include "main.h"
- void I2CStart(void);
- void I2CStop(void);
- unsigned char I2CWaitAck(void);
- void I2CSendAck(void);
- void I2CSendNotAck(void);
- void I2CSendByte(unsigned char cSendByte);
- unsigned char I2CReceiveByte(void);
- void I2CInit(void);
- /*******下方为自己添加的函数声明**************/
- unsigned char eeprom_read(unsigned char addr);
- void eeprom_write(unsigned char addr, unsigned char dat);
- #endif
i2c.c:
main.c:
- /* USER CODE BEGIN Header */
- /**
- ******************************************************************************
- * @file : main.c
- * @brief : Main program body
- ******************************************************************************
- * @attention
- *
- * <h2><center>© Copyright (c) 2023 STMicroelectronics.
- * All rights reserved.</center></h2>
- *
- * This software component is licensed by ST under BSD 3-Clause license,
- * the "License"; You may not use this file except in compliance with the
- * License. You may obtain a copy of the License at:
- * opensource.org/licenses/BSD-3-Clause
- *
- ******************************************************************************
- */
- /* USER CODE END Header */
- /* Includes ------------------------------------------------------------------*/
- #include "main.h"
- #include "adc.h"
- #include "tim.h"
- #include "gpio.h"
- /* Private includes ----------------------------------------------------------*/
- /* USER CODE BEGIN Includes */
- #include "lcd.h"
- #include "badc.h"
- #include "stdio.h"
- #include "i2c.h"
- #include "interrupt.h"
- /* USER CODE END Includes */
- /* Private typedef -----------------------------------------------------------*/
- /* USER CODE BEGIN PTD */
- /* USER CODE END PTD */
- /* Private define ------------------------------------------------------------*/
- /* USER CODE BEGIN PD */
- /* USER CODE END PD */
- /* Private macro -------------------------------------------------------------*/
- /* USER CODE BEGIN PM */
- /* USER CODE END PM */
- /* Private variables ---------------------------------------------------------*/
- /* USER CODE BEGIN PV */
- extern struct keys key[4];
- unsigned char adc1_L, adc1_H;
- /* USER CODE END PV */
- /* Private function prototypes -----------------------------------------------*/
- void SystemClock_Config(void);
- /* USER CODE BEGIN PFP */
- /* USER CODE END PFP */
- /* Private user code ---------------------------------------------------------*/
- /* USER CODE BEGIN 0 */
- /* USER CODE END 0 */
- /**
- * @brief The application entry point.
- * @retval int
- */
- int main(void)
- {
- /* USER CODE BEGIN 1 */
- /* USER CODE END 1 */
- /* MCU Configuration--------------------------------------------------------*/
- /* Reset of all peripherals, Initializes the Flash interface and the Systick. */
- HAL_Init();
- /* USER CODE BEGIN Init */
- /* USER CODE END Init */
- /* Configure the system clock */
- SystemClock_Config();
- /* USER CODE BEGIN SysInit */
- /* USER CODE END SysInit */
- /* Initialize all configured peripherals */
- MX_GPIO_Init();
- MX_TIM3_Init();
- MX_TIM16_Init();
- MX_TIM17_Init();
- MX_ADC1_Init();
- MX_ADC2_Init();
- /* USER CODE BEGIN 2 */
- LCD_Init();
- LCD_Clear(Black);
- LCD_SetBackColor(Black);
- LCD_SetTextColor(White);
- HAL_TIM_Base_Start_IT(&htim3);
- /* USER CODE END 2 */
- /* Infinite loop */
- /* USER CODE BEGIN WHILE */
- while (1)
- {
- /* USER CODE END WHILE */
- /* USER CODE BEGIN 3 */
- char text[30];
- unsigned int adc1, adc2;
- adc1 = getADC(&hadc1);
- sprintf(text, " V1:%.2f", adc1 * 3.3 / 4096);
- LCD_DisplayStringLine(Line4, (unsigned char *)text);
- adc2 = getADC(&hadc2);
- sprintf(text, " V2:%.2f", adc2 * 3.3 / 4096);
- LCD_DisplayStringLine(Line5, (unsigned char *)text);
- if(key[0].single_flag) //短按写入
- {
- adc1_L = adc1 & 0xff;
- adc1_H = adc1 >> 8;
- eeprom_write(1, adc1_L);
- HAL_Delay(10);
- eeprom_write(2, adc1_H);
- key[0].single_flag = 0;
- }
- if(key[0].long_flag) //长按读出
- {
- char text[30];
- unsigned int eep_temp = (eeprom_read(2) << 8) + eeprom_read(1);
- sprintf(text, " ADC_eep=%.2f", eep_temp * 3.3 / 4096);
- LCD_DisplayStringLine(Line8, (unsigned char *)text);
- key[0].long_flag = 0;
- }
- }
- /* USER CODE END 3 */
- }
- /**
- * @brief System Clock Configuration
- * @retval None
- */
- void SystemClock_Config(void)
- {
- RCC_OscInitTypeDef RCC_OscInitStruct = {0};
- RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
- RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
- /** Configure the main internal regulator output voltage
- */
- HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
- /** Initializes the RCC Oscillators according to the specified parameters
- * in the RCC_OscInitTypeDef structure.
- */
- RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
- RCC_OscInitStruct.HSEState = RCC_HSE_ON;
- RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
- RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
- RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV3;
- RCC_OscInitStruct.PLL.PLLN = 20;
- RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
- RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
- RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
- if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
- {
- Error_Handler();
- }
- /** Initializes the CPU, AHB and APB buses clocks
- */
- RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
- |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
- RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
- RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
- RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
- RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
- if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
- {
- Error_Handler();
- }
- /** Initializes the peripherals clocks
- */
- PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC12;
- PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;
- if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
- {
- Error_Handler();
- }
- }
- /* USER CODE BEGIN 4 */
- /* USER CODE END 4 */
- /**
- * @brief This function is executed in case of error occurrence.
- * @retval None
- */
- void Error_Handler(void)
- {
- /* USER CODE BEGIN Error_Handler_Debug */
- /* User can add his own implementation to report the HAL error return state */
- __disable_irq();
- while (1)
- {
- }
- /* USER CODE END Error_Handler_Debug */
- }
- #ifdef USE_FULL_ASSERT
- /**
- * @brief Reports the name of the source file and the source line number
- * where the assert_param error has occurred.
- * @param file: pointer to the source file name
- * @param line: assert_param error line source number
- * @retval None
- */
- void assert_failed(uint8_t *file, uint32_t line)
- {
- /* USER CODE BEGIN 6 */
- /* User can add his own implementation to report the file name and line number,
- ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
- /* USER CODE END 6 */
- }
- #endif /* USE_FULL_ASSERT */
- /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
————————————————
版权声明:火花页.
|
.png) STMCU小助手
发布时间:2023-3-1 22:25
STMCU小助手
发布时间:2023-3-1 22:25
 微信公众号
微信公众号
 手机版
手机版