创建基于F411的芯片空工程。
启用hwtimer:

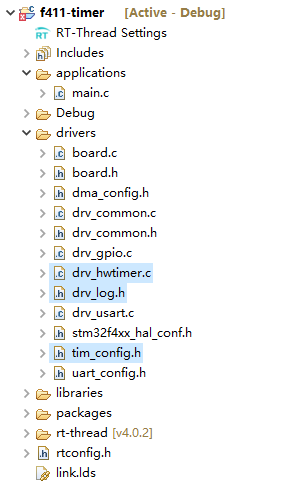
拷贝以下三个文件到drivers目录,路径分别为
C:\RT-ThreadStudio\download\rt-thread-sdk\rt-thread-src\v4.0.2\bsp\stm32\libraries\HAL_Drivers\config\f4
和 C:\RT-ThreadStudio\download\rt-thread-sdk\rt-thread-src\v4.0.2\bsp\stm32\libraries\HAL_Drivers 。

注释掉drv_hwtimer.c中的#include "drv_config.h"。
取消注释stm32f4xx_hal_conf.h中的#define HAL_TIM_MODULE_ENABLED。
向tim_config.h添加#include <board.h>。
向drv_hwtimer.c添加#include <rtdevice.h>。
向drv_hwtimer.c添加#include <tim_config.h>。
在board.h中定义需要使用的定时器:

根据要使用的定时器,修改tim_config.h:- /*
- * Copyright (c) 2006-2018, RT-Thread Development Team
- *
- * SPDX-License-Identifier: Apache-2.0
- *
- * Change Logs:
- * Date Author Notes
- * 2018-12-11 zylx first version
- */
- #ifndef __TIM_CONFIG_H__
- #define __TIM_CONFIG_H__
- #include <rtthread.h>
- #include <board.h>
- #ifdef __cplusplus
- extern "C" {
- #endif
- #ifndef TIM_DEV_INFO_CONFIG
- #define TIM_DEV_INFO_CONFIG \
- { \
- .maxfreq = 1000000, \
- .minfreq = 3000, \
- .maxcnt = 0xFFFF, \
- .cntmode = HWTIMER_CNTMODE_UP, \
- }
- #endif /* TIM_DEV_INFO_CONFIG */
- #ifdef BSP_USING_TIM1
- #ifndef TIM1_CONFIG
- #define TIM1_CONFIG \
- { \
- .tim_handle.Instance = TIM1, \
- .tim_irqn = TIM1_UP_TIM10_IRQn, \
- .name = "timer1", \
- }
- #endif /* TIM11_CONFIG */
- #endif /* BSP_USING_TIM11 */
- #ifdef BSP_USING_TIM2
- #ifndef TIM2_CONFIG
- #define TIM2_CONFIG \
- { \
- .tim_handle.Instance = TIM2, \
- .tim_irqn = TIM2_IRQn, \
- .name = "timer2", \
- }
- #endif /* TIM11_CONFIG */
- #endif /* BSP_USING_TIM11 */
- #ifdef BSP_USING_TIM3
- #ifndef TIM3_CONFIG
- #define TIM3_CONFIG \
- { \
- .tim_handle.Instance = TIM3, \
- .tim_irqn = TIM3_IRQn, \
- .name = "timer3", \
- }
- #endif /* TIM11_CONFIG */
- #endif /* BSP_USING_TIM11 */
- #ifdef BSP_USING_TIM4
- #ifndef TIM4_CONFIG
- #define TIM4_CONFIG \
- { \
- .tim_handle.Instance = TIM4, \
- .tim_irqn = TIM4_IRQn, \
- .name = "timer4", \
- }
- #endif /* TIM11_CONFIG */
- #endif /* BSP_USING_TIM11 */
- #ifdef BSP_USING_TIM5
- #ifndef TIM5_CONFIG
- #define TIM5_CONFIG \
- { \
- .tim_handle.Instance = TIM5, \
- .tim_irqn = TIM5_IRQn, \
- .name = "timer5", \
- }
- #endif /* TIM11_CONFIG */
- #endif /* BSP_USING_TIM11 */
- #ifdef BSP_USING_TIM9
- #ifndef TIM9_CONFIG
- #define TIM9_CONFIG \
- { \
- .tim_handle.Instance = TIM9, \
- .tim_irqn = TIM1_BRK_TIM9_IRQn, \
- .name = "timer9", \
- }
- #endif /* TIM11_CONFIG */
- #endif /* BSP_USING_TIM11 */
- #ifdef BSP_USING_TIM10
- #ifndef TIM10_CONFIG
- #define TIM10_CONFIG \
- { \
- .tim_handle.Instance = TIM10, \
- .tim_irqn = TIM1_UP_TIM10_IRQn, \
- .name = "timer10", \
- }
- #endif /* TIM11_CONFIG */
- #endif /* BSP_USING_TIM11 */
- #ifdef BSP_USING_TIM11
- #ifndef TIM11_CONFIG
- #define TIM11_CONFIG \
- { \
- .tim_handle.Instance = TIM11, \
- .tim_irqn = TIM1_TRG_COM_TIM11_IRQn, \
- .name = "timer11", \
- }
- #endif /* TIM11_CONFIG */
- #endif /* BSP_USING_TIM11 */
- #ifdef __cplusplus
- }
- #endif
- #endif /* __TIM_CONFIG_H__ */
在drv_hwtimer.h中增加CubeMX生成的底层代码:
- void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* htim_base)
- {
- if (htim_base->Instance == TIM1)
- {
- __HAL_RCC_TIM1_CLK_ENABLE();
- }
- else if (htim_base->Instance == TIM2)
- {
- __HAL_RCC_TIM2_CLK_ENABLE();
- }
- else if (htim_base->Instance == TIM3)
- {
- __HAL_RCC_TIM3_CLK_ENABLE();
- }
- else if (htim_base->Instance == TIM4)
- {
- __HAL_RCC_TIM4_CLK_ENABLE();
- }
- else if (htim_base->Instance == TIM5)
- {
- __HAL_RCC_TIM5_CLK_ENABLE();
- }
- else if (htim_base->Instance == TIM9)
- {
- __HAL_RCC_TIM9_CLK_ENABLE();
- }
- else if (htim_base->Instance == TIM10)
- {
- __HAL_RCC_TIM10_CLK_ENABLE();
- }
- else if (htim_base->Instance == TIM11)
- {
- __HAL_RCC_TIM11_CLK_ENABLE();
- }
- }
修改drv_hwtimer.h中HAL_TIM_PeriodElapsedCallback,为使用的定时器添加回调函数:
- void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
- {
- #ifdef BSP_USING_TIM1
- if (htim->Instance == TIM1)
- {
- rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM1_INDEX].time_device);
- }
- #endif
- #ifdef BSP_USING_TIM2
- if (htim->Instance == TIM2)
- {
- rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM2_INDEX].time_device);
- }
- #endif
- #ifdef BSP_USING_TIM3
- if (htim->Instance == TIM3)
- {
- rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM3_INDEX].time_device);
- }
- #endif
- #ifdef BSP_USING_TIM4
- if (htim->Instance == TIM4)
- {
- rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM4_INDEX].time_device);
- }
- #endif
- #ifdef BSP_USING_TIM5
- if (htim->Instance == TIM5)
- {
- rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM5_INDEX].time_device);
- }
- #endif
- #ifdef BSP_USING_TIM9
- if (htim->Instance == TIM9)
- {
- rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM9_INDEX].time_device);
- }
- #endif
- #ifdef BSP_USING_TIM10
- if (htim->Instance == TIM10)
- {
- rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM10_INDEX].time_device);
- }
- #endif
- #ifdef BSP_USING_TIM11
- if (htim->Instance == TIM11)
- {
- rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM11_INDEX].time_device);
- }
- #endif
- }
添加中断函数入口:
- #ifdef BSP_USING_TIM2
- void TIM2_IRQHandler(void)
- {
- /* enter interrupt */
- rt_interrupt_enter();
- HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM2_INDEX].tim_handle);
- /* leave interrupt */
- rt_interrupt_leave();
- }
- #endif
- #ifdef BSP_USING_TIM3
- void TIM3_IRQHandler(void)
- {
- /* enter interrupt */
- rt_interrupt_enter();
- HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM3_INDEX].tim_handle);
- /* leave interrupt */
- rt_interrupt_leave();
- }
- #endif
- #ifdef BSP_USING_TIM4
- void TIM4_IRQHandler(void)
- {
- /* enter interrupt */
- rt_interrupt_enter();
- HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM4_INDEX].tim_handle);
- /* leave interrupt */
- rt_interrupt_leave();
- }
- #endif
- #ifdef BSP_USING_TIM5
- void TIM5_IRQHandler(void)
- {
- /* enter interrupt */
- rt_interrupt_enter();
- HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM5_INDEX].tim_handle);
- /* leave interrupt */
- rt_interrupt_leave();
- }
- #endif
- #ifdef BSP_USING_TIM11
- void TIM1_BRK_TIM9_IRQHandler(void)
- {
- /* enter interrupt */
- rt_interrupt_enter();
- HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM9_INDEX].tim_handle);
- /* leave interrupt */
- rt_interrupt_leave();
- }
- #endif
- #if defined( BSP_USING_TIM1) ||defined(BSP_USING_TIM10)
- void TIM1_UP_TIM10_IRQHandler(void)
- {
- /* enter interrupt */
- rt_interrupt_enter();
- #ifdef BSP_USING_TIM1
- if (__HAL_TIM_GET_FLAG(&stm32_hwtimer_obj[TIM1_INDEX].tim_handle,TIM_IT_UPDATE) != RESET)
- HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM1_INDEX].tim_handle);
- #endif
- #ifdef BSP_USING_TIM10
- if (__HAL_TIM_GET_FLAG(&stm32_hwtimer_obj[TIM10_INDEX].tim_handle,TIM_IT_UPDATE) != RESET)
- HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM10_INDEX].tim_handle);
- #endif
- /* leave interrupt */
- rt_interrupt_leave();
- }
- #endif
- #ifdef BSP_USING_TIM11
- void TIM1_TRG_COM_TIM11_IRQHandler(void)
- {
- /* enter interrupt */
- rt_interrupt_enter();
- HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM11_INDEX].tim_handle);
- /* leave interrupt */
- rt_interrupt_leave();
- }
- #endif
新建一个usertimer.c,添加示例代码,通过msh调用即可看到效果:
- /*
- * Copyright (c) 2006-2020, RT-Thread Development Team
- *
- * SPDX-License-Identifier: Apache-2.0
- *
- * Change Logs:
- * Date Author Notes
- * 2020-03-23 ShineRoyal the first version
- */
- #include <rtthread.h>
- #include <board.h>
- #include <rtdevice.h>
- #define DBG_TAG "user"
- #define DBG_LVL DBG_LOG
- #include <rtdbg.h>
- #define LED0_PIN GET_PIN(C, 0)
- #define LED1_PIN GET_PIN(C, 1)
- #define LED2_PIN GET_PIN(C, 2)
- #define LED3_PIN GET_PIN(C, 3)
- #define LED4_PIN GET_PIN(C, 4)
- #define LED5_PIN GET_PIN(C, 5)
- #define LED6_PIN GET_PIN(C, 6)
- #define LED7_PIN GET_PIN(C, 7)
- static int rt_hw_pin_init()
- {
- rt_pin_mode(LED0_PIN, PIN_MODE_OUTPUT);
- rt_pin_mode(LED1_PIN, PIN_MODE_OUTPUT);
- rt_pin_mode(LED2_PIN, PIN_MODE_OUTPUT);
- rt_pin_mode(LED3_PIN, PIN_MODE_OUTPUT);
- rt_pin_mode(LED4_PIN, PIN_MODE_OUTPUT);
- rt_pin_mode(LED5_PIN, PIN_MODE_OUTPUT);
- rt_pin_mode(LED6_PIN, PIN_MODE_OUTPUT);
- rt_pin_mode(LED7_PIN, PIN_MODE_OUTPUT);
- return 0;
- }
- INIT_BOARD_EXPORT(rt_hw_pin_init);
- /* 定时器超时回调函数 */
- static rt_err_t timeout_cb1(rt_device_t dev, rt_size_t size)
- {
- static int i = 0;
- i++;
- if (i % 2)
- rt_pin_write(LED0_PIN, PIN_LOW);
- else
- rt_pin_write(LED0_PIN, PIN_HIGH);
- LOG_D("%d",i);
- return 0;
- }
- /* 定时器超时回调函数 */
- static rt_err_t timeout_cb2(rt_device_t dev, rt_size_t size)
- {
- static int i = 0;
- i++;
- if (i % 2)
- rt_pin_write(LED1_PIN, PIN_LOW);
- else
- rt_pin_write(LED1_PIN, PIN_HIGH);
- return 0;
- }
- /* 定时器超时回调函数 */
- static rt_err_t timeout_cb3(rt_device_t dev, rt_size_t size)
- {
- static int i = 0;
- i++;
- if (i % 2)
- rt_pin_write(LED2_PIN, PIN_LOW);
- else
- rt_pin_write(LED2_PIN, PIN_HIGH);
- return 0;
- }
- /* 定时器超时回调函数 */
- static rt_err_t timeout_cb4(rt_device_t dev, rt_size_t size)
- {
- static int i = 0;
- i++;
- if (i % 2)
- rt_pin_write(LED3_PIN, PIN_LOW);
- else
- rt_pin_write(LED3_PIN, PIN_HIGH);
- return 0;
- }
- /* 定时器超时回调函数 */
- static rt_err_t timeout_cb5(rt_device_t dev, rt_size_t size)
- {
- static int i = 0;
- i++;
- if (i % 2)
- rt_pin_write(LED4_PIN, PIN_LOW);
- else
- rt_pin_write(LED4_PIN, PIN_HIGH);
- return 0;
- }
- /* 定时器超时回调函数 */
- static rt_err_t timeout_cb9(rt_device_t dev, rt_size_t size)
- {
- static int i = 0;
- i++;
- if (i % 2)
- rt_pin_write(LED5_PIN, PIN_LOW);
- else
- rt_pin_write(LED5_PIN, PIN_HIGH);
- return 0;
- }
- /* 定时器超时回调函数 */
- static rt_err_t timeout_cb10(rt_device_t dev, rt_size_t size)
- {
- static int i = 0;
- i++;
- if (i % 2)
- rt_pin_write(LED6_PIN, PIN_LOW);
- else
- rt_pin_write(LED6_PIN, PIN_HIGH);
- return 0;
- }
- /* 定时器超时回调函数 */
- static rt_err_t timeout_cb11(rt_device_t dev, rt_size_t size)
- {
- static int i = 0;
- i++;
- if (i % 2)
- rt_pin_write(LED7_PIN, PIN_LOW);
- else
- rt_pin_write(LED7_PIN, PIN_HIGH);
- return 0;
- }
- static int hw1timer_sample(int argc, char *argv[])
- {
- rt_err_t ret = RT_EOK;
- rt_hwtimerval_t timeout_s; /* 定时器超时值 */
- rt_device_t hw_dev = RT_NULL; /* 定时器设备句柄 */
- rt_hwtimer_mode_t mode; /* 定时器模式 */
- /* 查找定时器设备 */
- hw_dev = rt_device_find("timer1");
- /* 以读写方式打开设备 */
- ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
- /* 设置超时回调函数 */
- rt_device_set_rx_indicate(hw_dev, timeout_cb1);
- /* 设置模式为周期性定时器 */
- mode = HWTIMER_MODE_PERIOD;
- ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
- /* 设置定时器超时值为5s并启动定时器 */
- timeout_s.sec = 1; /* 秒 */
- timeout_s.usec = 0; /* 微秒 */
- if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s))
- {
- rt_kprintf("set timeout value failed\n");
- return RT_ERROR;
- }
- return ret;
- }
- MSH_CMD_EXPORT(hw1timer_sample, hw1timer_sample);
- static int hw2timer_sample(int argc, char *argv[])
- {
- rt_err_t ret = RT_EOK;
- rt_hwtimerval_t timeout_s; /* 定时器超时值 */
- rt_device_t hw_dev = RT_NULL; /* 定时器设备句柄 */
- rt_hwtimer_mode_t mode; /* 定时器模式 */
- /* 查找定时器设备 */
- hw_dev = rt_device_find("timer2");
- /* 以读写方式打开设备 */
- ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
- /* 设置超时回调函数 */
- rt_device_set_rx_indicate(hw_dev, timeout_cb2);
- /* 设置模式为周期性定时器 */
- mode = HWTIMER_MODE_PERIOD;
- ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
- /* 设置定时器超时值为5s并启动定时器 */
- timeout_s.sec = 1; /* 秒 */
- timeout_s.usec = 0; /* 微秒 */
- if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s))
- {
- rt_kprintf("set timeout value failed\n");
- return RT_ERROR;
- }
- return ret;
- }
- MSH_CMD_EXPORT(hw2timer_sample, hw2timer_sample);
- static int hw3timer_sample(int argc, char *argv[])
- {
- rt_err_t ret = RT_EOK;
- rt_hwtimerval_t timeout_s; /* 定时器超时值 */
- rt_device_t hw_dev = RT_NULL; /* 定时器设备句柄 */
- rt_hwtimer_mode_t mode; /* 定时器模式 */
- /* 查找定时器设备 */
- hw_dev = rt_device_find("timer3");
- /* 以读写方式打开设备 */
- ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
- /* 设置超时回调函数 */
- rt_device_set_rx_indicate(hw_dev, timeout_cb3);
- /* 设置模式为周期性定时器 */
- mode = HWTIMER_MODE_PERIOD;
- ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
- /* 设置定时器超时值为5s并启动定时器 */
- timeout_s.sec = 1; /* 秒 */
- timeout_s.usec = 0; /* 微秒 */
- if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s))
- {
- rt_kprintf("set timeout value failed\n");
- return RT_ERROR;
- }
- return ret;
- }
- MSH_CMD_EXPORT(hw3timer_sample, hw3timer_sample);
- static int hw4timer_sample(int argc, char *argv[])
- {
- rt_err_t ret = RT_EOK;
- rt_hwtimerval_t timeout_s; /* 定时器超时值 */
- rt_device_t hw_dev = RT_NULL; /* 定时器设备句柄 */
- rt_hwtimer_mode_t mode; /* 定时器模式 */
- /* 查找定时器设备 */
- hw_dev = rt_device_find("timer4");
- /* 以读写方式打开设备 */
- ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
- /* 设置超时回调函数 */
- rt_device_set_rx_indicate(hw_dev, timeout_cb4);
- /* 设置模式为周期性定时器 */
- mode = HWTIMER_MODE_PERIOD;
- ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
- /* 设置定时器超时值为5s并启动定时器 */
- timeout_s.sec = 1; /* 秒 */
- timeout_s.usec = 0; /* 微秒 */
- if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s))
- {
- rt_kprintf("set timeout value failed\n");
- return RT_ERROR;
- }
- return ret;
- }
- MSH_CMD_EXPORT(hw4timer_sample, hw4timer_sample);
- static int hw5timer_sample(int argc, char *argv[])
- {
- rt_err_t ret = RT_EOK;
- rt_hwtimerval_t timeout_s; /* 定时器超时值 */
- rt_device_t hw_dev = RT_NULL; /* 定时器设备句柄 */
- rt_hwtimer_mode_t mode; /* 定时器模式 */
- /* 查找定时器设备 */
- hw_dev = rt_device_find("timer5");
- /* 以读写方式打开设备 */
- ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
- /* 设置超时回调函数 */
- rt_device_set_rx_indicate(hw_dev, timeout_cb5);
- /* 设置模式为周期性定时器 */
- mode = HWTIMER_MODE_PERIOD;
- ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
- /* 设置定时器超时值为5s并启动定时器 */
- timeout_s.sec = 1; /* 秒 */
- timeout_s.usec = 0; /* 微秒 */
- if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s))
- {
- rt_kprintf("set timeout value failed\n");
- return RT_ERROR;
- }
- return ret;
- }
- MSH_CMD_EXPORT(hw5timer_sample, hw5timer_sample);
- static int hw9timer_sample(int argc, char *argv[])
- {
- rt_err_t ret = RT_EOK;
- rt_hwtimerval_t timeout_s; /* 定时器超时值 */
- rt_device_t hw_dev = RT_NULL; /* 定时器设备句柄 */
- rt_hwtimer_mode_t mode; /* 定时器模式 */
- /* 查找定时器设备 */
- hw_dev = rt_device_find("timer9");
- /* 以读写方式打开设备 */
- ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
- /* 设置超时回调函数 */
- rt_device_set_rx_indicate(hw_dev, timeout_cb9);
- /* 设置模式为周期性定时器 */
- mode = HWTIMER_MODE_PERIOD;
- ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
- /* 设置定时器超时值为5s并启动定时器 */
- timeout_s.sec = 1; /* 秒 */
- timeout_s.usec = 0; /* 微秒 */
- if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s))
- {
- rt_kprintf("set timeout value failed\n");
- return RT_ERROR;
- }
- return ret;
- }
- MSH_CMD_EXPORT(hw9timer_sample, hw9timer_sample);
- static int hw10timer_sample(int argc, char *argv[])
- {
- rt_err_t ret = RT_EOK;
- rt_hwtimerval_t timeout_s; /* 定时器超时值 */
- rt_device_t hw_dev = RT_NULL; /* 定时器设备句柄 */
- rt_hwtimer_mode_t mode; /* 定时器模式 */
- /* 查找定时器设备 */
- hw_dev = rt_device_find("timer10");
- /* 以读写方式打开设备 */
- ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
- /* 设置超时回调函数 */
- rt_device_set_rx_indicate(hw_dev, timeout_cb10);
- /* 设置模式为周期性定时器 */
- mode = HWTIMER_MODE_PERIOD;
- ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
- /* 设置定时器超时值为5s并启动定时器 */
- timeout_s.sec = 1; /* 秒 */
- timeout_s.usec = 0; /* 微秒 */
- if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s))
- {
- rt_kprintf("set timeout value failed\n");
- return RT_ERROR;
- }
- return ret;
- }
- MSH_CMD_EXPORT(hw10timer_sample, hw10timer_sample);
- static int hw11timer_sample(int argc, char *argv[])
- {
- rt_err_t ret = RT_EOK;
- rt_hwtimerval_t timeout_s; /* 定时器超时值 */
- rt_device_t hw_dev = RT_NULL; /* 定时器设备句柄 */
- rt_hwtimer_mode_t mode; /* 定时器模式 */
- /* 查找定时器设备 */
- hw_dev = rt_device_find("timer11");
- /* 以读写方式打开设备 */
- ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
- /* 设置超时回调函数 */
- rt_device_set_rx_indicate(hw_dev, timeout_cb11);
- /* 设置模式为周期性定时器 */
- mode = HWTIMER_MODE_PERIOD;
- ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
- /* 设置定时器超时值为5s并启动定时器 */
- timeout_s.sec = 1; /* 秒 */
- timeout_s.usec = 0; /* 微秒 */
- if (rt_device_write(hw_dev, 0, &timeout_s, sizeof(timeout_s)) != sizeof(timeout_s))
- {
- rt_kprintf("set timeout value failed\n");
- return RT_ERROR;
- }
- return ret;
- }
- MSH_CMD_EXPORT(hw11timer_sample, hw11timer_sample);
注意,定时器1的定时会快一倍(这里是1s的间隔,但定时器1会500ms进一次中断),尚不清楚是rt-thread的库造成的还是硬件本身时钟相关的原因,后续在研究。
————————————————
版权声明:小盼你最萌哒
如有侵权请联系删除
|
 微信公众号
微信公众号
 手机版
手机版