|
转载自:http://www.51hei.com/bbs/dpj-39885-1.html 我是瑞生,毫无保留的给大家透露电子设计经验,不定时分享实用的落地的电子设计技巧,希望能够帮助到大家。 今天说一下STM32单片机的接收不定长度字节数据的方法。由于STM32单片机带IDLE中断,所以利用这个中断,可以接收不定长字节的数据,由于STM32属于ARM单片机,所以这篇文章的方法也适合其他的ARM单片机。; I9 d9 T" f. o' j7 f IDLE中断什么时候发生?& Z! k8 M% Z1 g/ `5 ~, L IDLE就是串口收到一帧数据后,发生的中断。什么是一帧数据呢?比如说给单片机一次发来1个字节,或者一次发来8个字节,这些一次发来的数据,就称为一帧数据,也可以叫做一包数据。 如何判断一帧数据结束,就是我们今天讨论的问题。因为很多项目中都要用到这个,因为只有接收到一帧数据以后,你才可以判断这次收了几个字节和每个字节的内容是否符合协议要求。; ~* H+ H* ^. g1 }! M! Z 看了前面IDLE中断的定义,你就会明白了,一帧数据结束后,就会产生IDLE中断。这个中断真是太TMD有用了。省去了好多判断的麻烦。6 `9 t0 o) l- h- t/ A" f 如何配置好IDLE中断?- ?0 B; m& ^& P 下面我们就配置好串口IDLE中断吧。  0 ?3 c& s, U" {0 c5 h6 B 0 ?3 c& s, U" {0 c5 h6 B这是串口CR1寄存器,其中,对bit4写1开启IDLE中断,对bit5写1开启接收数据中断。(注意:不同系列的STM32,对应的寄存器位可能不同)9 {2 ]& c& p0 f/ I: R/ y# n3 G (RXNE中断和IDLE中断的区别? 当接收到1个字节,就会产生RXNE中断,当接收到一帧数据,就会产生IDLE中断。比如给单片机一次性发送了8个字节,就会产生8次RXNE中断,1次IDLE中断。), j+ |! t1 W+ u! s& q3 w1 C ) ~" U& A2 c D& U 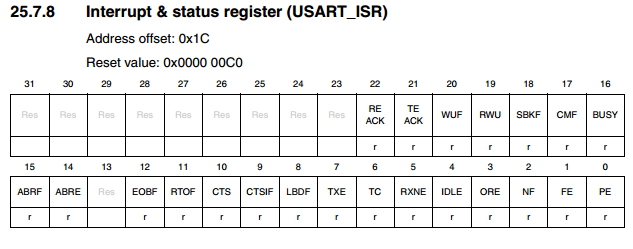 这是状态寄存器,当串口接收到数据时,bit5就会自动变成1,当接收完一帧数据后,bit4就会变成1. 需要注意的是,在中断函数里面,需要把对应的位清0,否则会影响下一次数据的接收。比如RXNE接收数据中断,只要把接收到的一个字节读出来,就会清除这个中断。IDLE中断,如何是F0系列的单片机,需要用ICR寄存器来清除,如果是F1系列的单片机,清除方法是“先读SR寄存器,再读DR寄存器”。(我怎么知道?手册上写的) 下面以STM32F103为例给出源程序。- X9 j- G4 Y M: f. g6 e( v 我们先来看程序中的主要部分。 串口初始化函数片段  如果你原来的串口初始化函数具有打开串口接收中断的话,实际上就是在初始化函数中多了一条打开空闲中断的语句。6 U+ v+ x4 Y L6 P 串口中断函数 ) _8 m5 {: C4 p; d' O: t% p \9 R 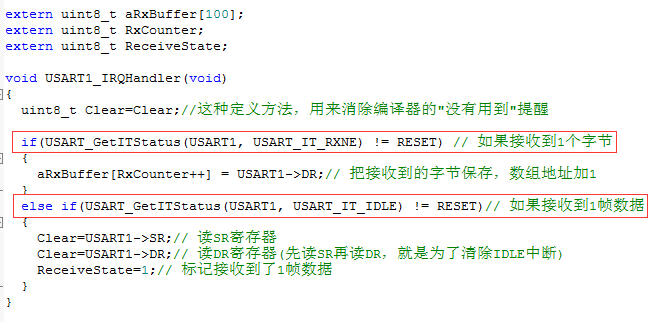 . p* F$ q( }" A3 r . p* F$ q( }" A3 r串口中断函数里面,最重要的两条语句,就是上图中圈出来的两条语句。第一条语句用来判断是否接收到1个字节,第二条语句用来判断是否接收到1帧数据。(是不是感觉超级方便?妈妈再也不用担心我如何判断是否接收完1帧数据了。)* F# r2 J5 N6 m( T! s' k1 _ 主函数1 m# ^3 x6 g7 F; p 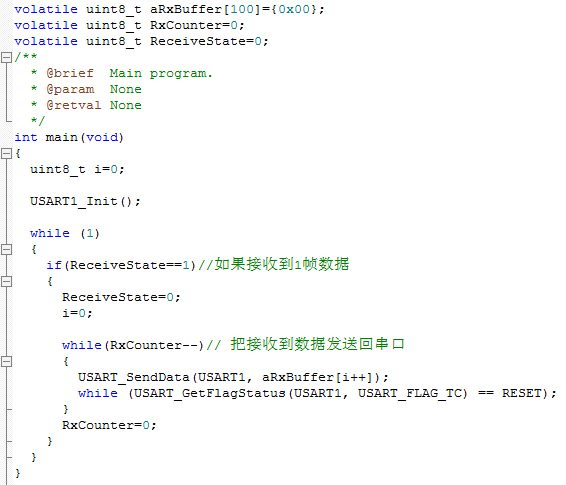 我写的这个主函数,是用来验证接收的正确性的。RxCounter表示的是这一帧数据有几个字节,接收完一帧数据,会在中断函数里面把ReceiveState置1,然后,通过串口把接收到的数据发送回串口。这样,既验证了接收了多少字节的正确性,又验证了接收到的数据是否正确。 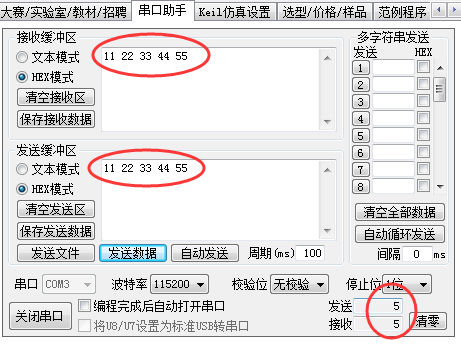 上图是结果验证3 |. ?2 W5 r6 J3 ] 以下是部分源代码。7 Z! W, I4 ?; \* q4 \" d /**, I( T1 g* R' Y4 s ****************************************************************************** * @file 串口接收不定长字节数据4 {$ ]5 F8 o, B * @author 瑞生) C; m2 c- y& P5 Q7 ^ |# ]$ k * @version V1.0 * @date 2015.10.23 * @brief Main program body ******************************************************************************& y5 y3 V E# v2 U2 S ****************************************************************************** */ : O2 y2 z" L; t0 D% s' ?5 ~ /* Includes ------------------------------------------------------------------*/ #include "stm32f10x.h" #include "uart.h"$ I* b0 z& e9 I4 T) [* @ volatile uint8_t aRxBuffer[100]={0x00}; volatile uint8_t RxCounter=0; volatile uint8_t ReceiveState=0; /**3 O. U' @7 s* y# g3 k7 _. r3 D * @brief Main program. * @param None * @retval None */ int main(void)8 g ~- U0 Y+ I2 o; ?( O$ C8 ? {7 M! w4 ]3 t5 H3 h uint8_t i=0;* `* p/ r5 M' A; | & b' g9 d' I' T6 f4 M' H( ? USART1_Init(); 1 n. Q2 H ~5 I1 Y- k \$ F while (1). p2 E# u$ s' F% X+ o! y0 Q { if(ReceiveState==1)//如果接收到1帧数据- F1 C1 o. K" C {0 R9 \7 s0 n; f+ `% j/ [ ReceiveState=0;& I. s0 U& m& ~2 K: g i=0; while(RxCounter--)// 把接收到数据发送回串口 {* |& C4 A4 |7 W" X USART_SendData(USART1, aRxBuffer[i++]); while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET); } RxCounter=0;* M( i8 L* P2 Y3 t& c8 Y }+ i4 H: j% C( U3 N$ n2 b& h } } + e$ f- z o1 \* v2 [0 w0 j |

STM32串å£æ¥æ¶ä¸å®é¿æ°æ®ç¨åº.rar
下载1.72 MB, 下载次数: 74
【管管推荐】STM32经验分享篇
STM32固件库分享,超全系列整理
小马哥STM32F103开源小四轴RoboFly全部资料大放送
【MCU实战经验】+STM32F107的USB使用
基于STM32F103两轮平衡小车设计(开源)
STM32F107VCT6官方原理图和PCB
【福利】用STM32库的朋友有福了:STM32F10x_StdPeriph_Lib_V3.5.0chm...
基于STM32F10xx存储器和系统架构经验分享
基于STM32F1的CAN通信之BH1750
基于STM32F1的CAN通信之OLED












不用特别处理,这个例子本身就是发送接收的16进制