|
本文分析STM32单片机到底是如何软硬件结合的,分析单片机程序如何编译,运行。 软硬件结合 初学者,通常有一个困惑,就是为什么软件能控制硬件?就像当年的51,为什么只要写P1=0X55,就可以在IO口输出高低电平?要理清这个问题,先要认识一个概念:地址空间。 寻址空间 什么是地址空间呢?所谓的地址空间,就是PC指针的寻址范围,因此也叫寻址空间。 大家应该都知道,我们的电脑有32位系统和64位系统之分,为什么呢?因为32位系统,PC指针就是一个32位的二进制数,也就是0xffffffff,范围只有4G寻址空间。现在内存越来越大,4G根本不够,所以需要扩展,为了能访问超出4G范围的内存,就有了64位系统。STM32是多少位的?是32位的,因此PC指针也是32位,寻址空间也就是4G。 我们来看看STM32的寻址空间是怎么样的。在数据手册《STM32F407_数据手册.pdf》中有一个图,这个图,就是STM32的寻址空间分配。所有的芯片,都会有这个图,名字基本上都是叫Memory map,用一个新芯片,就先看这个图。 
最左边,8个block,每个block 512M,总共就是4G,也就是芯片的寻址空间。 block 0 里面有一段叫做FLASH,也就是内部FLASH,我们的程序就是下载到这个地方,起始地址是0X800 0000,大家注意,这个只有1M空间。现在STM32已经有2M flash的芯片了,超出1M的FLASH放在哪里呢?请自行查看对应的芯片手册。 3 在block 1 内,有两段SRAM,总共128K,这个空间,也就是我们前面说的内存,存放程序使用的变量。如果需要,也可以把程序放到SRAM中运行。407不是有196K吗? 其实407有196K内存,但是有64k并不是普通的SRAM,而是放在block 0 内的CCM。这两段区域不连续,而且,CCM只能内核使用,外设不能使用,例如DMA就不能用CCM内存,否则就死机。 block 2,是Peripherals,也就是外设空间。我们看右边,主要就是APB1/APB2、AHB1/AHB2,什么东西呢?回头再说。 block 3、block4、block5,是FSMC的空间,FSMC可以外扩SRAM,NAND FALSH,LCD等外设。 好的,我们分析了寻址空间,我们回过头看看,软件是如何控制硬件的。对于这个疑惑,也可以看此文:代码是如何控制硬件的?在IO口输出的例程中,我们配置IO口是调用库函数,我们看看库函数是怎么做的。 例如:
这个函数其实就是对一个变量赋值,对GPIOx这个结构体的成员BSRRL赋值。
assert_param:这个是断言,用于判断输入参数是否符合要求GPIOx是一个输入参数,是一个GPIO_TypeDef结构体指针,所以,要用->获取其成员 GPIOx是我们传入的参数GPIOG,具体是啥?在stm32f4xx.h中有定义。
GPIOG_BASE同样在文件中有定义,如下:
再找找PERIPH_BASE的定义
这个外设空间地址的寄存器是IO口硬件的一部分。关于如下图STM32的GPIO文章推荐:STM32中GPIO工作原理详解。如下图,左边的输出数据寄存器,就是我们操作的寄存器(内存、变量),它的地址就是0X40000000+0X1800+0x14. 
控制其他外设也类似,就是将数据写到外设寄存器上,跟操作内存一样,就可控制外设了。 寄存器,其实应该是内存的统称,外设寄存器应该叫做特殊寄存器。慢慢的,所有人都把外设的叫做寄存器,其他的统称内存或RAM。寄存器为什么能控制硬件外设呢?因为,初略的说,一个寄存器的一个BIT,就是一个开关,开就是1,关就是0。通过这个电子开关去控制电路,从而控制外设硬件。 纯软件-包罗万象的小程序 我们已经完成了串口和IO口的控制,但是我们仅仅知道了怎么用,对其他一无所知。程序怎么跑的?关于程序是怎么在单片机运行的,也可以看此视频:动画演示单片机是如何跑程序的。代码到底放在那里?内存又是怎么保存的?下面,我们通过一个简单的程序,学习嵌入式软件的基本要素。 分析启动代码 函数从哪里开始运行? 每个芯片都有复位功能,复位后,芯片的PC指针(一个寄存器,指示程序运行位置,对于多级流水线的芯片,PC可能跟真正执行的指令位置不一致,这里暂且认为一致)会复位到固定值,一般是0x00000000,在STM32中,复位到0X08000004。因此复位后运行的第一条代码就是0X08000004。前面我们不是拷贝了一个启动代码文件到工程吗?startup_stm32f40_41xxx.s,这个汇编文件为什么叫启动代码?因为里面的汇编程序,就是复位之后执行的程序。在文件中,有一段数据表,称为中断向量,里面保存了各个中断的执行地址。复位,也是一个中断。 芯片复位时,芯片从中断表中将Reset_Handler这个值(函数指针)加载到PC指针,芯片就会执行Reset_Handler函数了。(一个函数入口就是一个指针)
Reset_Handler函数,先执行SystemInit函数,这个函数在标准库内,主要是初始芯片时钟。然后跳到__main执行,__main函数是什么函数? 是我们在main.c中定义的main函数吗?后面我们再说这个问题。 
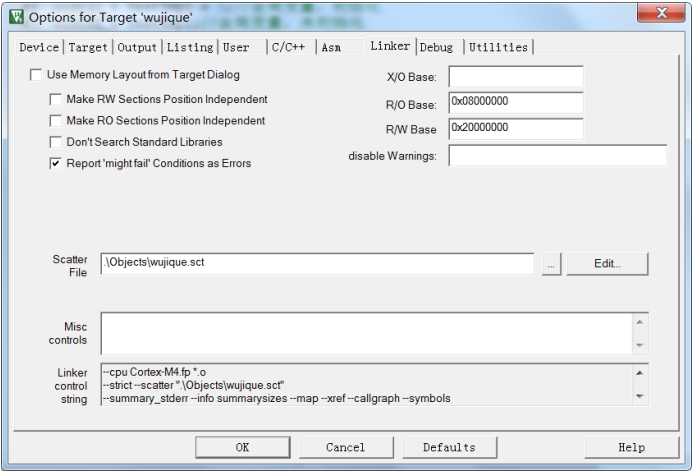
芯片是怎么知道开始就执行启动代码的呢?或者说,我们如何把这个启动代码放到复位的位置?这就牵涉到一个一般情况下不关注的文件wujique.sct,这个文件在wujique\prj\Objects目录下,通常把这个文件叫做分散加载文件,编译工具在链接时,根据这个文件放置各个代码段和变量。 在MDK软件Options菜单Linker下有关于这个菜单的设置。 
把Use Memory Layout from Target Dialog前面的勾去掉,之前不可设置的框都可以设置了。点击Edit进行编辑。 
在代码编辑框出现了分散加载文件内容,当前文件只有基本的内容。 其实这个文件功能很强大,通过修改这个文件可以配置程序的很多功能,例如:1 指定FLASH跟RAM的大小于起始位置,当我们把程序分成BOOT、CORE、APP,甚至进行驱动分离的时候,就可以用上了。2 指定函数与变量的位置,例如把函数加载到RAM中运行。 
从这个基本的分散加载文件我们可以看出: 第6行 ER_IROM1 0x08000000 0x00080000定义了ER_IROM1,也就是我们说的内部FLASH,从0x08000000开始,大小0x00080000。 第7行.o (RESET, +First)从0x08000000开始,先放置一个.o文件, 并且用(RESET, +First)指定RESET块优先放置,RESET块是什么?请查看启动代码,中断向量就是一个AREA,名字叫RESET,属于READONLY。这样编译后,RESET块将放在0x08000000位置,也就是说,中断向量就放在这个地方。DCD是分配空间,4字节,第一个就是__initial_sp,第二个就是Reset_Handler函数指针。也就是说,最后编译后的程序,将Reset_Handler这个函数的指针(地址),放在0x800000+4的地方。所以芯片在复位的时候,就能找到复位函数Reset_Handler。 第8行 *(InRoot$$Sections)什么鬼?GOOGLE啊!回头再说。 第9行 .ANY (+RO)意思就是其他的所有RO,顺序往后放。就是说,其他代码,跟着启动代码后面。 第11行 RW_IRAM1 0x20000000 0x00020000定义了RAM大小。 第12行 .ANY (+RW +ZI)所有的RW ZI,全部放到RAM里面。RW,ZI,也就是变量,这一行指定了变量保存到什么地址。 分析用户代码 到此,基本启动过程已经分析完。下一步开始分析用户代码,就从main函数开始。 1 程序跳转到main函数后:RCC_GetClocksFreq获取RCC时钟频率;SysTick_Config配置SysTick,在这里打开了SysTick中断,10毫秒一次。Delay(5);延时50毫秒。
2 初始化IO就不说了,进入while(1),也就是一个死循环,嵌入式程序,都是一个死循环,否则就跑飞了。
3 在while(1)中调用TestFun函数,这个函数使用两个全局变量,两个局部变量。
然后程序就一直在main函数的while循环里面执行。中断呢?对,还有中断。中断中断,就是中断正常的程序执行流程。相关文章:STM32中断系统。我们查看Delay函数,uwTimingDelay不等于0就死等?谁会将uwTimingDelay改为0?
搜索uwTimingDelay变量,函数TimingDelay_Decrement会将变量一直减到0。
这个函数在哪里执行?经查找,在SysTick_Handler函数中运行。谁用这个函数?
经查找,在中断向量表中有这个函数,也即是说这个函数指针保存在中断向量表内。当发生中断时,就会执行这个函数。当然,在进出中断会有保存和恢复现场的操作。这个主要涉及到汇编,暂时不进行分析了。有兴趣自己研究研究。通常,现在我们开发程序不用关心上下文切换了。
余下问题 1 __main函数是什么函数?是我们在main.c中定义的main函数吗?2 分散加载文件中*(InRoot$$Sections)是什么?3 ZI段,也就是初始化为0的数据段,什么时候初始化?谁初始化? 为什么这几个问题前面留着不说?因为这是同一个问题。顺藤摸瓜! 通过MAP文件了解代码构成 编译结果 程序编译后,在下方的Build Output窗口会输出信息:
编译目标是wujique C文件compiling,汇编文件assembling,这个过程叫编译 编译结束后,就进行link,链接。 最后得到一个编译结果,9038字节code,RO 990,RW 40,ZI 6000。CODE,是代码,很好理解,那RO、RW、ZI都是什么? FromELF,创建hex文件,FromELF是一个好工具,需要自己添加到option中才能用 map文件配置 更多编译具体信息在map文件中,在MDK Options中我们可以看到,所有信息都放在\Listings\wujique.map 默认很多编译信息可能没钩,钩上所有信息会增加编译时间。 
map文件 打开map文件,好乱?习惯就好。我们抓重点就行了。 
map 总信息 从最后看起,看到没?最后的这一段map内容,说明了整个程序的基本概况。 有多少RO?RO到底是什么? 有多少RW?RW又是什么? ROM为什么不包括ZI Data?为什么包含RW Data? 
Image component sizes 往上,看看Image component sizes,这个就比刚刚的总体统计更细了。 这部分内容,说明了每个源文件的概况 首先,是我们自己的源码,这个程序我们的代码不多,只有main.o,wujique_log.o,和其他一些STM32的库文件。 
第2部分是库里面的文件,看到没?里面有一个main.o。main函数是不是我们写的main函数?明显不是,我们的main函数是放在main.o文件。这么小的一个工程,用了这么多库,你以前关注过吗?估计没有,除非你曾经将一个原本在1M flash上的程序压缩到能在512K上运行。 
第3部分也是库,暂时没去分析这两个是什么东西。 
库文件是什么?库文件就是别人已经别写好的代码库。在代码中,我们经常会包含一些头文件,例如: #include <stdarg.h> #include <stdlib.h> #include <string.h> 这些就是库的头文件。这些头文件保存在MDK开发工具的安装目录下。我们经常用的库函数有:memcpy、memcmp、strcmp等。只要代码中包含了这些函数,就会链接库文件。 文件map 再往上,就是文件MAP了,也就时每个文件中的代码段(函数)跟变量在ROM跟RAM中的位置。首先是ROM在0x08000000确实放的是startup_stm32f40_41xxx.o中的RESET 库文件是什么? 库文件就是别人已经别写好的代码库。 在代码中,我们经常会包含一些头文件,例如:
这些就是库的头文件。相关文章:C语言中的头文件。这些头文件保存在MDK开发工具的安装目录下。 我们经常用的库函数有:memcpy、memcmp、strcmp等。 只要代码中包含了这些函数,就会链接库文件。 文件map 再往上,就是文件MAP了,也就时每个文件中的代码段(函数)跟变量在ROM跟RAM中的位置。首先是ROM在0x08000000确实放的是startup_stm32f40_41xxx.o中的RESET 
每个文件有有多行,例如串口,4个函数。 
然后是RAM的,main.o中的变量,放在0x20000000,总共有0x0000000c,类型是Data、RW。串口有两种变量,data和bss,什么是bss?这两个名称,是section name,也就是段的意思。看前面type和Attr, RW Data,放在.data段;RW Zero放在.bss段,RW Zero,其实就是ZI。到底哪些变量是RW,哪些是ZI? 
Image Symbol Table 再往上就是Image Symbol Table,就更进一步到每个函数或者变量的信息了 
例如,全局变量TestTmp1,是Data,4字节,分配的位置是0x20000004。 
TestTmp3数组放在哪里?放在0X080024E0这个地方,这可是代码区额。因为我们用const修饰了这个全局变量数组,告诉编译器,这个数组是不可以改变的,编译器就将这个数组保存到代码中了。程序中我们经常会使用一些大数组数据,例如字符点阵,通常有几K几十K大,不可能也没必要放到RAM区,整个程序运行过程这些数据都不改变,因此通过const修饰,将其存放到代码区。 const的用处比较多,可以修饰变量,也可以修饰函数。更多用法自行学习 
那局部变量存放在哪里呢?我们找到了test_tmp3, 
没找到test_tmp1/test_tmp2,为什么呢?在定义时,test_tmp3增加了static定义,意思就是静态局部变量,功能上,相当于全局变量,定义在函数内,限制了这个全局变量只能在这个函数内使用。哪test_tmp1、test_tmp2放在哪里呢? 局部变量,在编译链接时,并没有分配空间,只有在运行时,才从栈分配空间。
上一部分,我们留了一个问题,哪些变量是RW,哪些是ZI?我们看看串口变量的情况,UartBuf3放在bss段,其他变量放在.data段。为什么数组就放在bss?bss是英文Block Started by Symbol的简称。 
到这里,我们可解释下面几个概念了: Code就是代码,函数。 RO Data,就是只读变量,例如用const修饰的数组。 RW Data,就是读写变量,例如全局变量跟static修饰的局部变量。 ZI Data,就是系统自动初始化为0的读写变量,大部分是数组,放在bss段。 RO Size等于代码加只读变量。 RW Size等于读写变量(包括自动初始化为0的),这个也就是RAM的大小。 ROM Size,也就是我们编译之后的目标文件大小,也就是FLASH的大小。但是?为什么会包含RW Data呢?因为所有全局变量都需要一个初始化的值(就算没有真正初始化,系统也会分配一个初始化空间),例如我们定义一个变量u8 i = 8;这样的全局变量,8,这个值,就需要保存在FALSH区。 
我们看看函数的情况,前面我们不是有一个问题吗?__main和main是一个函数吗?查找main后发现,main是main,放在0x08000579 
main是main,放在0x08000189 
__main到main之间发生了什么?还记得分散加载文件中的这句吗? *(InRoot$$Sections) __main就在这个段内。下图是__main的地址,在0x08000189。__Vectors就是中断向量,放在最开始。 
在分散加载文件中,紧跟RESET的就是*(InRoot$$Sections)。 
而且,RESET段正好大小0x00000188。 
巧合?可以参考PPT文档《ARM嵌入式软件开发.ppt》。 
这一段代码都完成什么功能呢?主要完成ZI代码的初始化,也就是将一部分RAM初始化为0。其他环境初始化…… 最后 到这里,一个程序,是怎么组成的,程序是如何运行的,基本有一个总体印象了。 转载自: [color=var(--weui-LINK)][url=]STM32嵌入式开发[/url] 如有侵权请联系删除 |
实战经验 | LAT1578 SAU对NSC分区的影响
【板卡测评】STEVAL-STWINKT1B 上电后任意工具读出 ACC/GYRO/MAG 实时数据并截图
F429I-DISC1体验报告(1)久经沙场,锋芒依旧丨TouchGFX开发F429丨国庆开发板测评活动
实战经验 | KEIL环境下printf导致程序无法执行的解决方案
经验分享 | 程序换个IDE就不运行了?
经验分享 | 常被误解的开、关总中断话题
【STM32U3评测】SPIDMA发送
【STM32U3评测】实现双通道串口通信系统
实战经验 | RT-Thread环境下Flash错误标志问题解析
OpenBLT移植到STM32F405开发板
 微信公众号
微信公众号
 手机版
手机版