功能
使用普中科技STM32-PZ6806D开发板上的按键控制电机正反转,启动,停止,PWM输出波接在开发板的LED灯上查看效果。不仅限于使用这款开发板,修改引脚配置即可。
硬件
1.普中科技STM32-PZ6806D开发板,核心STM32F103ZET6。
2.L298n电机驱动模块。
3.直流电机。
连接

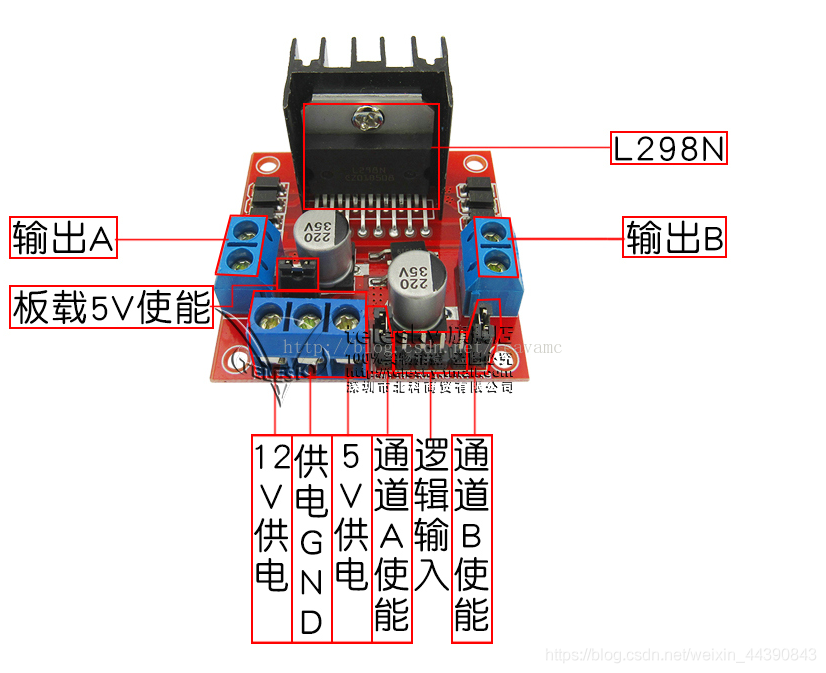
1.模块可驱动两路直流电机,输出A接及B各接一直流电机即可
2.若使用12V供电,将12V供电端口及GND接上电源正负即可。
3.若不需要使用PWM调速,只需要控制电机正反转,则逻辑A与B跳线帽插上即可,相当于始终使能。
4.若需要使用PWM调速,需将跳线帽拔起,将使能端接上单片机IO口。
5.逻辑输入四个端口IN1、IN2、IN3、IN4接单片机四个IO口,每两个端口控制的一路电机。

如图为L298n使电机正反停的逻辑,简单地说,当控制单片机IN1所连接引脚为高电平,与IN2连接的引脚为低电平时,输出A端使电机正转,其他情况见上表。
代码(基于正点原子)
motor.c 电机的控制
- <font face="微软雅黑" size="3">#include "motor.h"
- #include "stm32f10x.h"
- #include "stm32f10x_rcc.h"
- #include "delay.h"
- void Motor_12_Config(void) //管脚配置
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOC, ENABLE);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOC, &GPIO_InitStructure);
- GPIO_ResetBits(GPIOC,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3);
- }
-
- void Motor_1_STOP(void) //电机1停止
- {
- GPIO_ResetBits(GPIOC,GPIO_Pin_0);
- GPIO_ResetBits(GPIOC,GPIO_Pin_1);
- }
- void Motor_1_PRun(void) //电机1正转
- {
- GPIO_SetBits(GPIOC,GPIO_Pin_0);
- GPIO_ResetBits(GPIOC,GPIO_Pin_1);
- }
- void Motor_1_NRun(void) //电机1反转
- {
- GPIO_SetBits(GPIOC,GPIO_Pin_1);
- GPIO_ResetBits(GPIOC,GPIO_Pin_0);
- }
- **。。。。。 //同理配置电机2**</font>
- <font face="微软雅黑" size="3">//TIM3 PWM部分初始化
- //PWM输出初始化
- //arr:自动重装值
- //psc:时钟预分频数
- void TIM3_PWM_Init(u16 arr,u16 psc)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
-
- GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE); //Timer3完全重映射 TIM3_CH2->PC7
-
- //设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOC.7
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //TIM_CH2
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIO
- //初始化TIM3
- TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
- TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
- //初始化TIM3 Channel2 PWM模式
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
- TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
- TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
-
- TIM_Cmd(TIM3, ENABLE); //使能TIM3
- <b>}
- </b></font>
- <font face="微软雅黑" size="3">//外部中断0服务程序
- void EXTIX_Init(void)
- {
-
- EXTI_InitTypeDef EXTI_InitStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- KEY_Init(); // 按键端口初始化
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能复用功能时钟
-
- //GPIOE.2 中断线以及中断初始化配置 下降沿触发
- GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource2);
- EXTI_InitStructure.EXTI_Line=EXTI_Line2; //KEY_LEFT
- EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
- EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
- EXTI_InitStructure.EXTI_LineCmd = ENABLE;
- EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
- //GPIOE.3 中断线以及中断初始化配置 下降沿触发 //KEY_DOWN
- GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource3);
- EXTI_InitStructure.EXTI_Line=EXTI_Line3;
- EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
- //GPIOE.4 中断线以及中断初始化配置 下降沿触发 //KEY_RIGHT
- GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource4);
- EXTI_InitStructure.EXTI_Line=EXTI_Line4;
- EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
- //GPIOA.0 中断线以及中断初始化配置 上升沿触发 PA0 KEY_UP
- GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource0);
- EXTI_InitStructure.EXTI_Line=EXTI_Line0;
- EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
- EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
- NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //使能按键KEY_UP所在的外部中断通道
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级2,
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x03; //子优先级3
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
- NVIC_Init(&NVIC_InitStructure);
- 。
- 。
- 。//同理使能其他按键
- extern u8 key;
- //外部中断0服务程序
- void EXTI0_IRQHandler(void)
- {
- delay_ms(10);//消抖
- if(KEY_UP==1) //KEY_UP按键
- {
- key=1;
- }
- EXTI_ClearITPendingBit(EXTI_Line0); //清除LINE0上的中断标志位
- }
- 。
- 。
- 。//同理外部中断2、3、4
- //还有按键及LED的引脚配置不再熬述</font>
- <font face="微软雅黑" size="3">#define KEY_UP GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0)//读取按键0
- #define KEY_DOWN GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3)//读取按键1
- #define KEY_LEFT GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_2)//读取按键2
- #define KEY_RIGHT GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4)//读取按键3(WK_UP)
- </font>
- <font face="微软雅黑" size="3">。
- 。
- 。
- u8 key = 0;
- int main(void)
- {
- delay_init(); //延时函数初始化
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响 应优先级
- KEY_Init();
- LED_Init(); //LED端口初始化
- TIM3_PWM_Init(899,0); //不分频。PWM频率=72000000/900=80Khz
- Motor_12_Config();
- TIM_SetCompare2(TIM3,50);
- EXTIX_Init();
- while(key!=3)
- {
- GPIO_ResetBits(GPIOC,GPIO_Pin_5);
- }
- GPIO_SetBits(GPIOC,GPIO_Pin_5);
- while (1)
- {
- if (key==1)
- {Motor_1_PRun();
- Motor_2_PRun()
- }
- else if (key==2)
- {
- Motor_1_NRun();
- Motor_2_NRun();
- }
- else if (key==4)
- {
- Motor_1_STOP();
- Motor_2_STOP();
- }
- }
-
- } </font>
|
.png) STMCU小助手
发布时间:2021-7-15 14:36
STMCU小助手
发布时间:2021-7-15 14:36
 微信公众号
微信公众号
 手机版
手机版