.png) STMCU小助手
发布时间:2021-12-9 10:46
STMCU小助手
发布时间:2021-12-9 10:46
|
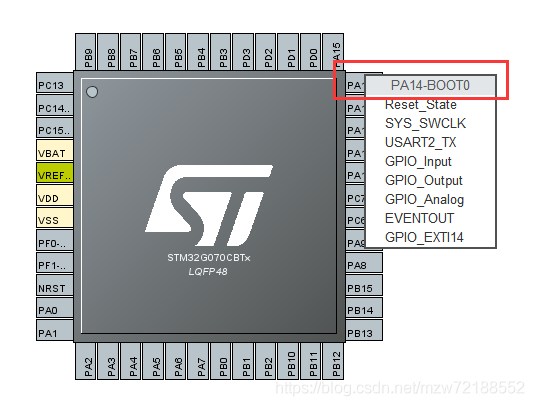
我们知道,STM32一般可以通过BOOT0和BOOT1的不同组合来设置启动方式。 之前用过STM32G070CBT6,这个芯片的BOOT0是和PA14在一起的: 
这个比较简单,我们知道PA13和PA14是芯片的SWD接口,我们只需要在这个引脚上下拉一个100K的电阻即可。这样,SWD功能和BOOT0的功能都兼顾到了,系统复位或者启动的时候,检测到PA14-BOOT0的电平为低电平,然后正常启动之后,这个引脚可以作为IO或者SWD功能使用。 但是对于新使用的STM32G431KBU6来说,上述的方法就行不通了,如下图: 
从上面CUBE MX 的引脚图中也可以看到,31脚的名称叫做PB8-BOOT0,我在一个设计中把PB7和PB8当作硬件IIC使用,这就需要给这两个引脚外挂4.7K上拉电阻。而按照通常的启动方式来看,我们要从主flash启动,需要启动时BOOT0引脚的电平为地电平,而IIC总线外挂了4.7K上拉电阻,使得无论如何都不能让启动瞬间这个引脚电平为低电平。 这时候不要怕,我们翻看手册DS12589,可以看到: 
也就是说BOOT0我们可以通过PB8-BOOT0这个引脚来设置,也可以通过Option Byte中的nBOOT0 option bit来设置,现在我们不能通过前者来设置,只能通过Option Byte中的nBOOT0 option bit来设置系统的启动方式了。 我们在用户参考手册RM0440中可以看到: 
需要通过把nSWBOOT0位设置为0来选择使用软件BOOT0而不是使用PB8-BOOT0来作为BOOT0的设置项,接下来把nBOOT0位设置为0就可以达到和使用PB8-BOOT0下拉到地一样的启动效果。 另外需要注意的地方是用户参考手册RM0440的这个位置: 
以及 
以上是涉及到软件设置BOOT0的一些相关寄存器及说明,接下来说怎么设置。 有三个办法可以实现把BOOT0设置为软件BOOT0,这样PB8-BOOT0引脚就可以当作通用GPIO或者IIC或者其他用途来使用了。 1、在程序中对Option Byte选项字的相关位进行编程,设置BOOT0为软件BOOT0,我看到HAL库中有相关操作,但是操作起来比较麻烦。 2、使用STM32CubeProgrammer来操作,这个软件可以通过STLINK\UART\USB\OTA来连接目标板来实现修改的功能。 3、使用STM32 ST-LINK Utility来操作,这个只能通过STLINK来连接目标板,连接上之后,点击Target,然后点击Option Bytes之后,按照下图修改即可实现目的: 
|
实战经验 | ClassB功能安全认证代码与应用代码分区的实现要点
STM32G0 系列 I2C 通信异常典型案例分析与解决方案总结
经验分享 | LAT1490 两个STM32G0 I2C 通信异常的案例分析
经验分享 | STM32G0 I2C bootloader Go 命令后调试连接失败:DBG_SWEN 位复位修复
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
如何在STM32和Arduino上实现卷积神经网络
STM32与51单片机差异一文速览
STM32芯片命名规则
STM32 引脚到底有多少?为什么一个引脚能当好几个用?
 微信公众号
微信公众号
 手机版
手机版