.png) STMCU小助手
发布时间:2021-12-15 11:00
STMCU小助手
发布时间:2021-12-15 11:00
|
第八章 按键输入实验 使用 STM32F7 的 IO 口作为输入用。在本章中,我们将利用板载的 3 个按键,来控制板载的两个 LED 的亮灭。通过本章的学习,你将了解到 STM32F7 的 IO 口作为输入口的使用方法。本章分为如下几个小节:
8.1 STM32F7 IO 口简介 STM32F7 的 IO 口在上一章已经有了比较详细的介绍,这里我们不再多说。STM32F7 的 IO 口做输入使用的时候,是通过调用函数 HAL_GPIO_ReadPin ()来读取 IO 口的状态的。了解了这 点,就可以开始我们的代码编写了。 这一章,我们将通过 ALIENTEK 水星 STM32 开发板上载有的 4 个按钮(KEY_UP、KEY0、 KEY1 和 KEY2),来控制板上的 2 个 LED(DS0 和 DS1),其中 KEY_UP 控制 DS0,DS1 互斥 点亮;KEY2 控制 DS0,按一次亮,再按一次灭;KEY1 控制 DS1,效果同 KEY2;KEY0 则同 时控制 DS0 和 DS1,按一次,他们的状态就翻转一次。 8.2 硬件设计 本实验用到的硬件资源有: 1) 指示灯 DS0、DS1。 2) 4 个按键:KEY0、KEY1、KEY2、和 KEY_UP。 DS0、DS1 和 STM32F767 的连接在上一章已经介绍过了,在水星 STM32 开发板上的按键 KEY0 连接在 PH3 上、KEY1 连接在 PH2 上、KEY2 连接在 PC13 上、KEY_UP 连接在 PA0 上。 如图 7.2.1 所示:  图 8.2.1 按键与 STM32F767 连接原理图 这里需要注意的是:KEY0 和 KEY1 是低电平有效的,而 KEY_UP 是高电平有效的,并且 外部都没有上下拉电阻,所以,需要在 STM32F767 内部设置上下拉。 8.3 软件设计 从这章开始,我们的软件设计主要是通过直接打开我们光盘的实验工程,而不再讲解怎么 加入文件和头文件目录。工程中添加相关文件的方法在我们前面实验已经讲解非常详细。 打开按键实验工程可以看到,工程引入了 key.c 文件以及头文件 key.h。下面我们首先打开 key.c 文件,关键代码如下:
这段代码包含 2 个函数,void KEY_Init(void)和 u8 KEY_Scan(u8 mode),KEY_Init 是用来 初始化按键输入的 IO 口的。实现 PA0、PC13、PH2 和 PH3 的输入设置,这里和第六章的输出 配置差不多,只是这里用来设置成的是输入而第六章是输出。 KEY_Scan 函数,则是用来扫描这 4 个 IO 口是否有按键按下。KEY_Scan 函数,支持两种 扫描方式,通过 mode 参数来设置。 当 mode 为 0 的时候,KEY_Scan 函数将不支持连续按,扫描某个按键,该按键按下之后必 须要松开,才能第二次触发,否则不会再响应这个按键,这样的好处就是可以防止按一次多次 触发,而坏处就是在需要长按的时候比较不合适。 当 mode 为 1 的时候,KEY_Scan 函数将支持连续按,如果某个按键一直按下,则会一直返 回这个按键的键值,这样可以方便的实现长按检测。 有了 mode 这个参数,大家就可以根据自己的需要,选择不同的方式。这里要提醒大家, 因为该函数里面有 static 变量,所以该函数不是一个可重入函数,在有 OS 的情况下,这个大家 要留意下。同时还有一点要注意的就是,该函数的按键扫描是有优先级的,最优先的是 KEY0, 第二优先的是 KEY1,最后是 KEY_UP 按键。该函数有返回值,如果有按键按下,则返回非 0 值,如果没有或者按键不正确,则返回 0。 接下来我们看看头文件 key.h 里面的代码:
这段代码里面最关键就是 4 个宏定义: #define KEY0 HAL_GPIO_ReadPin(GPIOH,GPIO_PIN_3) //KEY0 按键 PH3 #define KEY1 HAL_GPIO_ReadPin(GPIOH,GPIO_PIN_2) //KEY1 按键 PH2 #define WK_UP HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) //WKUP 按键 PA0 这里使用的是调用 HAL 库函数 HAL_GPIO_ReadPin 来实现读取某个 IO 口的输入电平。函 数 HAL_GPIO_ReadPin 的使用方法在上一章跑马灯实验我们已经讲解,这里我们就不累赘了。 在 key.h 中,我们还定义了 KEY0_PRES / KEY1_PRES//WKUP_PRESS 等 4 个宏定义,分 别对应开发板四个按键(KEY0/KEY1/KEY_UP)按键按下时 KEY_Scan 返回的值。通过宏定义 的方式判断返回值,方便大家记忆和使用。 最后,我们看看 main.c 里面编写的主函数代码如下:
主函数代码比较简单,先进行一系列的初始化操作,然后在死循环中调用按键扫描函数 KEY_Scan()扫描按键值,最后根据按键值控制 LED 的状态。
8.4 下载验证 同样,我们还是通过 ST LINK 来下载代码,在下载完之后,我们可以按 KEY0、KEY1 和 KEY_UP 来看看 DS0 和 DS1 的变化,是否和我们预期的结果一致? 至此,我们的本章的学习就结束了。本章,作为 STM32F767 的入门第二个例子,介绍了 STM32F767 的 IO 作为输入的使用方法,同时巩固了前面的学习。希望大家在开发板上实际验 证一下,从而加深印象。
8.5 STM32CubeMX 配置 IO 口输出 上一章我们讲解了使用 STM32CubeMX 工具配置 GPIO 的一般方法。本章我们主要教大家 配置 IO 口为输入模式,操作方法和配置 IO 口为输出模式基本一致。这里我们就直接列出 IO 口配置截图,具体方法请参考 4.8 小节和上一章跑马灯实验。 根据 8.2 小节讲解,水星开发板上有 3 个按键,分别连接四个 IO 口 PA0,PH2 和 PH3。其 中 WK_UP 按键按下后对应的 PA0 输入为高电平,所以默认情况下,该 IO 口(PA0)要初始化 为下拉输入,其他 IO 口初始化为上拉输入即可。 使用 STM32CubeMX 打开光盘工程模板(双击工程目录的 Template.ioc),目录为“4,程 序源码标准例程-库函数版本实验 0-3 Template 工程模板-使用 STM32CubeMX 配置”。我们首 先在 IO 口引脚图上,依次设置四个 IO 口为输入模式 GPIO_Input。这里我们以 PA0 为例,操作 方法如下图 8.5.1 所示: 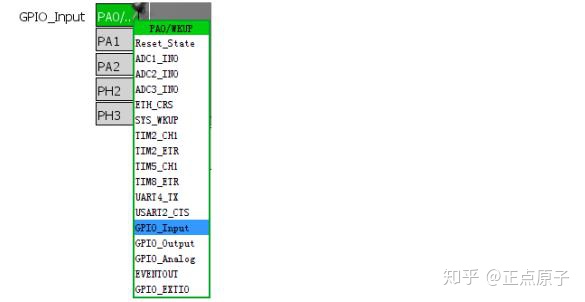 图 8.5.1 配置 PA0 为输入模式 同样的方法,我们依次配置 PH2 和 PH3 为输入模式。然后我们进入 Configuration->GPIO 配置界面,配置四个 IO 口详细参数。在配置界面点击 PA0 可以发现,当我们在前面设置 IO 口 为输入GPIO_Input之后,其配置参数只剩下模式GPIO Mode和上下拉GPIO Pull-up/Pull-down, 并且模式值中只有输入模式 Input Mode 可选。这里,我们配置 PA0 为下拉输入,其他三个 IO 口配置为上拉输入即可。配置方法如下图 8.5.2 所示: 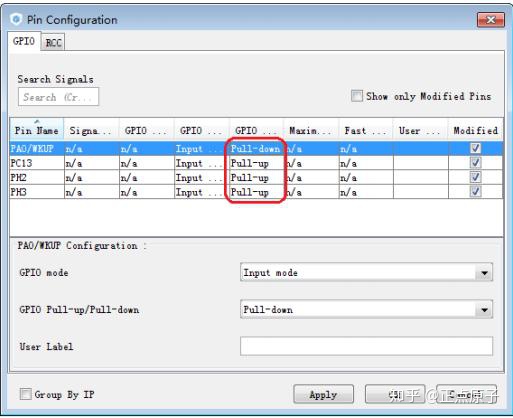 图 8.5.2 配置 IO 口详细参数 配置完成 IO 口参数之后,接下来我们同样生成工程。打开生成的工程会发现,main.c 文件 中添加了函数 MX_GPIO_Init 函数,内容如下:
该函数实现的功能和按键输入实验中 KEY_Init 函数实现的功能一模一样。有兴趣的同学可 以直接复制该函数内容替换按键输入实验中的 KEY_Init 函数内容,替换后会发现实现现象完全 一致。 使用 STM32CubeMX 配置 IO 口为输入模式方法就给大家介绍到这里。 |
STM32F745 USART1 Bootloader启动失败排查与解决的流程分析
STM32芯片命名规则
STM32 引脚到底有多少?为什么一个引脚能当好几个用?
入门嵌入式,为什么STM32是“优选起步”?
嵌入式-单片机-STM32 EXTI中断
STM32单片机进行除零运算,为何程序不崩溃?
STM32 LL为什么比HAL高效?
STM32时钟详解
2025国庆中秋活动体验报告2——TouchGFX的UI设计
2025国庆中秋活动体验报告1——TouchGFX环境配置
 微信公众号
微信公众号
 手机版
手机版










