|
串口调试在项目中被使用越来越多,串口资源的紧缺也变的尤为突出。很多本本人群,更是深有体会,不准备一个USB转串口工具就没办法进行开发。本章节来简单概述STM32低端芯片上的USB虚拟串口的移植。在官方DEMO中已经提供了现成的程序,这里对修改方法做简单说明。
首先打开官方demo我们开始进行移植,第一步复制我们可用的文件,操作如下: Projects\Virtual_COM_Port文件夹下,复制红线部分 图1
图2 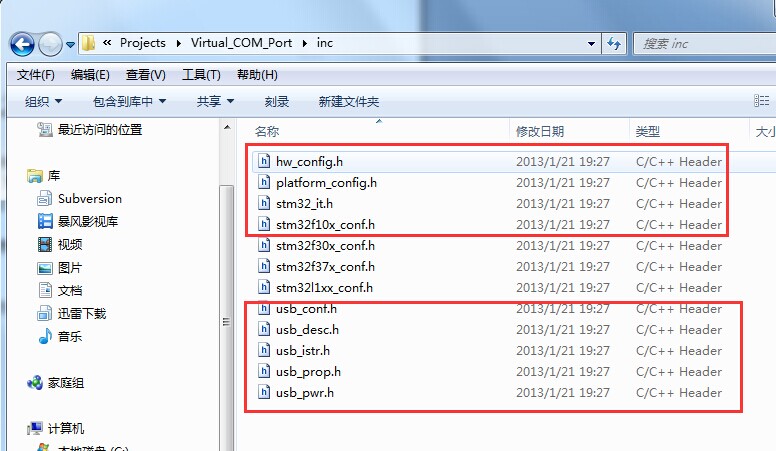
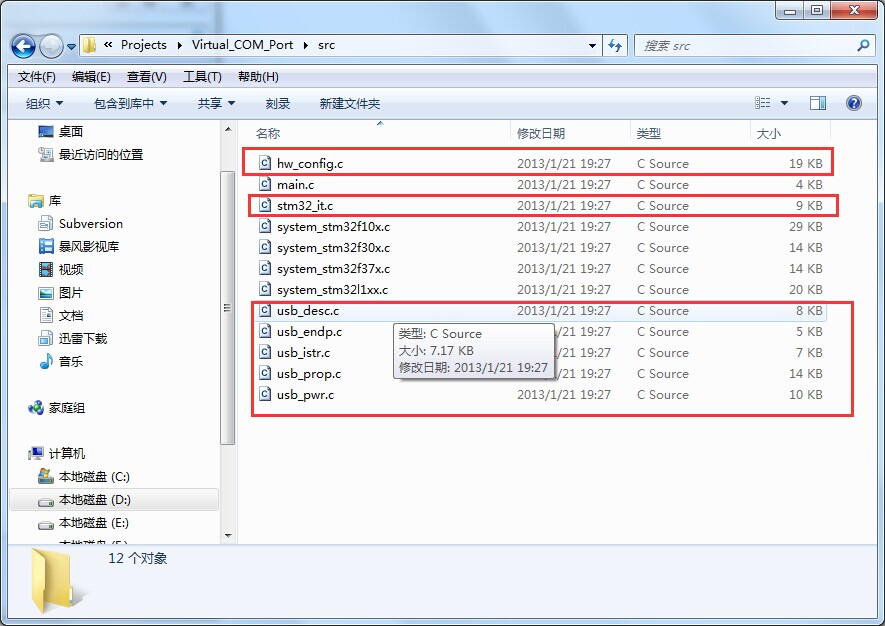
我为了方便演示统放在usb/src文件夹下: 图3 
现在复制USB的库文件,这些文件不需要我们修改: 图4 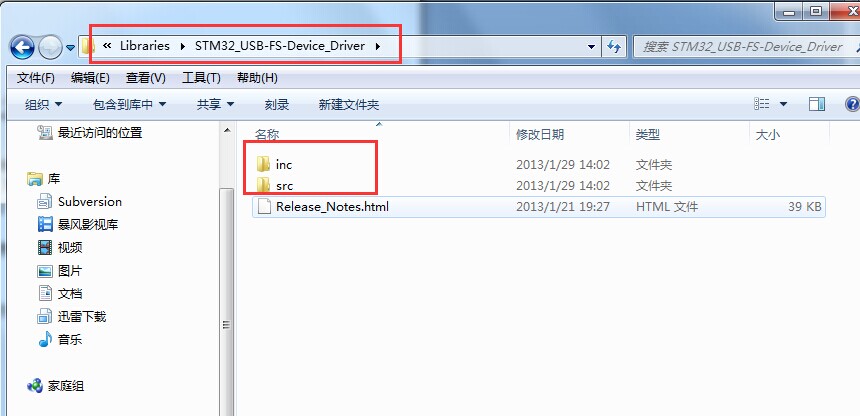
上图中的文件统一放在usb/lib文件夹下: 图5 
好了现在所需要的文件我们以复制完了。这里先讲一下DEMO程序的主要工作流程: 图6 
由上图可知,PC通过虚拟串口发送数据到STM32 usb口,STM32再通过usart1发送数据到PC串口。我们做项目时,只用USB虚拟串口即可。所以我们现在需要把串口发送部分删除。把USB做为一个COM口来使用。我们要如何使用这个USB口呢?demo中是把USB发送数据做了一个缓存,先把要发送的数据存入缓存中,然后由USB自动发送出去。而接收部分是直接通过串口透传。我们在应用时就需要用到两个FIFO,1是发送,这个和demo方式是样;2是接收,接收也做一个缓存,我们通过查询来判断是否收到新数据。这下大家应该明白为什么使用两个FIFO了。 我这里有写好的FIFO库函数可直接使用Queue.c文件。 现在开始修改: 1,stm32_it.c 更名为usb_it.c删除无用代码,只保留usb中断函数,和唤醒函数。代码如下: 代码1 - 1 /* Includes ------------------------------------------------------------------*/
- 2 #include "hw_config.h"
- 3 #include "usb_lib.h"
- 4 #include "usb_istr.h"
- 5
- 6
- 7 /*******************************************************************************
- 8 * Function Name : USB_IRQHandler
- 9 * Description : This function handles USB Low Priority interrupts
- 10 * requests.
- 11 * Input : None
- 12 * Output : None
- 13 * Return : None
- 14 *******************************************************************************/
- 15 #if defined(STM32L1XX_MD) || defined(STM32L1XX_HD)|| defined(STM32L1XX_MD_PLUS)|| defined (STM32F37X)
- 16 void USB_LP_IRQHandler(void)
- 17 #else
- 18 void USB_LP_CAN1_RX0_IRQHandler(void)
- 19 #endif
- 20 {
- 21 USB_Istr();
- 22 }
- 23
- 24 /*******************************************************************************
- 25 * Function Name : USB_FS_WKUP_IRQHandler
- 26 * Description : This function handles USB WakeUp interrupt request.
- 27 * Input : None
- 28 * Output : None
- 29 * Return : None
- 30 *******************************************************************************/
- 31
- 32 #if defined(STM32L1XX_MD) || defined(STM32L1XX_HD)|| defined(STM32L1XX_MD_PLUS)
- 33 void USB_FS_WKUP_IRQHandler(void)
- 34 #else
- 35 void USBWakeUp_IRQHandler(void)
- 36 #endif
- 37 {
- 38 EXTI_ClearITPendingBit(EXTI_Line18);
- 39 }
2,修改代码hw_config.c删除无用代码,新建立2组,读FIFO和写FIFO的函数。后面会用到。 代码如下: 代码2 - <img src="https://images.cnblogs.com/OutliningIndicators/ContractedBlock.gif" border="0" alt=""> View Code
这里要讲一下为什么要屏蔽SystemInit(),因为demo只运行虚拟串口功能,在USB未插入的情况下,是进入低功耗状态,插入时从低功耗状态退出后会调用此函数。当然我们在项目中一般不会这样,系统是否运行和插USB接口没有联系。所以我在下文中把进入低功耗代码屏蔽了,自然也就不用唤醒代码了。 图7 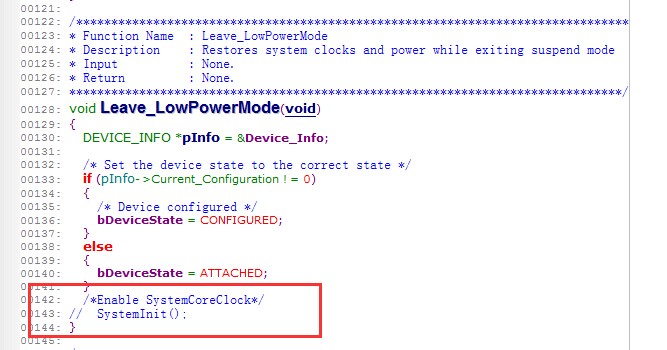
关于USB口使能控制引脚,需要根据开发板的引脚定义来修改宏定义platform_config.h文件中,笔者使用的是神舟3号开发板,控制信号刚好和demo相反,所以修改hw_config.c代码如下: 代码3 - 1 /*******************************************************************************
- 2 * Function Name : USB_Cable_Config
- 3 * Description : Software Connection/Disconnection of USB Cable
- 4 * Input : None.
- 5 * Return : Status
- 6 *******************************************************************************/
- 7 void USB_Cable_Config (FunctionalState NewState)
- 8 {
- 9 if (NewState == DISABLE)
- 10 {
- 11 GPIO_ResetBits(USB_DISCONNECT, USB_DISCONNECT_PIN);
- 12 }
- 13 else
- 14 {
- 15 GPIO_SetBits(USB_DISCONNECT, USB_DISCONNECT_PIN);
- 16 }
- 17 }
3,现在修改USB 回调函数中的代码usb_endp.c文件。使用下文代码替换: 代码4 - 1 /* Includes ------------------------------------------------------------------*/
- 2 #include "usb_lib.h"
- 3 #include "usb_desc.h"
- 4 #include "usb_mem.h"
- 5 #include "hw_config.h"
- 6 #include "usb_istr.h"
- 7 #include "usb_pwr.h"
- 8
- 9 /* Private typedef -----------------------------------------------------------*/
- 10 /* Private define ------------------------------------------------------------*/
- 11
- 12 /* Interval between sending IN packets in frame number (1 frame = 1ms) */
- 13 #define VCOMPORT_IN_FRAME_INTERVAL 5
- 14
- 15 /* Private macro -------------------------------------------------------------*/
- 16 /* Private variables ---------------------------------------------------------*/
- 17 static uint8_t txBuffter[VIRTUAL_COM_PORT_DATA_SIZE] = {0};
- 18 static volatile uint8_t txFlg = 0;
- 19 static volatile uint32_t FrameCount = 0;
- 20
- 21
- 22 /* Private function prototypes -----------------------------------------------*/
- 23 /* Private functions ---------------------------------------------------------*/
- 24
- 25 /*******************************************************************************
- 26 * Function Name : EP1_IN_Callback
- 27 * Description :
- 28 * Input : None.
- 29 * Output : None.
- 30 * Return : None.
- 31 *******************************************************************************/
- 32 void EP1_IN_Callback (void)
- 33 {
- 34 uint16_t len = 0;
- 35
- 36 if (1 == txFlg)
- 37 {
- 38 len = USB_TxRead(txBuffter, sizeof(txBuffter));
- 39
- 40 if (len > 0)
- 41 {
- 42 UserToPMABufferCopy(txBuffter, ENDP1_TXADDR, len);
- 43 SetEPTxCount(ENDP1, len);
- 44 SetEPTxValid(ENDP1);
- 45 FrameCount = 0;
- 46 }
- 47 else
- 48 {
- 49 txFlg = 0;
- 50 }
- 51 }
- 52 }
- 53
- 54 /*******************************************************************************
- 55 * Function Name : EP3_OUT_Callback
- 56 * Description :
- 57 * Input : None.
- 58 * Output : None.
- 59 * Return : None.
- 60 *******************************************************************************/
- 61 void EP3_OUT_Callback(void)
- 62 {
- 63 static uint8_t buffter[VIRTUAL_COM_PORT_DATA_SIZE] = {0};
- 64
- 65 uint16_t USB_Rx_Cnt;
- 66
- 67 /* Get the received data buffer and update the counter */
- 68 USB_Rx_Cnt = USB_SIL_Read(EP3_OUT, buffter);
- 69
- 70 /* USB data will be immediately processed, this allow next USB traffic being
- 71 NAKed till the end of the USART Xfer */
- 72 USB_RxWrite(buffter, USB_Rx_Cnt);
- 73
- 74 /* Enable the receive of data on EP3 */
- 75 SetEPRxValid(ENDP3);
- 76
- 77 }
- 78
- 79
- 80 /*******************************************************************************
- 81 * Function Name : SOF_Callback / INTR_SOFINTR_Callback
- 82 * Description :
- 83 * Input : None.
- 84 * Output : None.
- 85 * Return : None.
- 86 *******************************************************************************/
- 87 void SOF_Callback(void)
- 88 {
- 89 uint16_t len = 0;
- 90
- 91 if(bDeviceState == CONFIGURED)
- 92 {
- 93 if (0 == txFlg)
- 94 {
- 95 if (FrameCount++ == VCOMPORT_IN_FRAME_INTERVAL)
- 96 {
- 97 /* Reset the frame counter */
- 98 FrameCount = 0;
- 99
- 100 /* Check the data to be sent through IN pipe */
- 101 len = USB_TxRead(txBuffter, sizeof(txBuffter));
- 102
- 103 if (len > 0)
- 104 {
- 105 UserToPMABufferCopy(txBuffter, ENDP1_TXADDR, len);
- 106 SetEPTxCount(ENDP1, len);
- 107 SetEPTxValid(ENDP1);
- 108
- 109 txFlg = 1;
- 110 }
- 111 }
- 112 }
- 113 }
- 114 }
- 115 /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
这里讲下大概意思,函数EP3_OUT_Callback是在USB口收到数据后,将数据存入FIFO中。 函数SOF_Callback定时查询用户是否有要发送的数据,如果有则进行发送,在发送完成后会触发发送中断EP1_IN_Callback函数,如果发送完毕就不调用SetEPTxValid(ENDP1)函数,发送完成后就不会再触发EP1_IN_Callback函数。 4,修改usb_pwr.c在前文中说到:不让系统进入休眠状态,这里屏蔽185行 __WFI(); 5,修改usb_prop.c屏蔽COM初始化代码。137行USART_Config_Default(); 237行USART_Config(); 6,修改usb_desc.c 这里修改需要参考一些USB专业的书籍,推荐全圈圈的书,讲的通俗易懂。关于本程序的驱动,笔者在win7下测试可以自动安装,如果无法自动安装可使用文章开始的链接中的驱动程序。本文件如果修改需谨慎,其中pid,vid是制造商ID和产品编号,如果修改了那驱动也要对应修改,官方驱动就无法自动进行安装了。 到这里移植就差不多完成了,下面进行测试。由于USB虚拟串口不受波特率限制,所以笔者进行过50k/s的压力测试,运行半小时未丢1个字节。 移植好的工程STM32_UsbVirtualCom.rar也一起存放在上文章开始的链接中。
| .png) STMCU小助手
发布时间:2022-1-7 19:00
STMCU小助手
发布时间:2022-1-7 19:00







 微信公众号
微信公众号
 手机版
手机版










