|
一、什么是can总线? can总线因为使用电压差表示逻辑1和0,所以抗干扰性强,传播距离远(500kbps 时130M),比特率越小越远 1.can有几根线? 2根,can_H ,can_L 2.can怎么表示1,0? can_H - can_L > 0.9V ,为逻辑 0,也称为显性电平。 can_H - can_L < 0.5v ,为逻辑1,也称为隐性电平。 一般can_H为3.5V , 2.5V 一般can_L为2.5V ,1.5V 二、stm32 怎么使用can总线 1.can接口在哪?
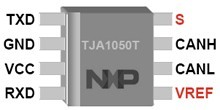
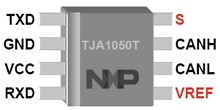
stm32有can总线控制器,以及有库函数stm32f10x_can.c可以驱动该控制器 但stm32只是有can总线控制器,要真正连接can总线,她还要外接can总线收发器,才能分出来can_H ,can_L,例如如下芯片: 这个芯片的主要作用是发送时根据TXD的电平来决定can_H 和can_L的电平,以及接收时根据can_H 和 can_L的电平差来决定RXD的电平。

2.can概念入门比较好的文档 https://wenku.baidu.com/view/7701528a6529647d2728520f.html 这个文档比较详细的介绍了can帧的类型,以及各个帧每个字节,每个bit的含义,以及优先级仲裁机制。下面的例程是数据帧。 3.can例程。
- #ifndef CAN_H_
- #define CAN_H_
- #include "stm32f10x.h"
- #define RCC_APBxPeriph_CAN_IO RCC_APB2Periph_GPIOA
- #define CAN_RXD GPIO_Pin_11
- #define CAN_TXD GPIO_Pin_12
- #define CAN_IO GPIOA
- enum canrate_e
- {
- CANRATE125K=125,
- CANRATE250K=250,
- CANRATE500K=500,
- CANNOTLINK,
- };
- enum canStdExt_e
- {
- CANSTD=0,
- CANEXT=1,
- };
- struct canrxtx_s
- {
- CanRxMsg rxMessage[3];
- u8 rx_newflag;
- uint32_t f;
- CanTxMsg txMessage;
- };
- /*std ID*/
- #define CAN1_TX_STD_ID 0x7DF //11 Bits ID,Functional
- #define CAN1_TX_STD_ID_ECM 0x7E0 //11 Bits ECM ID,physical
- #define CAN1_RX_STD_ID_ECM 0x7E8 //11 Bits ECM ID,physical
- #define CAN1_RX_STD_Filter 0x7FF //11 bits ECM Filter
- /*extend ID*/
- #define CAN1_TX_EXT_ID 0x18DB33F1 //29 Bits ID,Functional
- #define CAN_Id_Extended_HONDA 0x18DBEFF1 //29 Bits ID,Functional HONDA
- #endif
- #include "can.h"
- #include <string.h>
- u8 std_or_ext;
- struct canrxtx_s canrxtx;
- void CAN1_init(enum canrate_e canrate)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- CAN_InitTypeDef CAN_InitStructure;
- RCC_APB2PeriphClockCmd(RCC_APBxPeriph_CAN_IO | RCC_APB2Periph_AFIO,ENABLE);
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1,ENABLE);
- GPIO_InitStructure.GPIO_Pin = CAN_RXD;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(CAN_IO, &GPIO_InitStructure);
- GPIO_InitStructure.GPIO_Pin = CAN_TXD;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(CAN_IO, &GPIO_InitStructure);
- CAN_DeInit(CAN1);
- CAN_StructInit(&CAN_InitStructure);
- CAN_InitStructure.CAN_TTCM = DISABLE;
- CAN_InitStructure.CAN_ABOM = DISABLE;
- CAN_InitStructure.CAN_AWUM = DISABLE;
- CAN_InitStructure.CAN_NART = DISABLE;
- CAN_InitStructure.CAN_RFLM = DISABLE;
- CAN_InitStructure.CAN_TXFP = DISABLE;
- CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;
- CAN_InitStructure.CAN_SJW = CAN_SJW_1tq;
- CAN_InitStructure.CAN_BS1 = CAN_BS1_3tq;
- CAN_InitStructure.CAN_BS2 = CAN_BS2_2tq;
- //CAN BaudRate = 72MHz/(CAN_SJW+CAN_BS1+CAN_BS2)/CAN_Prescaler
- if(canrate==CANRATE125K) /* 125KBps */
- CAN_InitStructure.CAN_Prescaler =96;
- else if(canrate==CANRATE250K) /* 250KBps */
- CAN_InitStructure.CAN_Prescaler =48;
- else /* 500KBps */
- CAN_InitStructure.CAN_Prescaler = 24;
- CAN_Init(CAN1, &CAN_InitStructure);
- }
- void CAN1_ConfigFilter(u32 id1, u32 id2, u32 mask1, u32 mask2, u8 std_or_ext)
- {
- CAN_FilterInitTypeDef CAN_FilterInitStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- CAN_FilterInitStructure.CAN_FilterNumber=1; //use which filter,0~13
- CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;
- if(std_or_ext == CANSTD)
- {
- CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_16bit;
- CAN_FilterInitStructure.CAN_FilterIdHigh=id1<<5;
- CAN_FilterInitStructure.CAN_FilterIdLow=id2<<5;
- CAN_FilterInitStructure.CAN_FilterMaskIdHigh=mask1<<5;
- CAN_FilterInitStructure.CAN_FilterMaskIdLow=mask2<<5;
- }
- else
- {
- CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit;
- CAN_FilterInitStructure.CAN_FilterIdHigh=(u16) (id1>>13);
- CAN_FilterInitStructure.CAN_FilterIdLow=(u16) (((id1&0x00001FFF)<<3)|CAN_Id_Extended|CAN_RTR_DATA);
- CAN_FilterInitStructure.CAN_FilterMaskIdHigh=(u16) (mask1>>13);
- CAN_FilterInitStructure.CAN_FilterMaskIdLow=(u16) ((mask1&0x00001FFF)<<3);
- }
- CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_FIFO0;
- CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;
- CAN_FilterInit(&CAN_FilterInitStructure);
- NVIC_InitStructure.NVIC_IRQChannel = CAN1_RX1_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_Init(&NVIC_InitStructure);
- CAN_ITConfig(CAN1, CAN_IT_FMP0, ENABLE);
- }
- /************************init******************************/
- void init_demo()
- {
- std_or_ext = CANEXT;
- CAN1_init(CANRATE500K);
- CAN1_ConfigFilter(0x18DAF110,0x18DAF110,0x1FFFF100,0x1FFFF100,std_or_ext);//extend ID
- }
- /************************tx******************************/
- /*datalen<=8*/
- int CAN1_TransASerialData(u8* pdata,u8 datalen)
- {
- u8 i=0;
- Delay_ms(20);
- if(std_or_ext == CANEXT)
- {
- canrxtx.txMessage.StdId=0x00;
- canrxtx.txMessage.ExtId=CAN_Id_Extended_HONDA;//bentian
- canrxtx.txMessage.RTR=CAN_RTR_DATA;
- canrxtx.txMessage.IDE=CAN_Id_Extended;// 29 bits
- }
- if(std_or_ext== CANSTD)
- {
- canrxtx.txMessage.StdId=CAN1_TX_STD_ID;
- canrxtx.txMessage.ExtId=0x00;
- canrxtx.txMessage.RTR=CAN_RTR_DATA;
- canrxtx.txMessage.IDE=CAN_Id_Standard;//11 bits
- }
- canrxtx.txMessage.DLC=0x08;
- canrxtx.txMessage.Data[0]=datalen;
- memcpy(&(canrxtx.txMessage.Data[1]),pdata,datalen);
- while(((i++)<3)&&(CAN_TxStatus_NoMailBox==CAN_Transmit( CAN1,&canrxtx.txMessage)))
- if(i>=3) //timeout
- {
- return (-1);
- }
- canrxtx.rx_newflag=0;
- return (0);
- }
- /************************rx******************************/
- void CAN1_RX1_IRQHandler(void)
- {
- memset(&canrxtx.rxMessage,0,sizeof(CanRxMsg));
- if(CAN_MessagePending(CAN1,CAN_FIFO0))
- {
- CAN_Receive(CAN1,CAN_FIFO0,&canrxtx.rxMessage[0]);
- }
- canrxtx.rx_newflag=1;
- }
三、标识符过滤器的解释 过滤器只是用于接收,判断某个报文是否能通过过滤器,过滤器初始化如下: - CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;
- <font face="Tahoma" color="#000000">CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_16bit; </font><div><font face="Tahoma" color="#000000">CAN_FilterInitStructure.CAN_FilterIdHigh=id1<<5; CAN_FilterInitStructure.CAN_FilterIdLow=id2<<5; CAN_FilterInitStructure.CAN_FilterMaskIdHigh=mask1<<5; CAN_FilterInitStructure.CAN_FilterMaskIdLow=mask2<<5; </font></div>
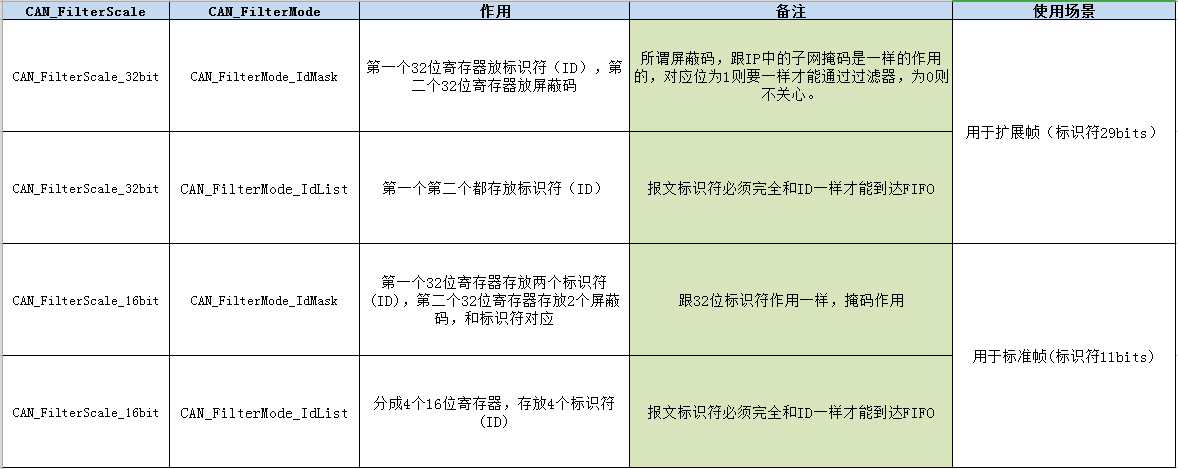
stm32有0~13个过滤器组,每个过滤器组有两个32位的寄存器,通过设置下面两个结构体成员的值可以有四种组合:CAN_FilterMode 和 CAN_FilterScale

四、关于邮箱 如下图,发送3个邮箱,接收每个FIFO 3个邮箱,这是硬件自动管理的,软件不用管,只要判断发送成不成功,中断接收哪个FIFO就行了(要接收过滤器初始化时绑定的那个FIFO)。 每个邮箱都可以存储一个独立的报文,发送调度器(下图红圈)会根据标识符(ID)的优先级来决定先发送哪个报文(比如发送时3个邮箱都有报文,标识符不一样),PS:标识符数值越小,优先级越高,这是由CAN总线仲裁机制决定的(线与,0可以与掉1)。
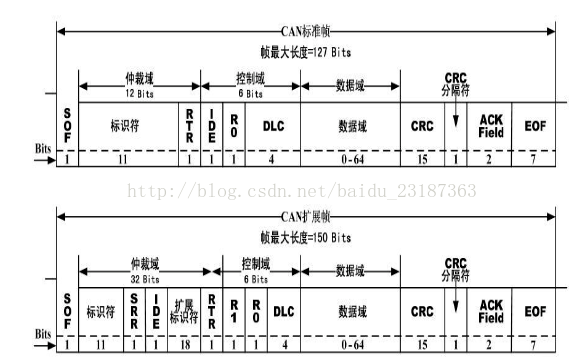
五、can中容易理解错的概念 1.CAN总线中是没有地址这个概念的,每个报文都是群发。 所有节点都可以发送和接收,先发送的有优先权,此时其它节点处于监听模式,看是否有能通过自己过滤器的报文。 当同时有多个节点需要同时发送时,can总线将实行仲裁,标识符小的优先发送,被仲裁下去想要发送的节点立即转入监听状态,等待下次机会。 标识符是报文的一部分,如下图所示: 2.不管是标准帧或者扩展帧,最多只能携带8字节数据,用户可以根据这8个字节私立协议。 SOF:帧起始信号,显性电平,即can_H和can_L相差很小,小于0.5V,库函数做了赋值,不管。 标识符:11bit或者29bits,代表着本条报文的优先级 RTR:帧类型,是远程帧还是数据帧 IDE:标准帧还是扩展帧 R0:保留位,库函数做了,不管 DLC:数据域长度 数据域:具体携带的数据,最长8字节 CRC:对CRC前所有字节进行校验,得到的结果,库函数进行了这一步,不需要我们自己计算,不管。 CRC分隔符:1个隐性电平,库函数做了,不管 ACK Field:库函数做了, EOF:帧结束标志,至少连续7位的隐性电平。不管。
3.位填充的概念 在CAN消息帧中,帧起始,仲裁场。控制场,数据场和CRC段,均以位填充方法进行编码。当发送器在发送流中检测到5个极性相同的连续位时,自动插入一个部补位码。 我觉得这个只要了解就行了,实际编程中库函数已经帮我们做了。
| .png) STMCU小助手
发布时间:2022-1-17 20:39
STMCU小助手
发布时间:2022-1-17 20:39





 微信公众号
微信公众号
 手机版
手机版