.png) STMCU小助手
发布时间:2022-1-28 20:52
STMCU小助手
发布时间:2022-1-28 20:52
|
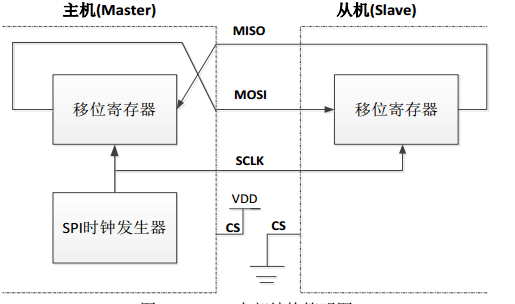
SPI是一种高速的,全双工同步的通信总线,在芯片管脚上占用了四根线,节约了芯片的管脚,同时为PCB的布局节省了空间,提供了方便,因此越来越多的芯片集成了这种通信协议,STM32也就有了SPI接口。 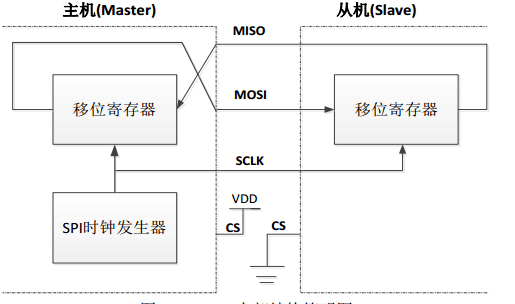 
有上图可知有四个通信口,两个位移寄存器是同步的,那MISO和MOSI就不难理解了。 SCLK时钟信号,由主设备产生。CS从设备片选信号,由主设备控制。 1、配置相关引脚的复用功能,使能SPI2时钟。 假设我们要使用SPI2,第一步SPI2时钟使能,第二步相关引脚的输出模式(MISO,MOSI,SCLK,(CS没有接外设的话,我们使用软件管理方式))。
2、初始化SPI2,设置SPI2工作模式
3、使能SPI2 初始化完成之后我们就要使能SPI2通信了。 SPI_Cmd(SPI2,ENABLE);//使能SPI外设 4.SPI传输数据 传输数据时,就需要有发送数据和接收数据的函数 发送数据函数为:void SPI_I2S_SendData(SPI_TypeDef* SPIx, uint16_t Data); 接收数据函数为:uint16_t SPI_I2S_ReceiveData(SPI_TypeDef* SPIx) ; 5、查看SPI传输状态 判断数据是否传输完成 SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE); |
【福利三:逢7发帖赢大礼】4、基于STM32G070板子SPI flash 移植SFUD库
【福利三:逢7发帖赢大礼】基于STM32G070板子的uart shell移植设计
【福利三:逢7发帖赢大礼】3、基于STM32G070板子的YModem串口协议通信
【福利三:逢7发帖赢大礼】2、基于STM32G070板子的OLED移植U8G2库
实战经验 | ClassB功能安全认证代码与应用代码分区的实现要点
STM32G0 系列 I2C 通信异常典型案例分析与解决方案总结
经验分享 | LAT1490 两个STM32G0 I2C 通信异常的案例分析
经验分享 | STM32G0 I2C bootloader Go 命令后调试连接失败:DBG_SWEN 位复位修复
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
 微信公众号
微信公众号
 手机版
手机版