.png) STMCU小助手
发布时间:2022-2-1 18:00
STMCU小助手
发布时间:2022-2-1 18:00
|
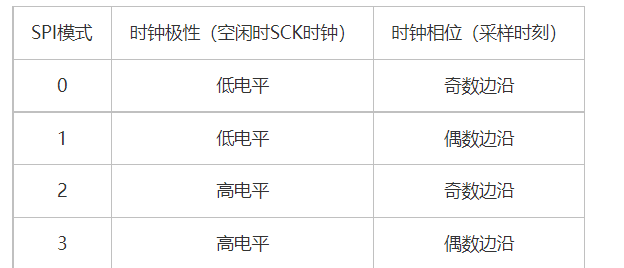
本文介绍如何使用STM32标准外设库的GPIO端口模拟SPI,本例程使用PA5、PA6和PA7模拟一路SPI。SPI有4种工作模式,模拟SPI使用模式0,即空闲时SCK为低电平,在奇数边沿采样。 本文适合对单片机及C语言有一定基础的开发人员阅读,MCU使用STM32F103VE系列。 1. 简介 SPI 协议是由摩托罗拉公司提出的通讯协议(Serial Peripheral Interface),即串行外围设备接口,是一种高速全双工的通信总线。它被广泛地使用在要求通讯速率较高的场合。SPI用于多设备之间通讯,分为主机Master和从机Slave,主机只有一个,从机可以有多个,通过片选信号对从机进行选择,一次只能选择一个从机。通讯只能由主机发起,支持的操作分为读取和写入,即主机读取从机的数据,以及向从机写入数据。 SPI一般有4根线,分别是片选线SS、时钟线SCK、主设备输出\从设备输入MOSI、主设备输入\从设备输出MISO,其中除MISO对于主机为输入引脚外,其他引脚对于主机均为输出引脚。因为有独立的输入和输出引脚,因此SPI支持全双工工作模式,即可以同时接收和发送。 2. 总线传输信号
3. 时序说明 以模式0举例说明:
初始化跟普通GPIO类似,SCK和MOSI设置为推挽输出,而MISO设置为浮空输入。 GPIO初始化完成之后,SCK置为低电平,进入空闲状态。 5. 模拟信号由于SPI支持一个周期内同时读取和写入,因此读取和写入操作可以用一个函数实现,而单独的读取函数和写入函数可以通过调用该读写函数实现。 完整代码(仅自己编写的部分)
|
【福利三:逢7发帖赢大礼】4、基于STM32G070板子SPI flash 移植SFUD库
【福利三:逢7发帖赢大礼】基于STM32G070板子的uart shell移植设计
【福利三:逢7发帖赢大礼】3、基于STM32G070板子的YModem串口协议通信
【福利三:逢7发帖赢大礼】2、基于STM32G070板子的OLED移植U8G2库
实战经验 | ClassB功能安全认证代码与应用代码分区的实现要点
STM32G0 系列 I2C 通信异常典型案例分析与解决方案总结
经验分享 | LAT1490 两个STM32G0 I2C 通信异常的案例分析
经验分享 | STM32G0 I2C bootloader Go 命令后调试连接失败:DBG_SWEN 位复位修复
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
经验分享 | STM32G0B1 待机模式意外唤醒深度解析:RTC 结构体未初始化的隐形坑
 微信公众号
微信公众号
 手机版
手机版