.png) STMCU小助手
发布时间:2022-5-25 19:00
STMCU小助手
发布时间:2022-5-25 19:00
|
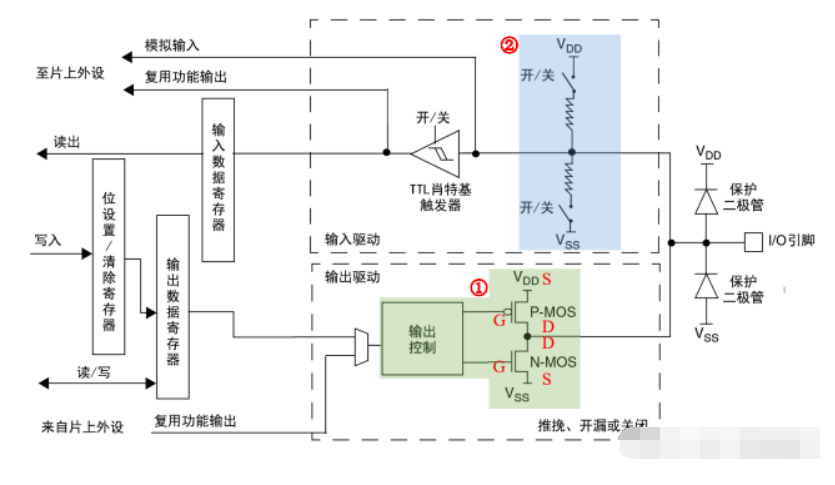
1. 什么是GPIO: GPIO(General-Purpose IO ports,通用输入/输出接口),用于感知外界信号(输入模式)和控制外部设备(输出模式)。 STM32F103C8T6一共有48个引脚,除去电源引脚、晶振时钟引脚、复位引脚、启动选择引脚、程序下载引脚(大部分为最小系统必须引脚),剩下的则是GPIO引脚。 下图为STM32F103系列GPIO的基本结构,左侧连接MCU内部,中间上半部分为输入,中间下半部分为输出,右侧为MCU引出的外设I/O引脚。 YA3FE%7L4T6Z9YE_9.png")
2. GPIO工作模式 STM32F103系列的I/O引脚共有8种工作模式,其中输出模式有四种:推挽输出、开漏输出、复用推挽输出、复用开漏输出;输入模式有四种:上拉输入、下拉输入、浮空输入、模拟输入。 ![1FIUO9A1RM`VI]1IY(Z4$(4.png](data/attachment/forum/202205/24/192941x0wssrawsdr0idxb.png "1FIUO9A1RM`VI]1IY(Z4$(4.png")
1. 推挽输出(Push-Pull,PP) 推挽结构由两个MOS管按互补对称的方式连接,任意时刻总是其中一个三极管导通,另一个三极管截止。 如上图①所示,MOS管作为开关使用,“输出控制”向两个MOS管栅极加一定电压,P-MOS管源极和漏极之间导通,VDD经过P-MOS管的S->G->D输出,N-MOS管处于高阻态(电阻很大,近似开路),整体对外为高电平;“输出控制”取消向两个MOS管栅极施加电压,P-MOS管源极和栅极截止,P-MOS管处于高阻态,N-MOS管源极和漏极导通,整体对外为低电平。 推挽模式,让“输出控制”变为了VDD/Vss输出,使得输出电流增大,提高了输出引脚的驱动能力,提高了电路的负载能力和开关的动作速度。 2. 开漏输出(Open-Drain,OD) 开漏模式下,“输出控制”不会控制P-MOS管,“输出控制”只会向N-MOS管栅极加一定电压,两个MOS管都处于截止状态,两个漏极处于悬空状态,称之为漏极开路。“输出控制”取消栅极的施加电压,P-MOS管依旧处于高阻态,N-MOS管导通,整体对外为低电平。 开漏输出模式可以等效将下图中灰色框的P-MOS管看作不存在。即该模式下只能输出低电平,若要输出高电平,则需要外接电阻,所接的电阻称为上拉电阻,此时输出电平取决于此时上拉电阻的外部电源电压情况,如下图中蓝色框的外部电路。 
推挽输出模式可以直接输出高电平,开漏输出模式需要外接上拉电阻才能输出高电平,但开漏输出拥有一些推挽输出不具有的特性: 1.利用外部电路驱动能力。如图 8.1.2 所示,“输出控制”只需要提供一个很小的栅极驱动电流,VCC 经过上拉电阻为外部负载提高驱动电流;2.实电平转换。推挽输出模式由VDD提供,即只能提供3.3V电平。使用开漏输出模式后,VCC可以为 5V,从而实现了电平转换的效果。 3.方便实现“逻辑与”功能。多个开漏的引脚可以直接并在一起使用,统一接一个合适的上拉电阻,就可以实现“逻辑与”关系,即当所有引脚均输出高电平时,输出才为高电平,若任一引脚输出低电平,则输 出低电平。在I²C、SMBUS等总线电路中经常会用到。 3. 复用功能推挽/开漏输出(Alternate Function,AF) GPIO引脚除了作为通用输入/输出引脚使用外,还可以作为片上外设(USART、I²C、SPI等)专用引脚,即一个引脚可以有多种用途,但同一时刻一个引脚只能使用复用功能中的一个。 当引脚设置为复用功能时,可选择复用推挽输出模式或复用开漏输出模式,在设置为复用开漏输出模式时,需要外接上拉电阻。 4. 上拉输入模式(Input Pull-up) 如上图中②所示,VDD经过开关、上拉电阻,连接外部I/O引脚。当开关闭合,外部I/O无输入信号时,默认输入高电平。该模式的典型应用就是外接按键,当没有按键按下时候,MCU的引脚为确定的高电平,当按键按下时候,引脚电平被拉为低电平。 5. 下拉输入模式(Input Pull-down) 如上图 中②所示,Vss经过开关、下拉电阻,连接外部I/O引脚。当开关闭合,外部I/O无输入信号时,默认输入低电平。 6. 浮空输入模式(Floating Input) 如上图中②所示,两个上/下拉电阻开关均断开,既无上拉也无下拉,I/O引脚直接连接TTL肖特基触发器,此时I/O引脚浮空,读取的电平是不确定的,外部信号是什么电平,MCU引脚就输入什么电平。MCU复位上电后,默认为浮空输入模式。 7. 模拟输入模式(Analog mode) 如上图中②所示,两个上/下拉电阻开关均断开,同时TTL肖特基触发器开关也断开,引脚信号直接连接模拟输入,实现对外部信号的采集。 GPIO 输出速度 1.STM32的I/O引脚工作在输出模式下时,需要配置I/O引脚的输出速度。该输出速度不是输出信号的速度,而是I/O口驱动电路的响应速度。 2.STM32提供三个输出速度:2MHz、10MHz、50MHz。实际开发中需要结合实际情况选择合适的相应速度,以兼顾信号的稳定性和低功耗。通常,当设置为高速时,功耗高、噪声大、电磁干扰强;当设备为低速 时,功耗低、噪声小、电磁干扰弱。 3.通常简单外设,比如LED灯、蜂鸣器灯,建议使用2MHz的输出速度,而复用为I²C、SPI等通信信号引脚时,建议使用10MHz或50MHz以提高响应速度。 3. 硬件方面 
常见LED灯(图片来源百问网) 
LED灯原理图(图片来源百问网) 4. 软件方面 driver_led.h
driver_led.c
main.c
|
 微信公众号
微信公众号
 手机版
手机版