.png) STMCU小助手
发布时间:2022-8-23 16:13
STMCU小助手
发布时间:2022-8-23 16:13
|
前言 用STM32CubeMx生成初始化配置代码是十分方便的,但是在处理多个项目的时候,就会发现,自动生成的中断函数调用的都是同一个回调函数,在这个回调函数中又要根据不同的句柄来处理,不同的项目外设又有所区别,还是要花点时间来进行移植。 比如说,我在项目A中使用到了串口1、串口2、串口3,但是在项目B中,我只使用到了串口2,并且在项目B中,串口2的功能是项目A的串口1的功能,在这种情况下,我就需要再定义一次 HAL_UART_RxCpltCallback() ,然后移植对应的功能。当然也可以重新 define 一个宏,来对应所使用的串口,这样移植上也会快许多。但是假如,后面新来了一个需求,需要实现项目C的串口3的功能,原本只要添加对应的头文件,模块处理这些外设是最简便的,但是这时候会发现,项目C中也定义了HAL_UART_RxCpltCallback(),这就需要人工去移植这部分的代码了。 而我就在想,项目C的串口3是已经实现的模块,且这个模块是单独的.c文件和.h文件,并且不和其他的串口耦合在一起,这样的轮子造起车子来就快了许多了。但是找遍全网,会发现,关于HAL库中串口中断的教程都是基本的实现,没有更深层次的解释了,在学习MEMS库的过程中,看到官方的代码,在使用按钮触发外部中断的时候,竟然可以自定义外部中断的回调函数,进行一番学习之后,终于掌握了自定义中断回调的方法,不仅限于串口中断函数的回调,其他的外设都是相类似的,都是可以自定义中断的回调函数。 高手可以直接跳过第一节的内容,直接跳到第二节看如何进行操作。 一、HAL库的中断实现 中断的原理网上到处都有,也可以参考正点原子这种开源的教程。 我们正常在STM32CubeMX配置好中断后,通过 GENERATE CODE 生成代码,在 stm32f7xx_it.c 中,就会自动生成中断的处理函数,比如 USART2_IRQHandler,可以看到串口2的全局中断仅仅调用了 HAL_UART_IRQHandler 函数,该函数用于处理UART中断请求。
我们进入 HAL_UART_IRQHandler 看看里面具体的实现。这个实现虽然很长,但是逻辑比较简单。首先判断是否有错误产生,没有错误就会调用 UART_Receive_IT,用于在非阻塞模式下接收大量数据。如果在接收的过程中有错误发生,那么就会进行标志位的处理,再下面一点就可以看到 USE_HAL_UART_REGISTER_CALLBACKS 这个宏定义,这就是我们自定义中断函数的关键了。如果我们定义了 USE_HAL_UART_REGISTER_CALLBACKS,那么我们通过注册自定义的中断函数后,在这里 huart->ErrorCallback(huart) 就可以直接跳转到我们的自定义的接收异常函数了,而不是 HAL_UART_ErrorCallback(huart) 这个HAL通用的接收异常处理函数。 注:F7的板子在公司,写这个教程的时候手头只有 NUCLEO-L152RE 的开发板,使用的库是 STM32Cube_FW_L1_V1.10.2。 STM32CubeMx生成的代码有所区别,但原理上是一样的。F767ZI 是通过 huart->RxISR(huart) 这个方式来调用中断处理函数的,最终调用的是 UART_RxISR_8BIT 这样子的函数。当然后面推出了新的固件版本,也可能导致具体的实现有所区别。
然后我们看看没有接收错误发生时,调用的函数 UART_Receive_IT(huart)。这个首先根据数据位的长度来进行接收数据,(9bit和少于9bit的处理是不一样的),串口数据就保存在 huart->pRxBuffPtr,每接收一个数据,那么 huart->RxXferCount 就减一,直至为0,这时候就会触发接收完成的中断了。至于需要接收几个字节来触发中断,就取决于初始化时候的设置了。 huart->pRxBuffPtr变为0后,会先关闭中断,如果使能了USE_HAL_UART_REGISTER_CALLBACKS ,就会调用 huart->RxCpltCallback(huart),我们就可以通过注册中断处理函数来跳转到我们自定义的函数,而不是HAL库本身的接收完成中断函数HAL_UART_RxCpltCallback(huart)。而如果我们使能了USE_HAL_UART_REGISTER_CALLBACKS,却没有去注册自定义函数,最终调用的还是HAL库本身的中断处理函数,这是因为在 HAL_UART_Init 初始化中会调用函数 UART_InitCallbacksToDefault,这个函数会将所有的回调函数初始化为其默认值。 注:接收完成后,这个会自动将关闭中断,接收完指定的字节之后,还需要继续接收的话就需要再次打开中断了。
二、使用方法 原理性的代码解析已经在前面一章节解析了,这一章节就是讲要如何实现,其他的都不难,重点是要知道 USE_HAL_UART_REGISTER_CALLBACKS 这个宏,其他的不懂的地方就可以根据这个线索来一步一步的追踪了。 
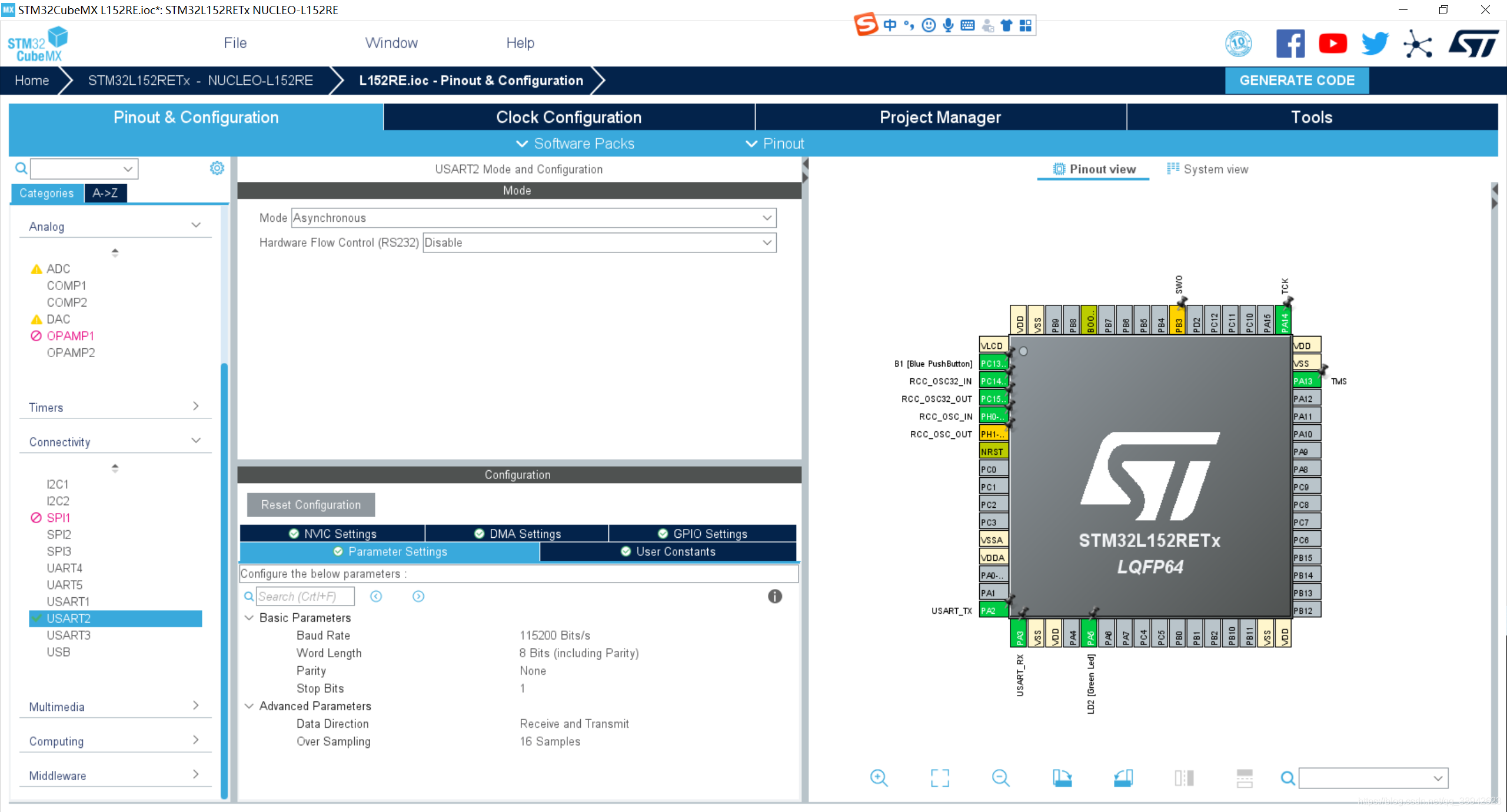
图2.1 设置串口参数 
图2.2 使能串口中断并设置优先级 前两步都是设置串口中断的设置,按照常规来设置就可以了,重点了如何使能 USE_HAL_UART_REGISTER_CALLBACKS 这个宏,这个宏在 Project Manager 中的 Advanced Settings 右边的 Register Callback 中,选择 UART 为 ENABLE ,注意不是 USART,别选错了。 当然也可以在生成的项目中搜索 USE_HAL_UART_REGISTER_CALLBACKS 手工改成1,但是假如后续又通过STM32CubeMX修改配置的话,再生成代码,会将这里的配置覆盖过去,如果没注意这个点的就很容易出错,建议还是在这里修改比较稳妥一些。 
代码生成之后,默认是没有打开串口中断的,通过 HAL_UART_RegisterCallback() 自定义回调函数,再开启中断就完成了我们的目的。 我们可以专门在一个.c文件来自定义接收完成的回调函数并打开中断,在main函数中调用这个初始化函数就可以了。这样就能和其他串口解耦,移植起来就很方便了。比如我需要指定一个串口来使用 Letter Shell( github上的开源项目,我的文章中也有这个教程),那么我就写一个 shell_port.c 文件,仅仅需要通过宏来指定使用shell 的串口句柄,其他的都不需要修改,直接添加这个 c文件,在main函数中使用 userShellInit() 来初始化,就能直接使用这个扩展模块了,相比于其他的方式,这个移植过程可以说是相当简便省事了(其他的形式需要在 usart.c 中定义串口接收的数组,再定义接收的个数,再在中断中移植自己的功能,再在main函数中打开串口中断,每建立一个新的项目都需要这么做,尤其时间长了之后,要配置串口中断的函数的时候就容易忘记函数名称,真的很烦)。 HAL_UART_RegisterCallback() 这个函数的第一个参数是 huart ,要配置的串口句柄。 这个函数的第二个参数是 CallbackID ,不同的外设所支持的回调函数ID不同,对于串口来说,HAL_UART_CallbackIDTypeDef 列出了所支持的各个功能ID,我们要在串口接收完成后调用我们自定义的ID,使用的就是 HAL_UART_RX_COMPLETE_CB_ID 。 这个函数的第三个参数是 pCallback ,我们自定义的回调函数,但是这个函数有要求,参照 pUART_CallbackTypeDef 的定义。返回应该是void,并且需要一个参数 UART_HandleTypeDef *huart。 typedef void (*pUART_CallbackTypeDef)(UART_HandleTypeDef *huart); // pointer to an UART callback function 注:这里设置的是每接收一个字节就触发中断,但是HAL库本身处理串口中断标志位后,会关闭中断,所以我们就需要 HAL_UART_Receive_IT 再次开启中断。
———————————————— 转载:fafuwxm |
基于stm32平台上的IC-MU磁绝对值编码器SPI通讯和码盘数据处理
【逢7发帖赢大礼】STM32开发之WIFI实时时钟
使用STM32 MCU和MPU连接PDM数字麦克风
【逢7发帖赢大礼】STM32开发之指纹识别!
【逢7发帖赢大礼】STM32开发之环境空气质量监测
【逢7发帖赢大礼】STM32开发之人体实时运动信息监测!
【STM32U3 评测】CAN报文接收及过滤
STM32 硬核调试技巧:用 DWT 硬件监控内存读写与函数调用
OpenBLT移植到STM32F103战舰开发板上适用于所有STM32F103系列的Bootloader
巧用 Linker 自定义变量,破解 STM32 Flash 全片自检 ROM 大小配置难题
 微信公众号
微信公众号
 手机版
手机版