stm32f103c8t6利用蓝牙控制180度舵机
关于蓝牙模块部分,如果不了解蓝牙模块的可以看我之前发的东西。
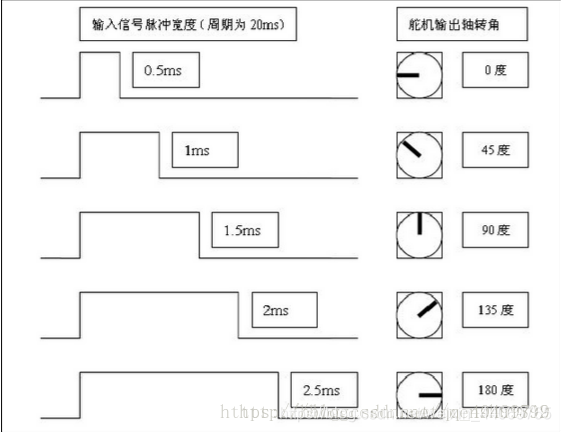
一般来说,舵机接收的PWM信号频率为50HZ,即周期为20ms。当高电平的脉宽在0.5ms-2.5ms之间时舵机就可以对应旋转到不同的角度。以180度角度舵机为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
关于舵机的话,本人用的是6~8.4V的的60KG大舵机,这里需要注意的是, 控制板上面只提供5V电压,满足不了这种舵机的电压,所以我利用12V的锂电池,让锂电池的正负极接在降压模块输入端的正负极,接着让降压模块输出端的正负极接舵机的正负极,也就是说舵机是独立供电的,最重要的一点就是舵机外接电源的GND需要和控制板的GND接在一起,也就是共地,这样舵机才能转动,否则是转动不了的,如果你用的是5V的舵机,虽然大多数情况直接接控制板的正负极可以让舵机转动,但是这样电压不稳定,会导致舵机转动一个角度后就卡死了,所以本人建议舵机最好都给他个独立的电源,这样舵机就能连续转动,不会产生卡死状态。以下是本人所用的降压模块和60K大舵机的图片及视频效果,这种大舵机速度比较慢,但是扭矩大。
以下的舵机VCC->降压模块的VCC
舵机的GND->降压模块的GND
舵机的信号线->stm32控制板的PB5(TIM3_CH2)
下面附上主程序:
- <font face="Tahoma"><font size="3"><font color="#000000">#include "led.h"</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">#include "delay.h"</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">#include "key.h"</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">#include "sys.h"</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">#include "usart.h"</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">#include "timer.h"</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">
- </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">extern u8 res; </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> int main(void)</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> { </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> int len;</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> int t;</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">int i; </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> delay_init(); //延时函数初始化 </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> uart_init(115200); //串口初始化为115200</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> My_USART2_Init();</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM1_PWM_Init(199,7199); //不分频。T为20ms,这样的配置就是为了让输出的PWM信号达到舵机要求的20ms周期。</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> while(1)</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> {</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> if(res=='1'){TIM_SetCompare2(TIM3,175);delay_ms(1000);}对应180度</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> if(res=='2'){TIM_SetCompare2(TIM3,180);delay_ms(1000);}对应135度</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> if(res=='3'){TIM_SetCompare2(TIM3,185);delay_ms(1000);}对应90度</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> if(res=='4'){TIM_SetCompare2(TIM3,190);delay_ms(1000);}对应45度</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> if(res=='5'){TIM_SetCompare2(TIM3,195);delay_ms(1000);}对应0度</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> //在周期20ms的PWM信号中,不同的脉宽对应舵机不同的转动角度,在0.5ms-2.5ms间有效 </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> // TIM_SetCompare2(TIM4,175);//总共计数200,前面设置的模式是计数在比较值之后才是高电平</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> //也就是高电平的时间是[(200-175)/200]*20ms=2.5ms,即转过360度,180度舵机依次类推 </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> } </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> }</font></font></font>
子程序:
- <font face="Tahoma"><font size="3"><font color="#000000">#include "timer.h"</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">#include "led.h"</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">#include "usart.h"</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">void TIM1_PWM_Init(u16 arr,u16 psc)</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">{ </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> GPIO_InitTypeDef GPIO_InitStructure;</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_OCInitTypeDef TIM_OCInitStructure;</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB| RCC_APB2Periph_AFIO , ENABLE); </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> //设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形 GPIOA.8</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH1</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> //初始化TIM1</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">// TIM_TimeBaseStructure.TIM_RepetitionCounter=0;//重复计数器的值</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> //初始化TIM1 Channel1 PWM模式 </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> //TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable;</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> //TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;//输出通道空闲电平极性设置</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">//TIM_OC4Init(TIM1, &TIM_OCInitStructure);</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">
- </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM1在CCR1上的预装载寄存器</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">// TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable); </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> TIM_Cmd(TIM3, ENABLE); //使能TIM1</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000"> //TIM_CtrlPWMOutputs(TIM1, ENABLE);//主输出使能,当使用的通用定时器时,这句不需要</font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">
- </font></font></font>
- <font face="Tahoma"><font size="3"><font color="#000000">}</font></font></font>
如果在定时器初始化时TIM_OCInitStructure.TIM_OCMode配置的是PWM1模式那么main中的占空比就依次为25、20、15、10、5。下面解释一下模式PWM1和模式PWM2的区别:
假定TIM_OCInitTypeDef.TIM_OCPolarity = TIM_OCPolarity_High
若TIM_OCInitTypeDef.TIM_OCMode = TIM_OCMode_PWM1时:
当计时器值小于比较器设定值时则TIMX输出脚此时输出有效高电位。
当计时器值大于或等于比较器设定值时则TIMX输出脚此时输出低电位。
若TIM_OCInitTypeDef.TIM_OCMode = TIM_OCMode_PWM2时:
当计时器值小于比较器设定值时则TIMX输出脚此时输出有效低电位。
当计时器值大于或等于比较器设定值时则TIMX输出脚此时输出高电位。
本人用的是PWM2模式,在你们自己试验时,可以将占空比设置成各种不同的值,看看有什么不同的效果。
————————————————
版权声明:i土豆
|
.png) STMCU小助手
发布时间:2022-10-16 18:04
STMCU小助手
发布时间:2022-10-16 18:04


 微信公众号
微信公众号
 手机版
手机版