一、开发板平台简介:
1、开发板资源简介
(1)开发板主芯片型号:STM32L431RCT6
(2)开发板主芯片封装:LQFP-64_10x10x05P
(3)开发板主芯片内核:ARM® Cortex®-M4
(4)开发板主芯片主频:80MHz
(5)开发板主芯片Flash大小:256KB
(6)开发板主芯片RAM大小:64KB
(7)其他外设:请参考芯片手册


2、串口简介
串口全称为串行通讯接口,即数据在通信线上一次传输一位,按先后一定顺序传输。我们通常所说的单片机串口准确来说应该是串行异步收发传输器(Universal Asynchronous Receiver/Transmitter,UART),使用TTL电平,串口需要RXD、TXD、GND三根线进行通信。
(1)我们选用的STM32L431RCT6开发板串口1已通过USB转TLL串口芯片CH340G引出,使用时,只需要用公对公USB线连接电脑即可(注意也得需要安装CH340G驱动),后期验证试验也试验该串口1进行。
(2)开发板上的其他串口已通过排针引出,为TTL电平,通信的时候需要注意选择对应的电平模块,如USB转TTL串口模块等。
二、新建工程
1、新建STM32CubeMX基础工程
(1)打开STM32CubeMX,点击“File”-->"New Project"

(2)等待打开主芯片选项界面(大约1分钟时间)。

(3)昨天搜索框中输入(或选择)所需的主芯片型号(因为我们用的是STM32L431RCT6开发板,所以此处现在STM32L431RC),然后在右下角选择STM32L431RCTx(因为开发板主芯片是STM32L431RCT6),左键双击即可打开新建的项目。

(4)选择时钟源。
——因为开发板上有8M外部时钟,此处选择外部高速时钟(HSE)。
——因为我们没有用到外部低速时钟(LSE),此处不做处理。

2、配置GPIO控制LED
备注:LED灯用来指示系统是否正常工作。
(1)查STM32L431RCT6开发板原理图得LED1控制引脚为PC0,则配置GPIO的引脚PC0。
鼠标左键点击PC0,选择“GPIO_Output”,表示设置该引脚为输出模式。

(2)根据自己的需求配置GPIO的参数,如输出方式、输出频率、上拉下拉等。因为GPIO控制LED的要求比较低,此处采用默认参数即可,不用修改。

3、设置串口1参数
(1)查原理图得知,串口0使用STM32L431RCT6引脚为PA9-USART1_TX,PA10-USART1_RX,引脚设置如下:

(2)序号1用来设置串口收发引脚的选择。
(3)序号2-3-4-5-6设置串口参数,如波特率115200、8位、NONE无奇偶校验等。
4、配置项目工程参数
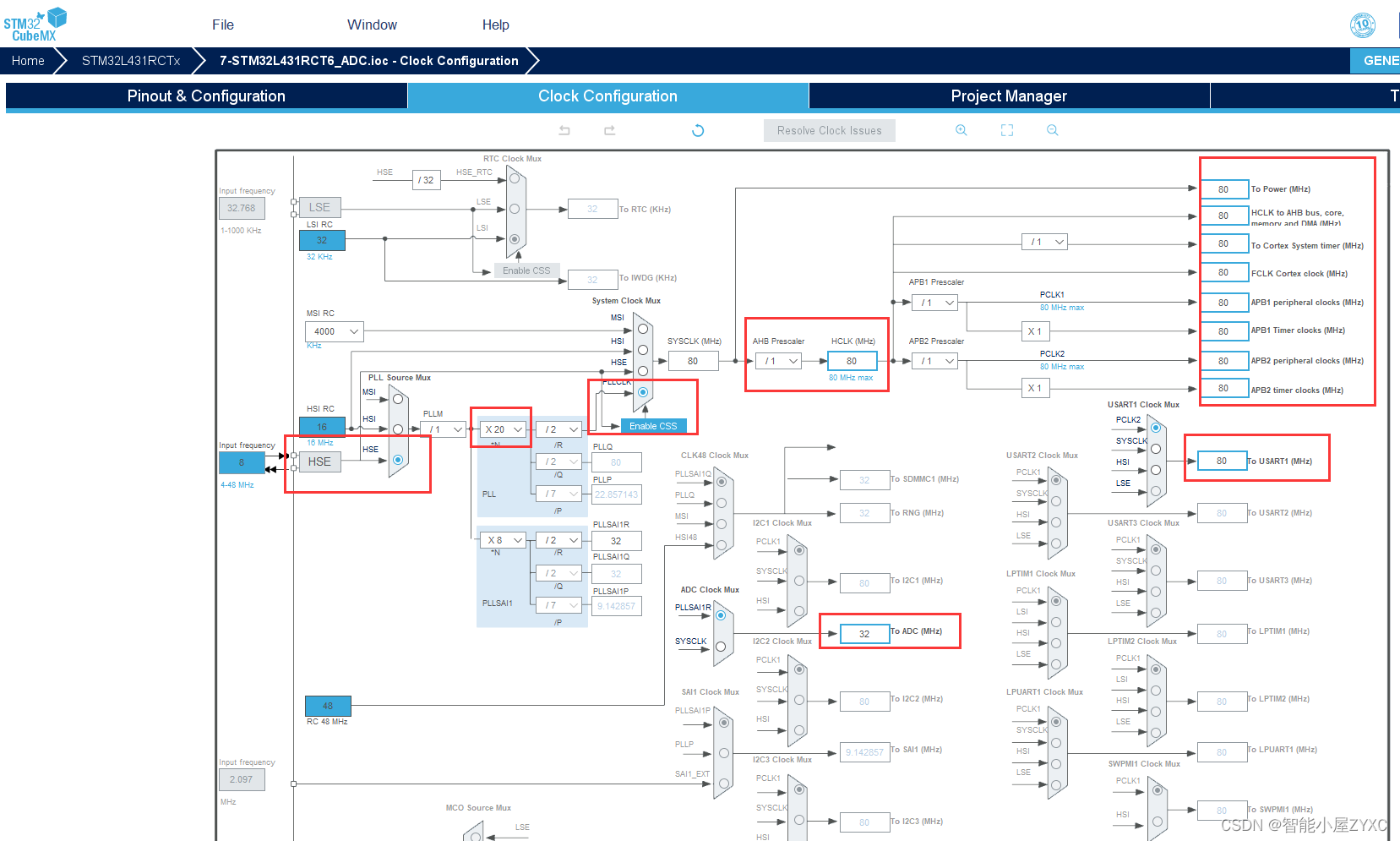
(1)配置时钟树,用于系统内部时钟,以及各个外设时钟等。此处选择外部8M晶振作为主时钟频率,内部最大倍频80MHz。

(2)完成配置工程。
备注:需要注意代码生成过程中的继承关系,如图所示:需要保留开发者自己编写的代码时,请根据配置设置,不然生成代码后会删除自己编写的代码(从这个方面也可以看出开发者备份自己的代码是多么的重要。)


(3)生成代码。

三、在KEIL 5中编写代码
1、使用KEIL 5(MDK)打开项目工程文件
(1)找到刚才新建工程的存储路径,安装项目名称,打开项目工程。

2、 添加LED系统指示灯提示
(1)添加每隔500ms,LED1闪烁一次的系统提示,用于提示程序运行正常。

3、添加DS1302驱动
(1)在bsp_ds1302.c文件中添加DS1302相关的驱动代码。
- /* USER CODE BEGIN 1 */
-
- /* USER CODE BEGIN 3 */
-
- #include "bsp_ds1302.h"
- #include "stdio.h"
- data_time_t data_time=
- {
- 0x22, //年
- 0x05, //月
- 0x01, //日
- 0x08, //时
- 0x15, //分
- 0x37, //秒
- 0x07, //星期日
- 0
- }; //写入初始化的时间默认值
- /*****************************************
- * 函数名:void DS1302_delay(u8 dd)
- * 描述 :简单延时
- * 输入 :
- * 输出 :无
- * 调用 :
- *************************************/
- void DS1302_delay(uint8_t dd)
- {
- uint8_t i;
- for(;dd>0;dd--)
- for(i=110;i>0;i--);
- }
-
- /*****************************************
- * 函数名:void DS1302_GPIOInit(void)
- * 描述 :DS1302 GPIO配置
- * 输入 :
- * 输出 :无
- * 调用 :
- CE---PB8,
- CLK--->PB6,
- SDA--->PB7,
- *************************************/
- void DS1302_GPIOInit(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure = {0};
- __HAL_RCC_GPIOB_CLK_ENABLE();
- /*Configure GPIO pin : SDA SCL */
- GPIO_InitStructure.Pin = ds1302_SDA | ds1302_SCL;
- GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;
- GPIO_InitStructure.Pull = GPIO_NOPULL;
- GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
- HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
-
- /*Configure GPIO pin : CE */
- GPIO_InitStructure.Pin = ds1302_CE_PIN;
- GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;
- GPIO_InitStructure.Pull = GPIO_NOPULL;
- GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
- HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
- }
- /*****************************************
- * 函数名:void DS1302_IO_GPIO(void)
- * 描述 :DS1302 之 IO GPIO 输入输出配置
- * 输入 :FLAG标志位
- * 输出 :无
- * 调用 :OUT:表示输出,IN:表示输入
- FLAG:
- *************************************/
- void DS1302_IO_GPIO(uchar FLAG)
- {
- GPIO_InitTypeDef GPIO_InitStructre;
- /**********配置数据IO端口 输出 **********/
- if(FLAG==0x01)
- {
- GPIO_InitStructre.Pin= ds1302_SDA;//配置IO_GPIO
- GPIO_InitStructre.Speed=GPIO_SPEED_FREQ_HIGH;
- GPIO_InitStructre.Mode=GPIO_MODE_OUTPUT_PP;
- HAL_GPIO_Init(ds1302_GPIO, &GPIO_InitStructre);
- }
- /**********配置数据IO端口 输入**********/
- else if(FLAG==0x00)
- {
- GPIO_InitStructre.Pin= ds1302_SDA;//配置IO_GPIO
- GPIO_InitStructre.Speed=GPIO_SPEED_FREQ_HIGH;
- GPIO_InitStructre.Mode=GPIO_MODE_INPUT; //配置上拉输入
- HAL_GPIO_Init(ds1302_GPIO, &GPIO_InitStructre);
- }
- }
-
- void ds1302_write_gpio_init(void)
- {
- HAL_GPIO_WritePin(ds1302_GPIO,ds1302_SDA,GPIO_PIN_SET); //初始化设置SDA
- HAL_GPIO_WritePin(ds1302_GPIO,ds1302_SCL,GPIO_PIN_SET); //初始化设置SCL
- HAL_GPIO_WritePin(ds1302_CE_GPIO,ds1302_CE_PIN,GPIO_PIN_RESET); //初始化设置CE
- }
- /*****************************************
- * 函数名:void ds1302_write_byte(uchar addr, uchar d)
- * 描述 :DS1302写指令和数据
- * 输入 :add:发送地址,dat:所在数据
- * 输出 :无
- * 调用 :
- *************************************/
- void ds1302_write_byte(uchar addr, uchar d)
- {
- uchar i;
- CE_H();
- for (i = 0; i < 8; i ++) //发送地址
- {
- if (addr & 0x01)
- {
- DS1302_SDA_H();
- }
- else
- {
- DS1302_SDA_L();
- }
- addr = addr >> 1;
- DS1302_SCL_H();
- DS1302_delay(2);
- DS1302_SCL_L();
- }
- for (i = 0; i < 8; i ++) //发送数据
- {
- if (d & 0x01)
- {
- DS1302_SDA_H();
- }
- else
- {
- DS1302_SDA_L();
- }
- d = d >> 1;
- DS1302_SCL_H();
- DS1302_delay(2);
- DS1302_SCL_L();
-
- }
- CE_L();
- }
- /*****************************************
- * 函数名:uchar ds1302_read_byte(uchar addr)
- * 描述 :DS1302读数据
- * 输入 :add:地址
- * 输出 :无
- * 调用 :
- *************************************/
- uchar ds1302_read_byte(uchar addr)
- {
- uchar i=0,temp=0,mm=0,nn=0,value=0;
- CE_H();
- for (i = 0; i < 8; i ++) //写地址
- {
- if (addr & 0x01)
- {
- DS1302_SDA_H();
- }
- else
- {
- DS1302_SDA_L();
- }
- addr = addr >> 1;
- DS1302_SCL_H();
- DS1302_delay(2);
- DS1302_SCL_L();
- }
- DS1302_IO_GPIO(0); //配置为输入
- for (i = 0; i < 8; i ++) //读数据
- {
- temp = temp >> 1;
- if(HAL_GPIO_ReadPin(ds1302_GPIO, ds1302_SDA)==1)
- {
- temp |= 0x80;
- }
- else
- {
- temp &= 0x7F;
- }
- DS1302_SCL_H();
- DS1302_delay(2);
- DS1302_SCL_L();
- }
- CE_L();
- DS1302_IO_GPIO(1); //配置为输出
- mm=temp/16;
- nn=temp%16;
- value=mm*10+nn; //数据处理转化十进制
- return value;
- }
- void ds1302_write_time(void)
- {
- // printf("set time %x-%x-%x %x:%x:%x %x\r\n",data_time.year,data_time.months,data_time.day,data_time.hour,data_time.min,data_time.second,data_time.week_time);
- ds1302_write_byte(ds1302_control_add,0x00); //关闭写保护,允许向其他寄存器写数据
- ds1302_write_byte(ds1302_year_add,data_time.year); //初始化年
- ds1302_write_byte(ds1302_month_add ,data_time.months); //初始化月
- ds1302_write_byte(ds1302_day_add,data_time.day); //初始化日
- ds1302_write_byte(ds1302_hr_add,data_time.hour); //初始化时
- ds1302_write_byte(ds1302_min_add,data_time.min); //初始化分
- ds1302_write_byte(ds1302_sec_add,data_time.second); //初始化秒
- ds1302_write_byte(ds1302_week_time_add,data_time.week_time);//初始化工作日
- ds1302_write_byte(ds1302_control_add,0x80); //打开写保护,阻止向任何其他寄存器写数据
- }
-
- /*****************************************
- * 函数名:void DS1302_init(uchar *time)
- * 描述 : DS1302初始化
- * 输入 :无
- * 输出 :无
- * 调用 :
- *************************************/
- void DS1302_init(void)
- {
- DS1302_GPIOInit(); //GPIO初始化配置
- DS1302_delay(2);
- CE_L() ; //CE=0;
- DS1302_SCL_L(); // CLK=0;
- //下面是对DS1302启动电池,不掉电 设置时间
- ds1302_write_byte(ds1302_control_add,0x00); //WP=0 允许数据写入DS1302
- ds1302_write_byte(ds1302_charger_add,0xA7); //充电(1个二极管+8K电阻)
- ds1302_write_byte(ds1302_control_add,0X80); //开启保护 WP=1
- if(ds1302_read_byte(0X81)&0X80) //查询DS302时钟是否启动,如果时钟停止走动:启动时钟+初始化时钟
- {
- ds1302_write_time(); //设置初始时钟,芯片第一次工作需要写入初始值,否则无法计时
- }
- else
- {
- ds1302_write_time(); //第一次初始化之后需要注释该语句,否则没次reset都会重新写入初始化时间。只要纽扣电池存在,初始化只需要写入一次就可以屏蔽了。
- }
- }
- /*****************************************
- * 函数名:void ds1302_read_time(uchar *time)
- * 描述 :DS1302读取时间
- * 输入 :无
- * 输出 :无
- * 调用 :
- *************************************/
- void ds1302_read_time(void)
- {
- data_time.label2[0] = ds1302_read_byte( 0x8D)/10;
- data_time.label2[1] = ds1302_read_byte( 0x8D)%10; //年
- data_time.label2[2] = '/';
- data_time.label2[3] = ds1302_read_byte( 0x89)/10;
- data_time.label2[4] = ds1302_read_byte( 0x89)%10; //月
- data_time.label2[5] = '/';
- data_time.label2[6] = ds1302_read_byte( 0x87)/10;
- data_time.label2[7] = ds1302_read_byte( 0x87)%10; //日
- data_time.label2[8] = ds1302_read_byte( 0x85)/10;
- data_time.label2[9] = ds1302_read_byte( 0x85)%10; //时
- data_time.label2[10] = ':';
- data_time.label2[11] = ds1302_read_byte( 0x83)/10;
- data_time.label2[12] = ds1302_read_byte( 0x83)%10; //分
- data_time.label2[13] = ':';
- data_time.label2[14] = ds1302_read_byte( 0x81)/10;
- data_time.label2[15] = ds1302_read_byte( 0x81)%10; //秒
- printf("read time %d%d%c%d%d%c%d%d %d%d%c%d%d%c%d%d\r\n",data_time.label2[0],data_time.label2[1],data_time.label2[2],data_time.label2[3],data_time.label2[4],data_time.label2[5],data_time.label2[6],data_time.label2[7],data_time.label2[8],data_time.label2[9],data_time.label2[10],data_time.label2[11],data_time.label2[12],data_time.label2[13],data_time.label2[14],data_time.label2[15]);
- }
-
-
- /* USER CODE END 1 */
(2)在bsp_ds1302.h中添加外部调用所需的函数声明。
- /* USER CODE BEGIN Private defines */
- #ifndef _BSP_DS1302_H_
- #define _BSP_DS1302_H_
- #include "main.h"
- #define uchar unsigned char
- #define uint unsigned int
- //DS1302寄存器操作指令定义时间地址
- #define ds1302_week_time_add 0x8a //工作日,星期1~7
- #define ds1302_sec_add 0x80 //秒
- #define ds1302_min_add 0x82 //分
- #define ds1302_hr_add 0x84 //时
- #define ds1302_day_add 0x86 //日,1~30日
- #define ds1302_month_add 0x88 //月
- #define ds1302_year_add 0x8c //年
- #define ds1302_control_add 0x8e //写保护
- #define ds1302_charger_add 0x90 //充电(1个二极管+8K电阻)
- #define ds1302_clkburst_add 0xbe
-
-
- #define ds1302_GPIO GPIOB
- #define ds1302_SDA GPIO_PIN_7
- #define ds1302_SCL GPIO_PIN_6
-
- #define ds1302_CE_GPIO GPIOB
- #define ds1302_CE_PIN GPIO_PIN_8
-
- #define DS1302_SDA_H() (ds1302_GPIO->BSRR |= ds1302_SDA)
- #define DS1302_SDA_L() (ds1302_GPIO->BRR |= ds1302_SDA)
- #define DS1302_SCL_H() (ds1302_GPIO->BSRR |= ds1302_SCL)
- #define DS1302_SCL_L() (ds1302_GPIO->BRR |= ds1302_SCL)
-
- #define CE_H() (ds1302_CE_GPIO->BSRR |= ds1302_CE_PIN)
- #define CE_L() (ds1302_CE_GPIO->BRR |= ds1302_CE_PIN)
-
- typedef struct
- {
- uint8_t year; //年
- uint8_t months; //月
- uint8_t day; //日
- uint8_t hour; //时
- uint8_t min; //分
- uint8_t second; //秒
- uint16_t week_time; //周时间,星期1~7
- uint8_t label2[16]; //时间存放数组显示格式
- }data_time_t;
- extern data_time_t data_time;
- void DS1302_GPIOInit(void);
- void ds1302_write_time(void);
- void ds1302_read_time(void);
- void DS1302_init(void);
- void ds1302_write_gpio_init(void);
-
- #endif
-
-
-
-
- /* USER CODE END Private defines */
(3)在main.c函数中进行调用。
- /* Initialize all configured peripherals */
- MX_GPIO_Init();
- MX_USART1_UART_Init();
- /* USER CODE BEGIN 2 */
- ds1302_write_gpio_init(); //初始化默认的GPIO
- DS1302_init(); //DS1302写入初始值,否则无法正常工作
-
-
- /* USER CODE END 2 */
-
- /* Infinite loop */
- /* USER CODE BEGIN WHILE */
- while (1)
- {
- /* USER CODE END WHILE */
-
- /* USER CODE BEGIN 3 */
- HAL_Delay(500);
- HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_0); //设置LED1反转
- ds1302_read_time(); //读取时间,并打印
-
-
- }
- /* USER CODE END 3 */
4、设置编程仿真下载模式
(1)选择Options for target ...>>Debug>>J-Link/J-JTRACE Cortex,点击Settings>>选择Port(SW),可以看到搜索成功SW Device,表示芯片可用,可以下载。

(2)点击Download(或者快捷键F8),即可下载程序。

(3) 如果下载程序后,没有看到LED1灯闪烁,可以按下述方式设置一下(Reset and run表示下载后自动复位和重启运行)。或者重新彻底断电再次上电(或按开发板的Reset按键复位MCU即可)。

5、查看串口发送函数打印log效果
(1)设置串口助手参数为:115200、NONE、8、 1(和代码中串口初始化参数一致)。
(2)设置成功后,就可以看到串口打印的效果。每隔500ms闪烁LED1指示灯一次,且串口输出一个log。

(3)备注:第一次初始化程序时需要注意标准函数的调用,当有纽扣电池时,初始化完毕后就可以屏蔽该函数了,否则没次初始化时,会重新进行时钟初始化。

————————————————
版权声明:智能小屋ZYXC
|
.png) STMCU小助手
发布时间:2023-1-14 18:34
STMCU小助手
发布时间:2023-1-14 18:34
 微信公众号
微信公众号
 手机版
手机版